




 本文介绍了如何在QT环境中利用C++进行海康威视工业相机的二次开发,包括从下载SDK到配置VS和QT环境,以及在QT中配置相机SDK和OpenCV库的过程。通过参考相关博客,成功实现了相机的基本功能,如显示图像、保存图片等。
本文介绍了如何在QT环境中利用C++进行海康威视工业相机的二次开发,包括从下载SDK到配置VS和QT环境,以及在QT中配置相机SDK和OpenCV库的过程。通过参考相关博客,成功实现了相机的基本功能,如显示图像、保存图片等。
1.了解海康威视工业相机
本人学习参考的是:boss_dog的博客,里面有详细的分析相机的数据,各种相机的区别,在VS中部署SDK的环境变量以及官方例程.
1.1.下载SDK
海康威视的工业相机二次开发首先是需要在官方下载相机的SDK,下载地址_官方下载地址,根据自身的环境区下载需要的SDK,本人下载的是(机器视觉工业相机客户端MVS V3.3.1(Windows)).
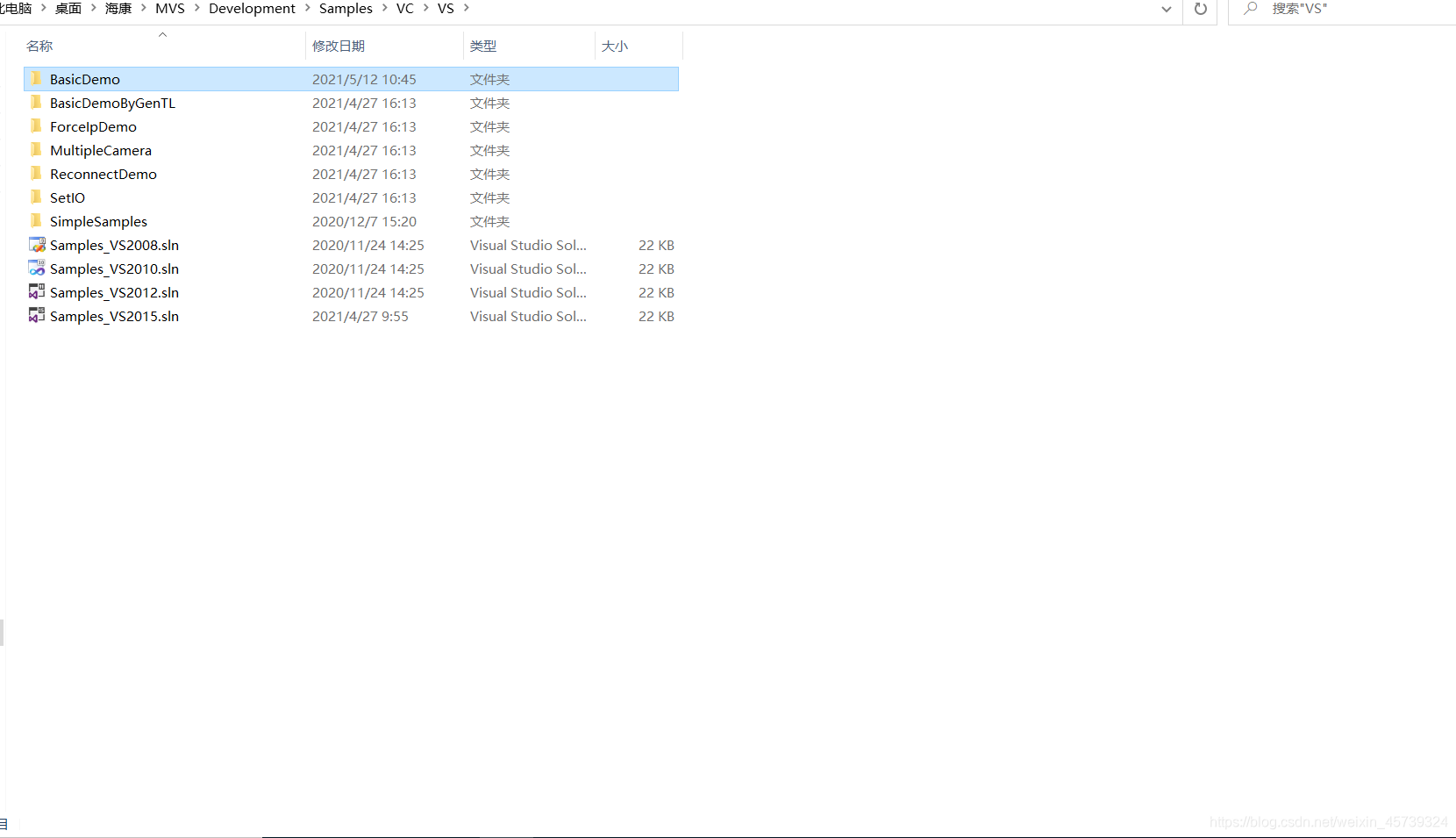
下载后打开下图中的文件,是VS+C++的Demo,本人用到的是第一个demo,打开相机保存图片.
1.2.环境配置
PS:不管运行海康威视的哪个例程,都需要先配置下环境
在VS项目中配置opencv和mvs的动态链接库等(用到Opencv的话)
①在VS中配置Opencv


②在VS中配置MVS


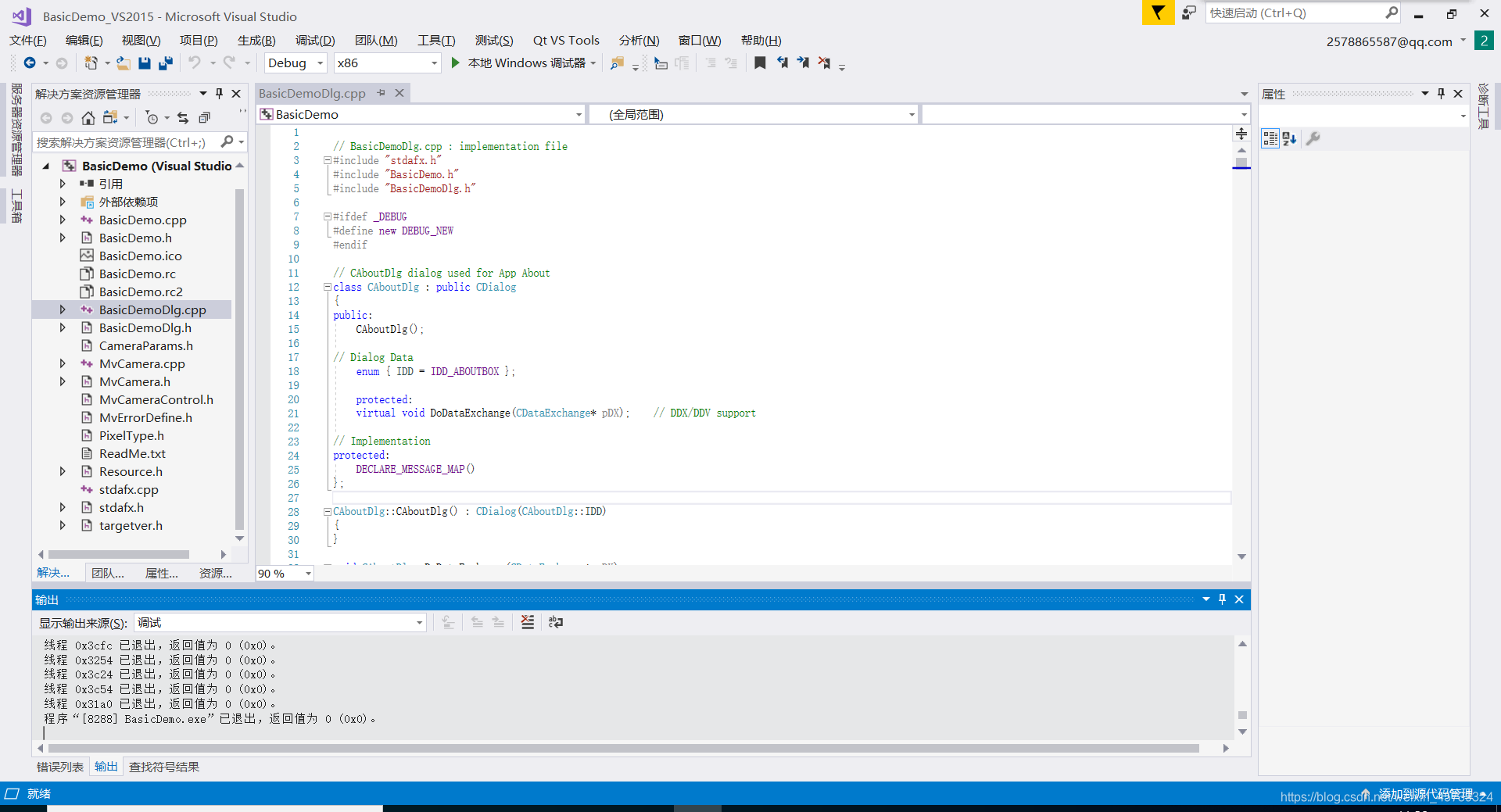
环境配置完成后,将官方的demo导入到VS中基本上就能运行了.
下图就是实现基本功能的代码,在BasicDemoDlg.cpp中就是自己写的代码根据调用官方的SDK来实现基本功能.

2.在QT中实现官方demo中的功能
2.1.首先我们需要在qt中配置好实现功能的环境:
2.1.1 配置好相机SDK的环境,参考博客:大樱桃的博客_大_樱_桃_优快云博客-Halcon,工业相机,Halcon_C#l联合编程领域博主.
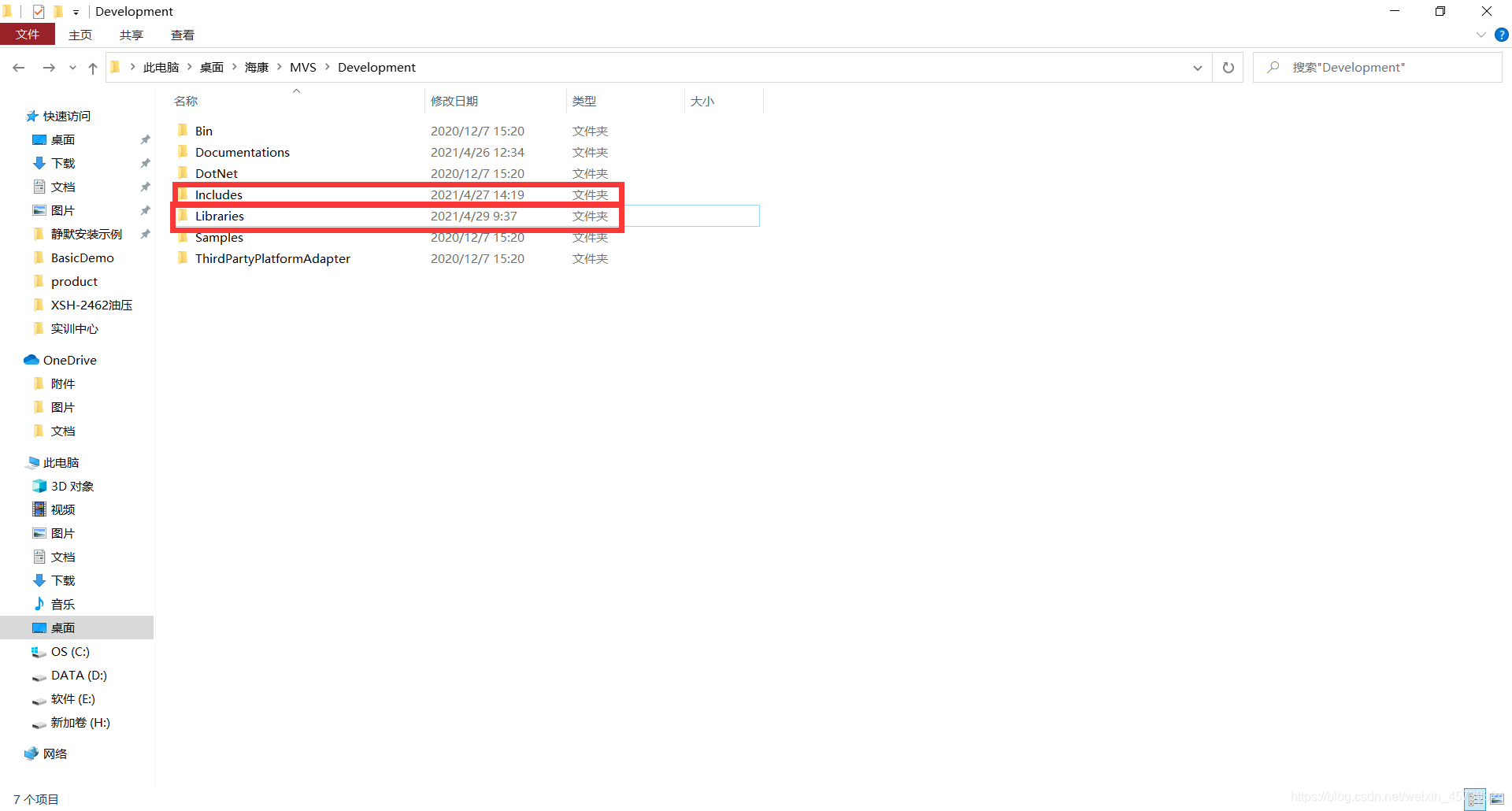
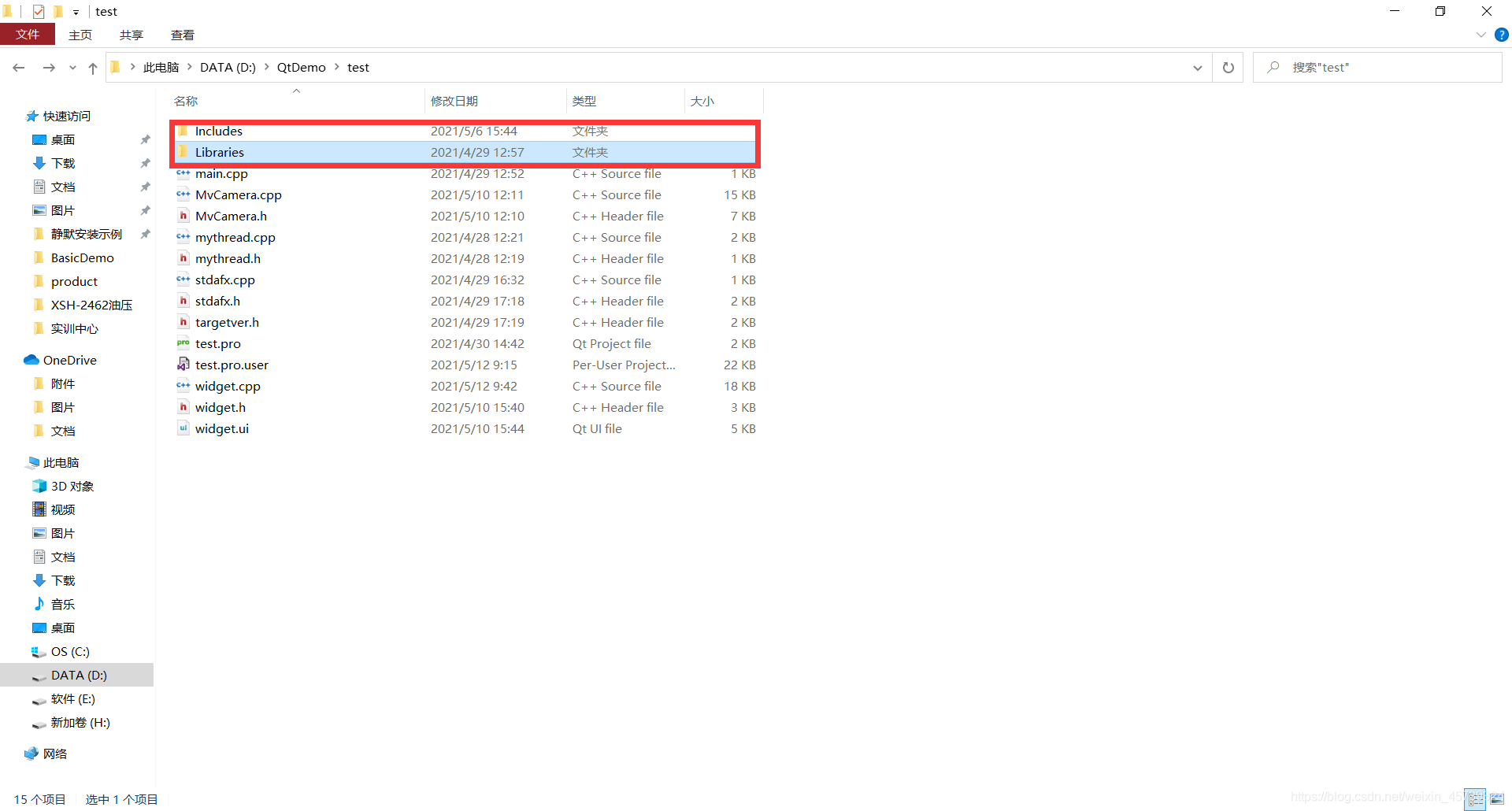
先在QT中创建一个项目,将海康的MVS文件下Development文件里面的Includes以及Libraries文件复制到qt的项目文件下.
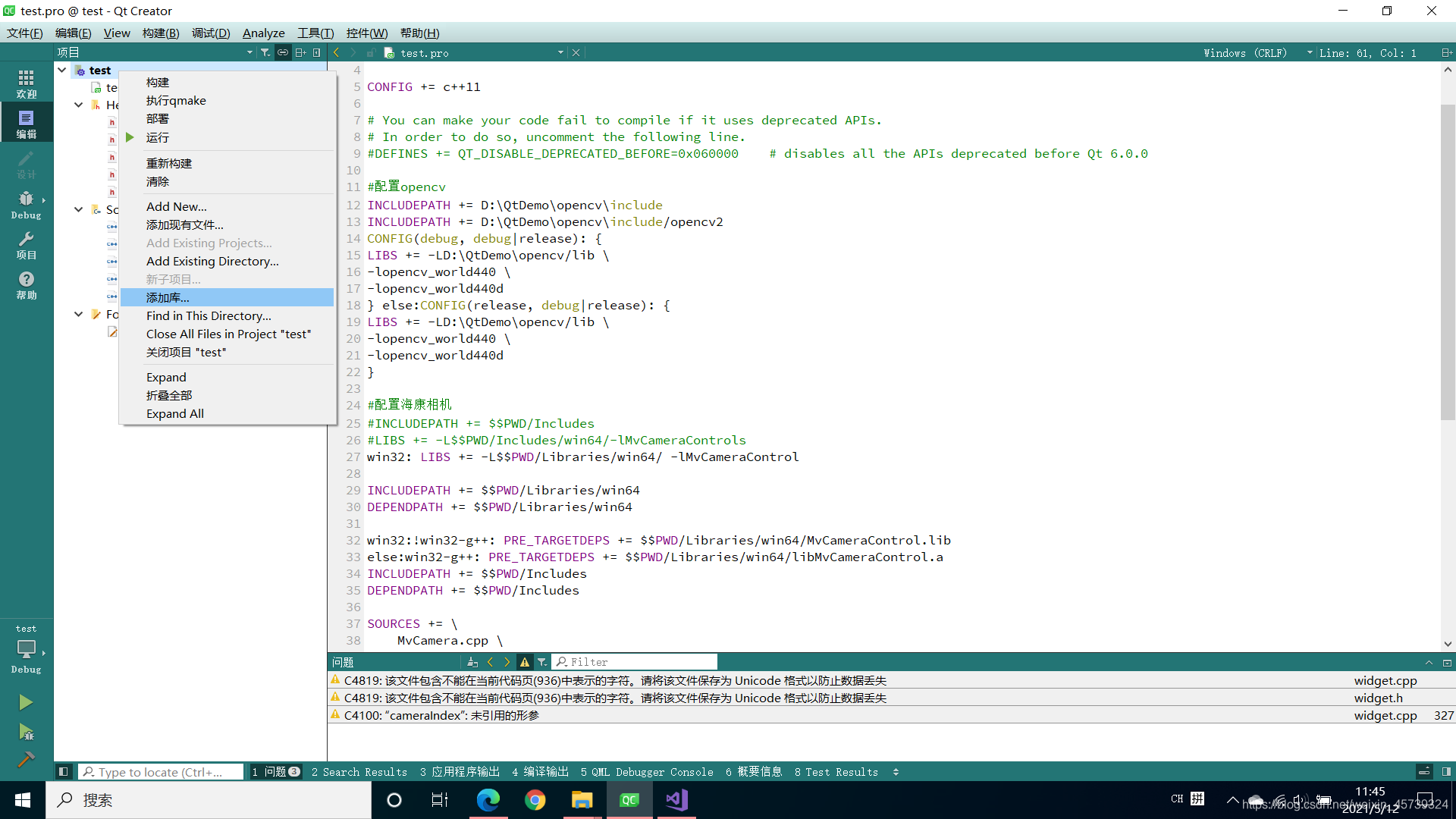
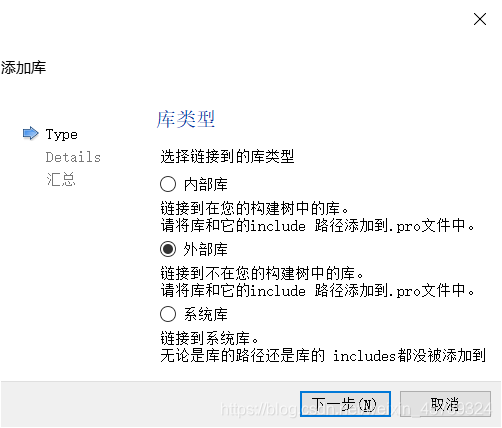
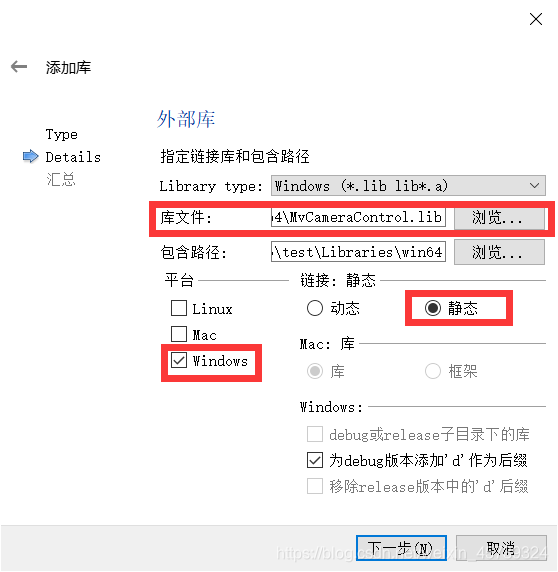
复制完成后在QT中右击项目文件,点击添加库,选择外部库,点击下一步,选择库文件,选择平台和静态链接,点下一步就行了.
导入库后生成的代码片段:
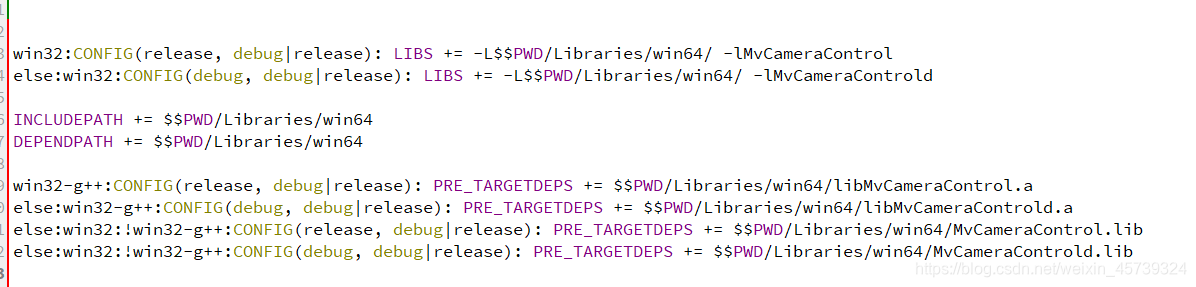
生成代码片段后再加入Include,相机的头文件,相机的SDK和环境就配置完成了.
INCLUDEPATH += $$PWD/IncludesDEPENDPATH += $$PWD/Includes
2.1.2 配置opencv的环境变量:在配置opencv的路上我也是经历了很多坎坷,,,查阅无数文档,大部分都是使用MinGV,可以参考博客:拜小白教你Qt5.8.0+OpenCV3.2.0配置教程(详细版)_拜小白的成长之路,告别小白-优快云博客,但是我是先使用的VS的运行环境,然后QT在VS的运行环境下建立的,可以参考Qt5.9.6+opencv+VS2017的安装及配置_我内疚的博客-优快云博客。反正这种配置环境的路上就是不断地查找文档,不断地更改。,慢慢摸索,,最终我在qt上配置的opencv的代码是:
INCLUDEPATH += D:\QtDemo\opencv\includeINCLUDEPATH += D:\QtDemo\opencv\include/opencv2CONFIG(debug, debug|release): {LIBS += -LD:\QtDemo\opencv/lib \-lopencv_world440 \-lopencv_world440d} else:CONFIG(release, debug|release): {LIBS += -LD:\QtDemo\opencv/lib \-lopencv_world440 \-lopencv_world440d}
环境配置完成后,接着把相机封装好的函数体:cpp文件和头文件复制到项目文件下:MVCamera.cpp和MVCamera.h
接着又是参考:海康威视工业相机SDK二次开发(VS+Opencv+QT+海康SDK+C++)(二)_boss-dog的博客-优快云博客其中的源代码,结合上官方自带的SDK,就完成了一些基本的显示相机采集的画面,保存图片,获取相机IP,软触发等功能。
3.我的源代码是:
MVCamera.h
/************************************************************************//* 以C++接口为基础,对常用函数进行二次封装,方便用户使用 *//************************************************************************/#ifndef _MV_CAMERA_H_#define _MV_CAMERA_H_#include "Includes/MvCameraControl.h"#include <string.h>#include"opencv2/opencv.hpp"#include"opencv2/imgproc/types_c.h"#ifndef MV_NULL#define MV_NULL 0#endifclass CMvCamera{public:CMvCamera();~CMvCamera();// ch:获取SDK版本号 | en:Get SDK Versionstatic int GetSDKVersion();// ch:枚举设备 | en:Enumerate Devicestatic int EnumDevices(unsigned int nTLayerType, MV_CC_DEVICE_INFO_LIST* pstDevList);// ch:判断设备是否可达 | en:Is the device accessiblestatic bool IsDeviceAccessible(MV_CC_DEVICE_INFO* pstDevInfo, unsigned int nAccessMode);// ch:打开设备 | en:Open Deviceint Open(MV_CC_DEVICE_INFO* pstDeviceInfo);// ch:关闭设备 | en:Close Deviceint Close();// ch:判断相机是否处于连接状态 | en:Is The Device Connectedbool IsDeviceConnected();// ch:注册图像数据回调 | en:Register Image Data CallBackint RegisterImageCallBack(void(__stdcall* cbOutput)(unsigned char * pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser);// ch:开启抓图 | en:Start Grabbingint StartGrabbing();// ch:停止抓图 | en:Stop Grabbingint StopGrabbing();// ch:主动获取一帧图像数据 | en:Get one frame initiativelyint GetImageBuffer(MV_FRAME_OUT* pFrame, int nMsec);// ch:主动获取一帧图像数据 | en:Get one frame initiativelyint GetOneFrameTimeout(unsigned char* pData, unsigned int* pnDataLen, unsigned int nDataSize, MV_FRAME_OUT_INFO_EX* pFrameInfo, int nMsec);// ch:释放图像缓存 | en:Free image bufferint FreeImageBuffer(MV_FRAME_OUT* pFrame);// ch:显示一帧图像 | en:Display one frame imageint DisplayOneFrame(MV_DISPLAY_FRAME_INFO* pDisplayInfo);// ch:设置SDK内部图像缓存节点个数 | en:Set the number of the internal image cache nodes in SDKint SetImageNodeNum(unsigned int nNum);// ch:获取设备信息 | en:Get device informationint GetDeviceInfo(MV_CC_DEVICE_INFO* pstDevInfo);// ch:获取GEV相机的统计信息 | en:Get detect info of GEV cameraint GetGevAllMatchInfo(MV_MATCH_INFO_NET_DETECT* pMatchInfoNetDetect);// ch:获取U3V相机的统计信息 | en:Get detect info of U3V cameraint GetU3VAllMatchInfo(MV_MATCH_INFO_USB_DETECT* pMatchInfoUSBDetect);// ch:获取和设置Int型参数,如 Width和Height,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Int type parameters, such as Width and Height, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetIntValue(IN const char* strKey, OUT unsigned int* pIntValue);int SetIntValue(IN const char* strKey, IN int64_t nValue);// ch:获取和设置Enum型参数,如 PixelFormat,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Enum type parameters, such as PixelFormat, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetEnumValue(IN const char* strKey, OUT MVCC_ENUMVALUE *pEnumValue);int SetEnumValue(IN const char* strKey, IN unsigned int nValue);int SetEnumValueByString(IN const char* strKey, IN const char* sValue);// ch:获取和设置Float型参数,如 ExposureTime和Gain,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Float type parameters, such as ExposureTime and Gain, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetFloatValue(IN const char* strKey, OUT MVCC_FLOATVALUE *pFloatValue);int SetFloatValue(IN const char* strKey, IN float fValue);// ch:获取和设置Bool型参数,如 ReverseX,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Bool type parameters, such as ReverseX, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetBoolValue(IN const char* strKey, OUT bool *pbValue);int SetBoolValue(IN const char* strKey, IN bool bValue);// ch:获取和设置String型参数,如 DeviceUserID,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件UserSetSave// en:Get String type parameters, such as DeviceUserID, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetStringValue(IN const char* strKey, MVCC_STRINGVALUE *pStringValue);int SetStringValue(IN const char* strKey, IN const char * strValue);// ch:执行一次Command型命令,如 UserSetSave,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Execute Command once, such as UserSetSave, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint CommandExecute(IN const char* strKey);// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)int GetOptimalPacketSize(unsigned int* pOptimalPacketSize);// ch:注册消息异常回调 | en:Register Message Exception CallBackint RegisterExceptionCallBack(void(__stdcall* cbException)(unsigned int nMsgType, void* pUser), void* pUser);// ch:注册单个事件回调 | en:Register Event CallBackint RegisterEventCallBack(const char* pEventName, void(__stdcall* cbEvent)(MV_EVENT_OUT_INFO * pEventInfo, void* pUser), void* pUser);// ch:强制IP | en:Force IPint ForceIp(unsigned int nIP, unsigned int nSubNetMask, unsigned int nDefaultGateWay);// ch:配置IP方式 | en:IP configuration methodint SetIpConfig(unsigned int nType);// ch:设置网络传输模式 | en:Set Net Transfer Modeint SetNetTransMode(unsigned int nType);// ch:像素格式转换 | en:Pixel format conversionint ConvertPixelType(MV_CC_PIXEL_CONVERT_PARAM* pstCvtParam);// ch:保存图片 | en:save imageint SaveImage(MV_SAVE_IMAGE_PARAM_EX* pstParam);// ch:保存图片为文件 | en:Save the image as a fileint SaveImageToFile(MV_SAVE_IMG_TO_FILE_PARAM* pstParam);//设置是否为触发模式int setTriggerMode(unsigned int TriggerModeNum);//设置触发源int setTriggerSource(unsigned int TriggerSourceNum);//软触发int softTrigger();//读取bufferint ReadBuffer(cv::Mat& image);private:void* m_hDevHandle;public:unsigned int m_nTLayerType;unsigned char* m_pBufForSaveImage; // 用于保存图像的缓存unsigned int m_nBufSizeForSaveImage;unsigned char* m_pBufForDriver; // 用于从驱动获取图像的缓存unsigned int m_nBufSizeForDriver;};#endif//_MV_CAMERA_H_
mythread.h#ifndef MYTHREAD_H#define MYTHREAD_H#include "QThread"#include "MvCamera.h"#include "opencv2/opencv.hpp"#include "opencv2/core/core.hpp"#include "opencv2/calib3d/calib3d.hpp"#include "opencv2/highgui/highgui.hpp"#include <vector>#include <string>#include <algorithm>#include <iostream>#include <iterator>#include <stdio.h>#include <stdlib.h>#include <ctype.h>using namespace std;using namespace cv;class MyThread :public QThread{Q_OBJECTpublic:MyThread();~MyThread();void run();void getCameraPtr(CMvCamera* camera);void getImagePtr(Mat* image);void getCameraIndex(int index);signals:void mess();void Display(const Mat* image, int index);private:CMvCamera* cameraPtr = NULL;cv::Mat* imagePtr = NULL;int cameraIndex = NULL;int TriggerMode;};#endif // MYTHREAD_H#pragma once
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 716
716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









