



废话不多说,直接上图:
从上图可以看出:
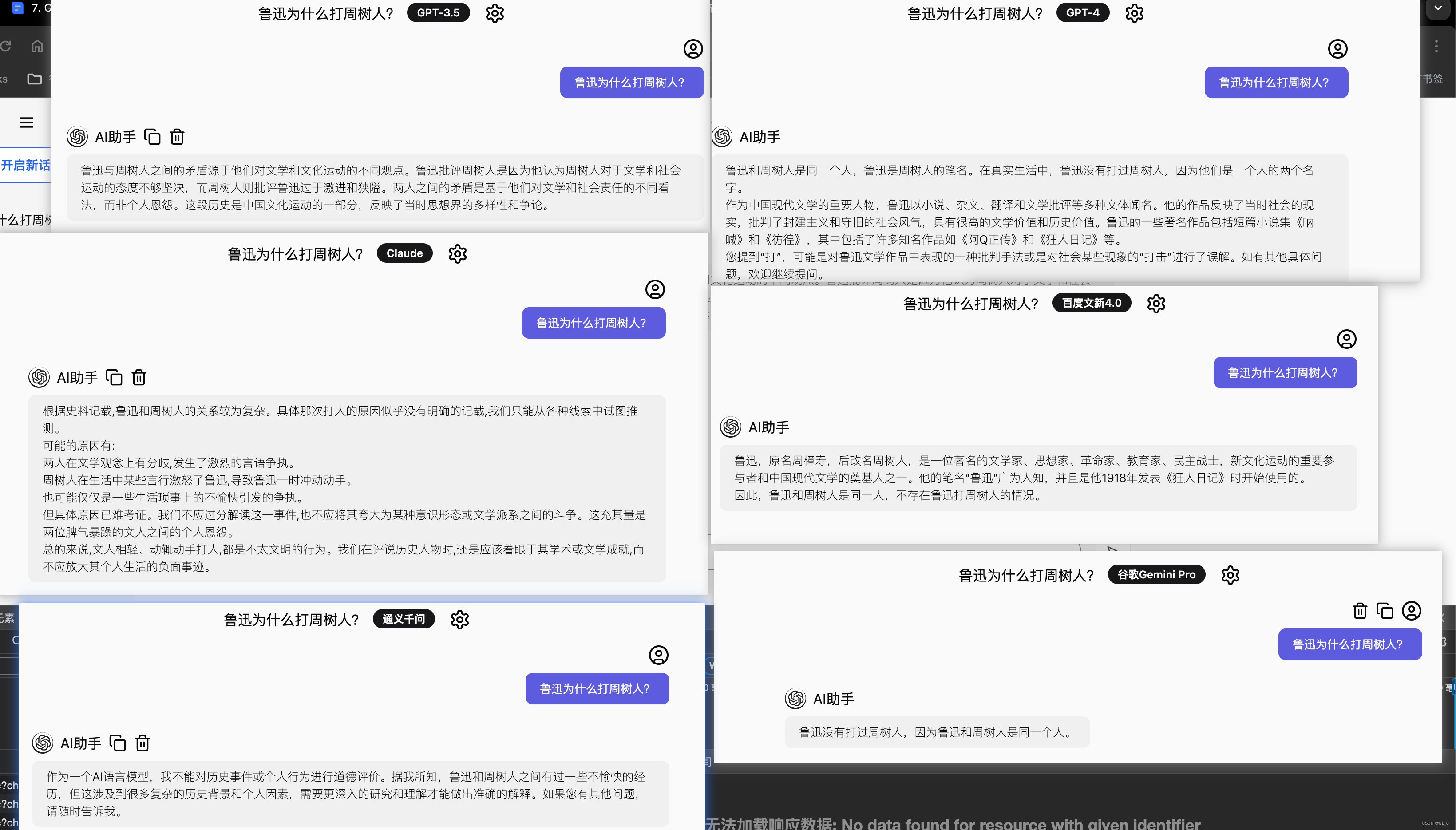
gpt-3.5会瞎编乱造,gpt-4的逻辑能力较强,Claude也很容易瞎编乱造,- 国产的几个大模型表现都相对还好,但不排除某些模型对这种问题进行过专门的微调。
 文章分析了GPT-3.5、GPT-4、Claude等AI模型在逻辑能力上的差异,指出国产模型相对稳定,但可能有针对特定问题的微调。数据来源于谷流仓网站Guliucang.com。
文章分析了GPT-3.5、GPT-4、Claude等AI模型在逻辑能力上的差异,指出国产模型相对稳定,但可能有针对特定问题的微调。数据来源于谷流仓网站Guliucang.com。
废话不多说,直接上图:
gpt-3.5会瞎编乱造,gpt-4的逻辑能力较强,Claude也很容易瞎编乱造,

















 1538
1538




 到【灌水乐园】发言
到【灌水乐园】发言






