




目录
一、实验任务
学习嵌入式实时操作系统(RTOS),以uc/OS为例,将其移植到stm32F103上,构建至少3个任务(task):其中两个task分别以1s和3s周期对LED灯进行点亮-熄灭的控制;另外一个task以2s周期通过串口发送“hello uc/OS! 欢迎来到RTOS多任务环境!”。记录详细的移植过程。
二、了解嵌入式实时操作系统
嵌入式实时操作系统是一个特殊的程序,是一个支持多任务的运行环境。嵌入式实时操作系统最大的特点就是“实时性”,如果有一个任务需要执行,实时操作系统会立即执行该任务,不会有较长的延时。典型的实时操作系统有uCOS ,RT-Thread,FreeRTOS ,VxWorks,WinCE等。
嵌入式实时操作系统是一个特殊的程序(通常称为内核),它可以创建,销毁,控制所有任务。嵌入式实时操作系统除了包含一个内核以外,还提供其他服务,如文件系统,协议栈,图形用户界面等。本文的重点在于了解嵌入式实时操作系统内核的工作原理和结构,因此文中提到的实时操作系统通常指的是操作系统内核。实时操作系统内核通常要占用5%左右的CPU运行时间,另外内核是一个软件代码,需要额外占用ROM空间和RAM空间。
实时性
实时性可以定义为:触发条件产生后系统的反应能力。通俗的描述就是“天下武功唯快不破”,能达到所需要的“快”就是实时,在不同的场合需要达到us级、ns级。实时系统不仅仅只表现在“快”上,更主要的是实时系统需要对触发事件在限定时间内做出反应,这个限定时间是根据实际需要来定,例如自动驾驶控制系统的规定时间要求很短,需要在极短时间内做出动作;一些农业温度控制系统的规定时间要求比较长,需要温度控制平滑稳定。
响应时间
实时性越强,其响应时间越短。响应时间是指系统识别到一个事件到开始做出响应的时间。举一个简单的例子:一个工控设备有一个急停按键开关,用户希望按下急停开关的时候系统立即将停止所有的动作,假设用户在第1.001秒时按下了急停开关,软件系统在第1.011秒时执行了停止指令,工控设备相应的机械部件在1.211秒停止动作,此时软件系统响应时间为0.01秒,设备系统响应时间为0.21秒,设备系统的响应时间和软件系统的响应时间有一定区别,通常情况下设备系统的响应时间>软件系统的响应时间。本文中提到的响应时间指的是软件系统的响应时间。
实时操作系统组成
实时操作系由以下3个子系统组成(以uCOS和FreeRTOS为参考对象):
1、任务调度子系统
2、任务通信子系统
3、内存管理子系统
三、使用CubeMX建立STM32F103C8T6HAL库
创建新工程
配置环境
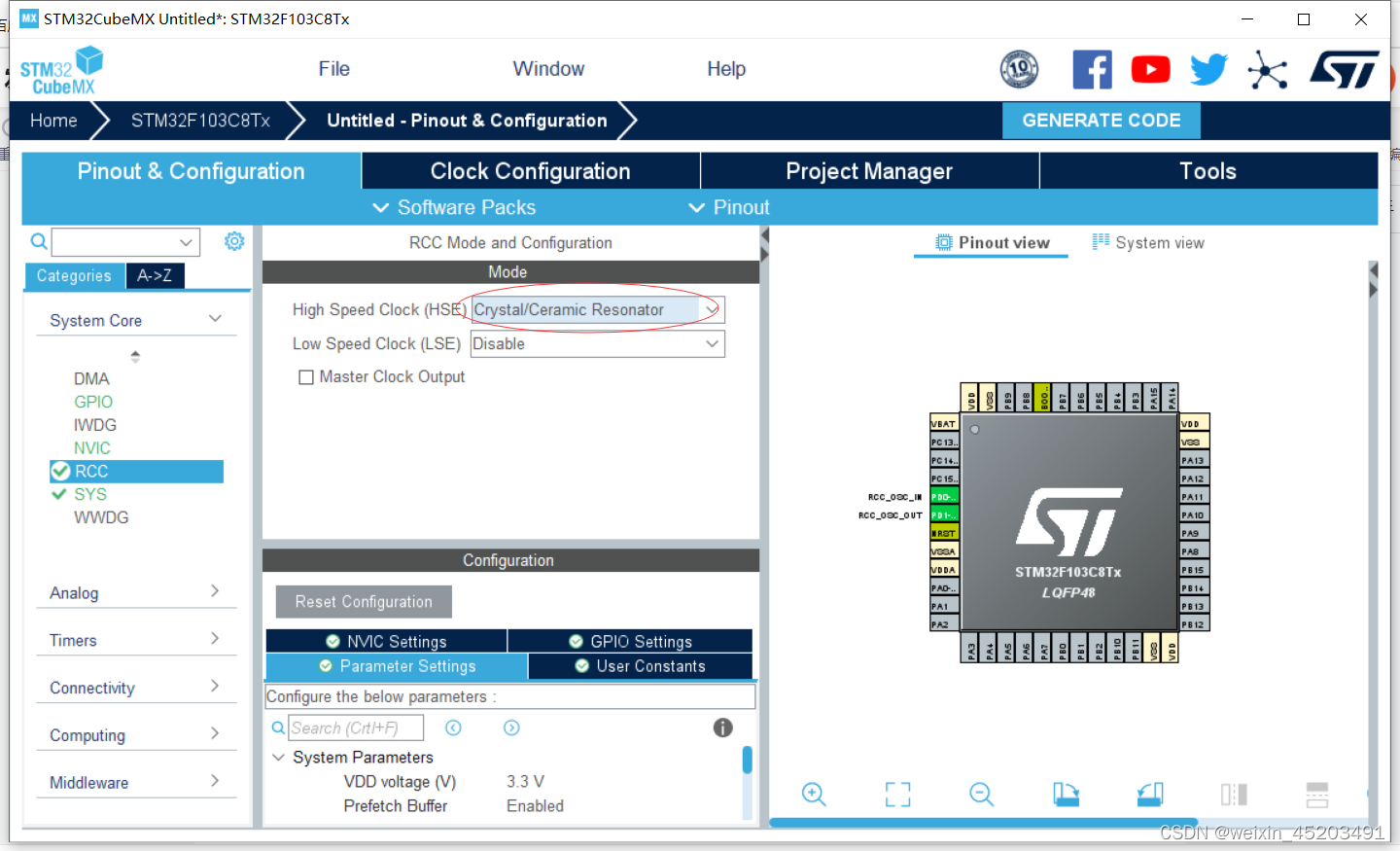
RCC
将hse设置为晶振
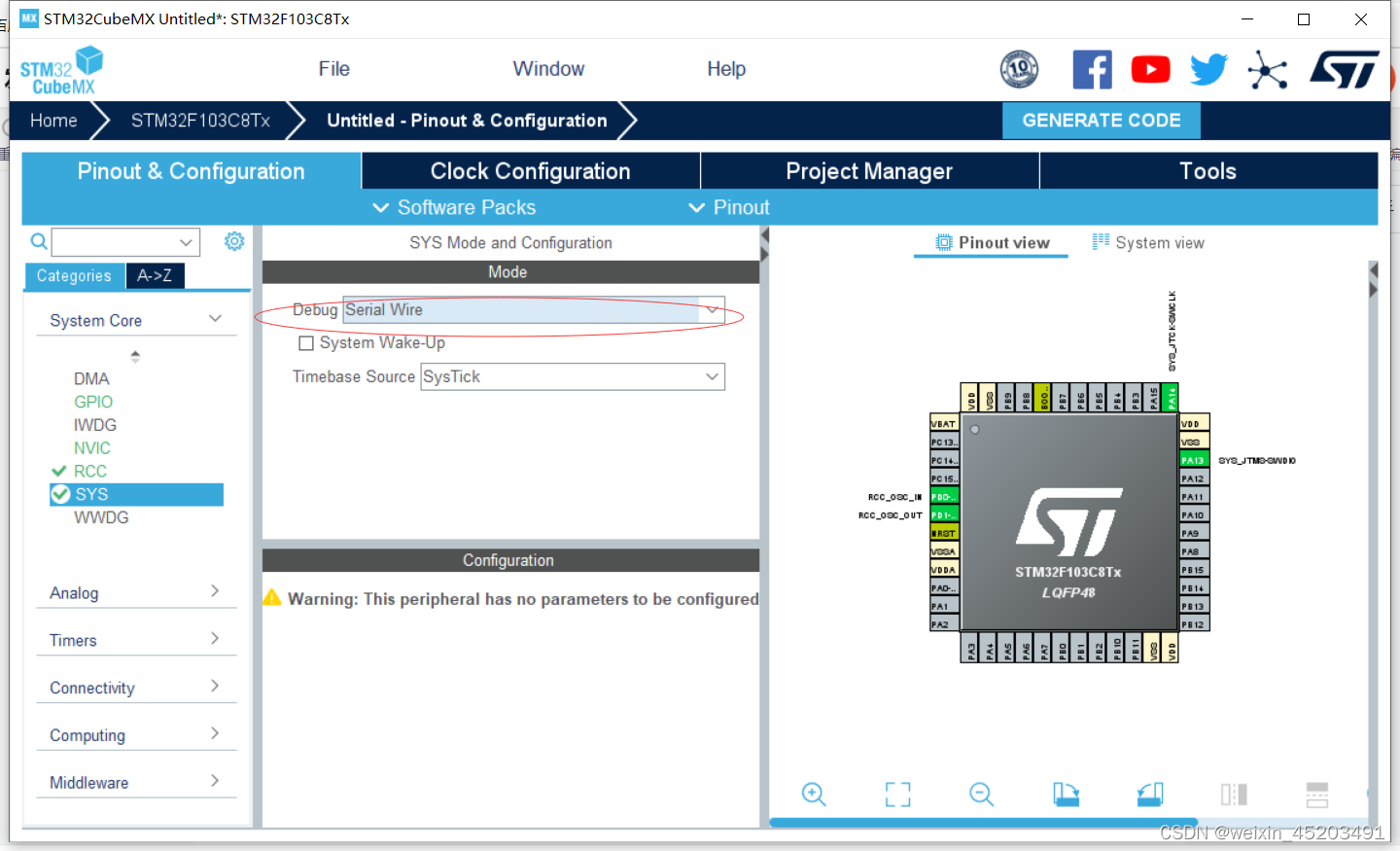
SYS
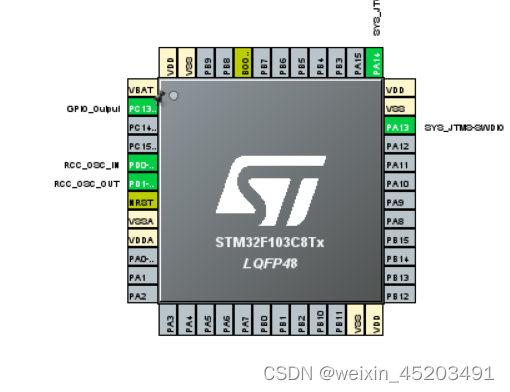
端口配置
设置PC13为GPIO_Output用于点亮LED灯
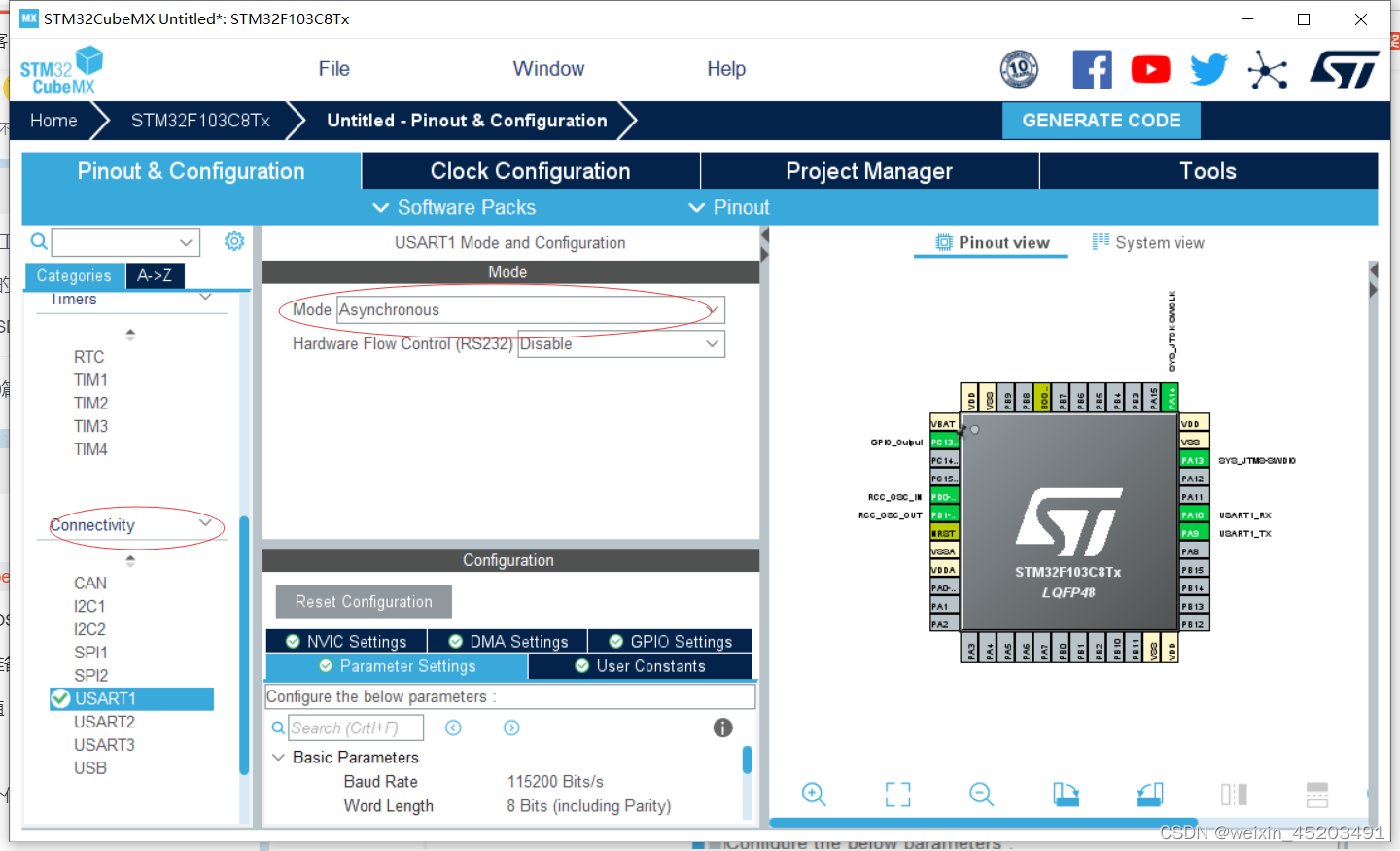
串口配置
USAR1
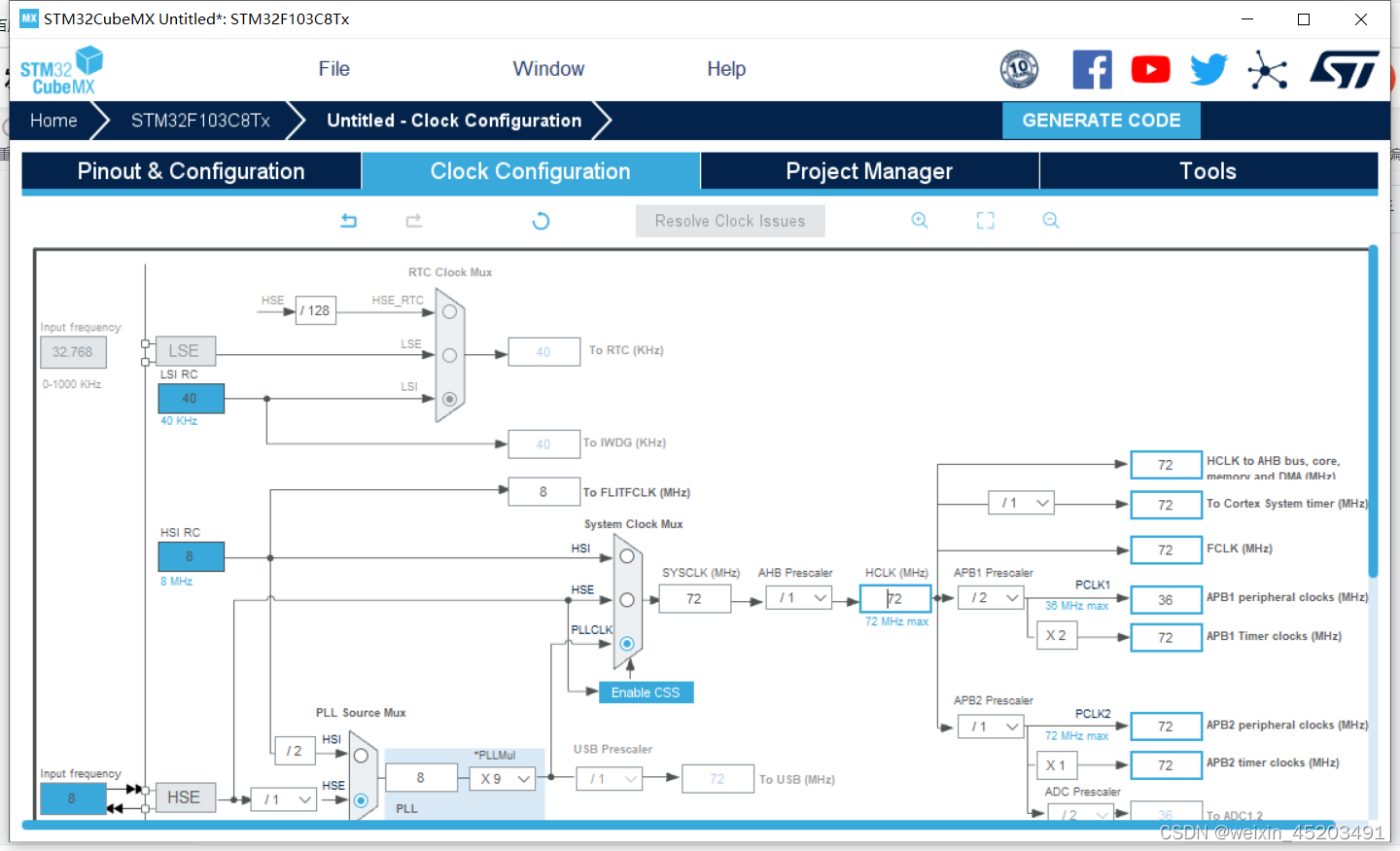
Clock Configuration
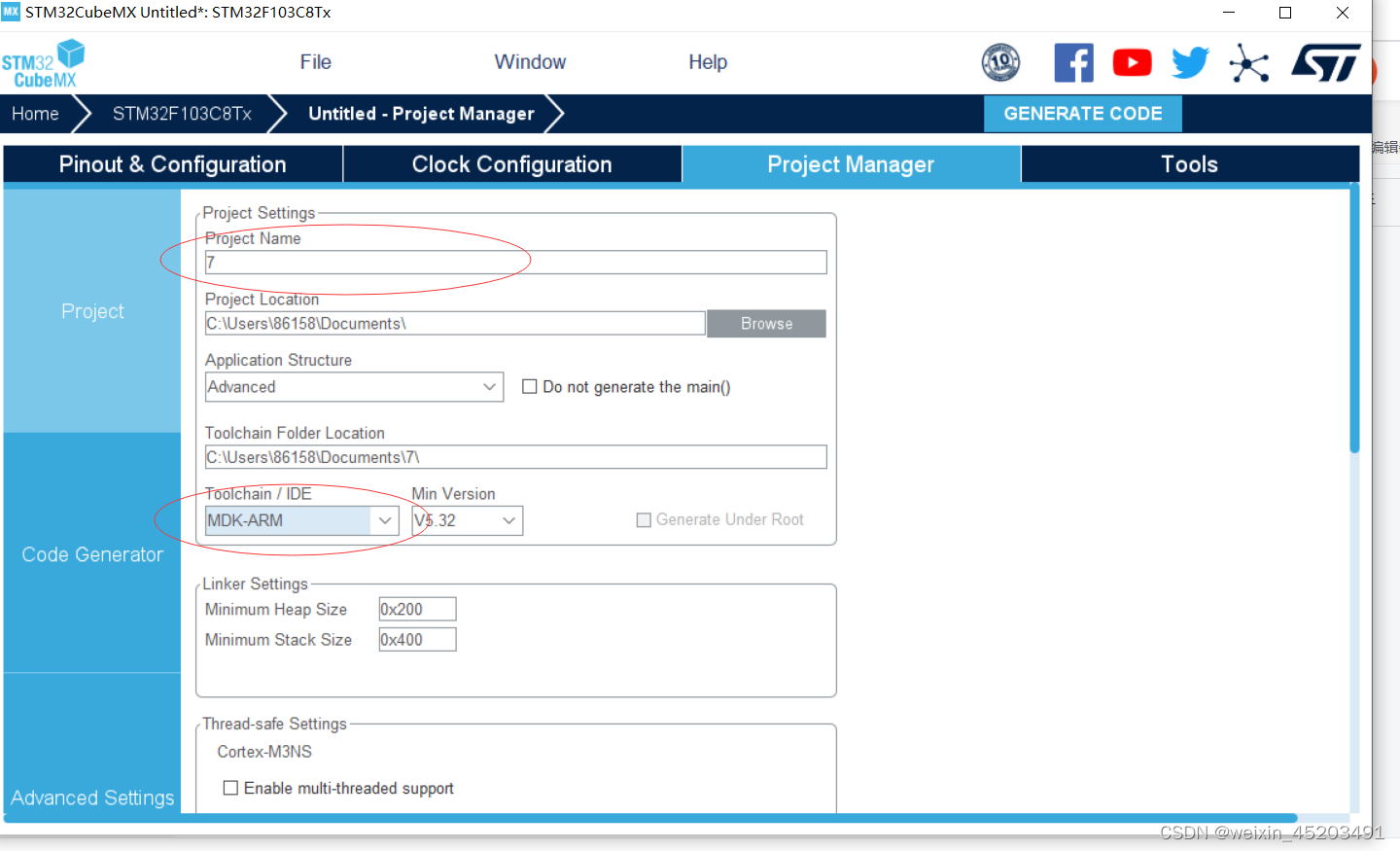
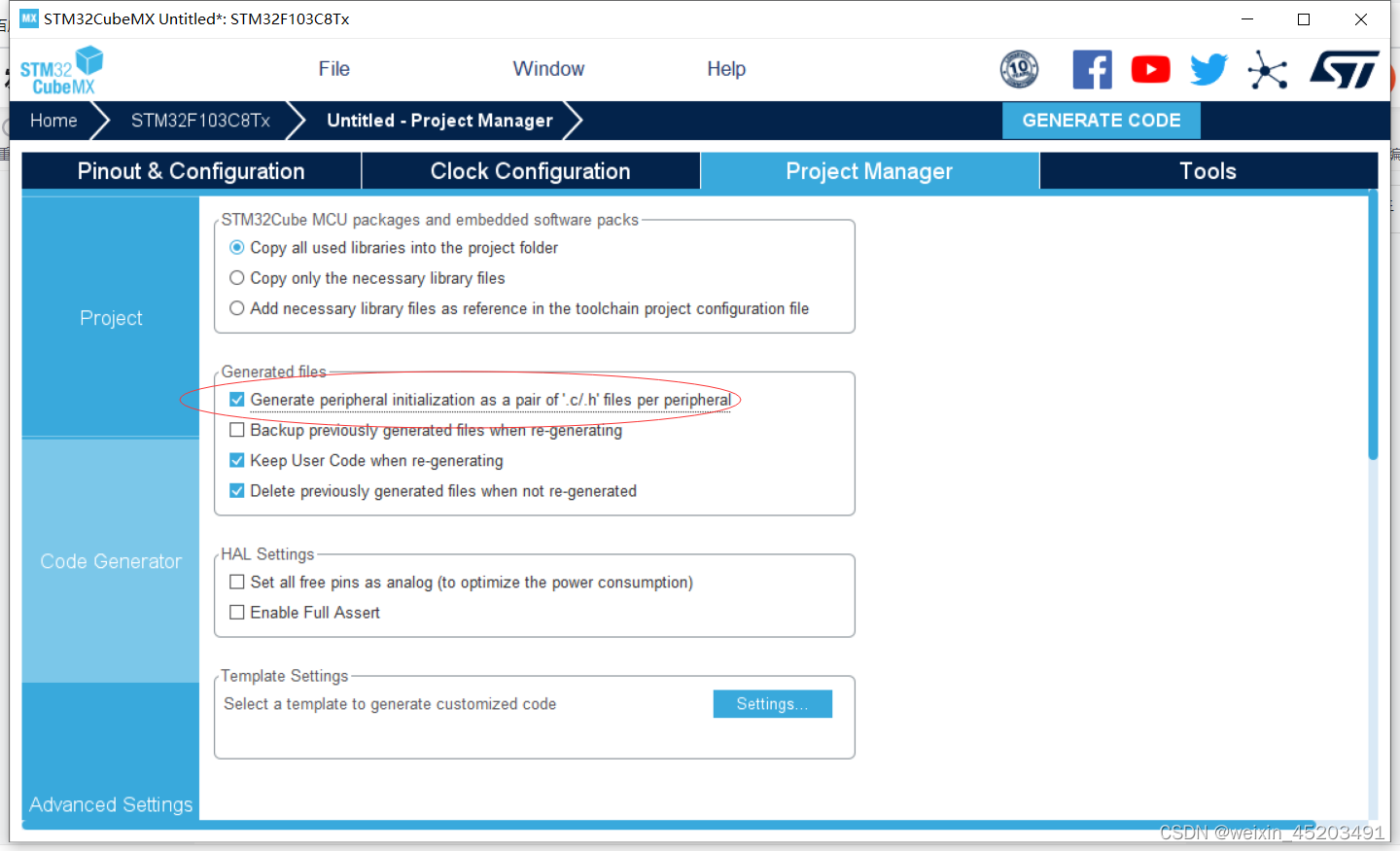
Generate Code
如图设置,生成工程文件
修改工程代码
找到生成的工程文件,使用keli打开
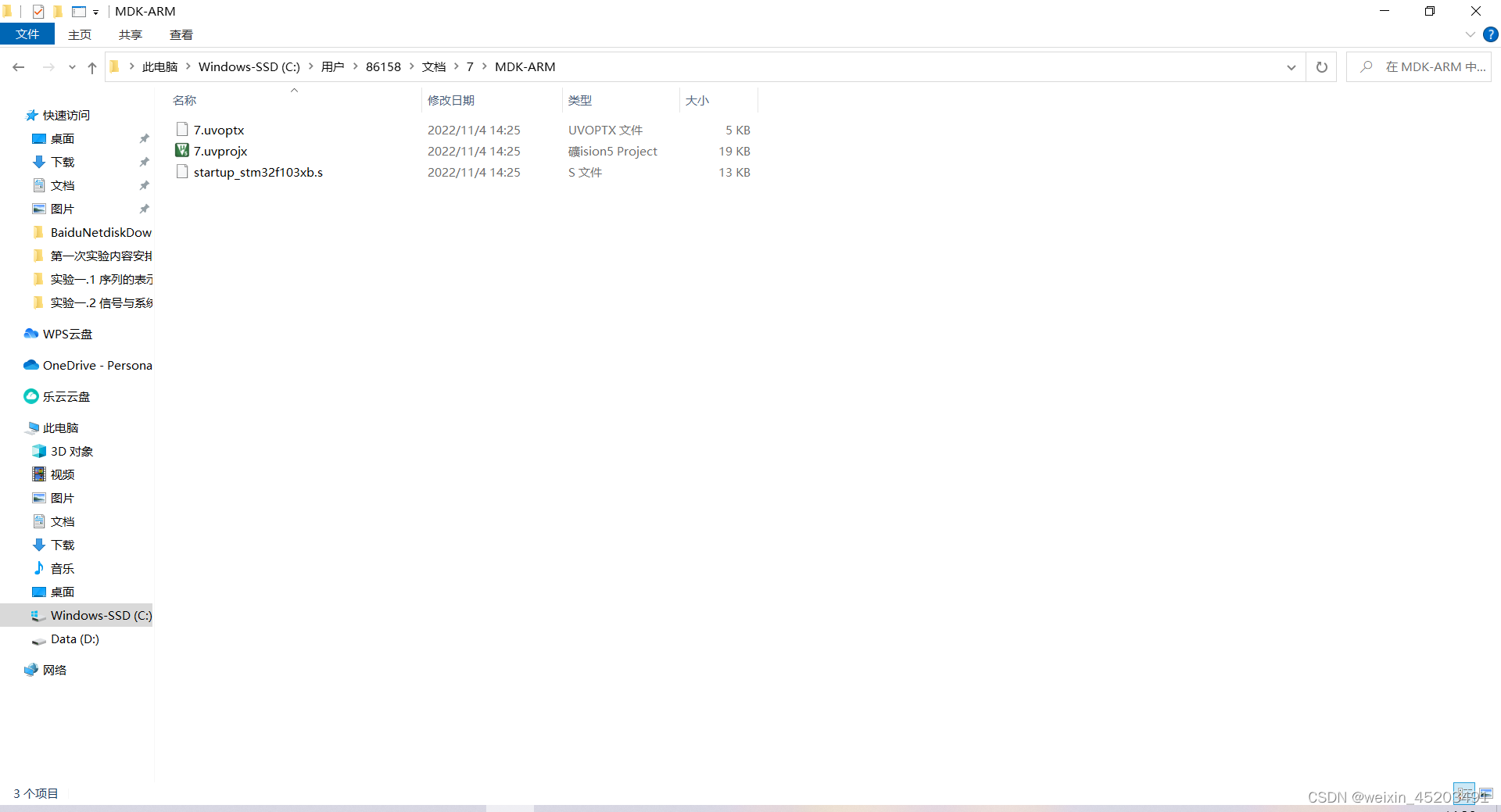
找到main.c,在主程序的while循环中添加如下代码
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_Delay(500);
四、移植uC/OS-III
准备工作
从ucoslll官网中下载源码
http://micrium.com/downloadcenter/
下载完成后自行新建 文件夹uC-BSP和uC-CONFIG
为uC-BSP文件夹新建bsp.c和bsp.h文件
将uCOS相关文件复制到HAL工程的MDK-ARM文件夹下
移植工作
新建文件夹如下

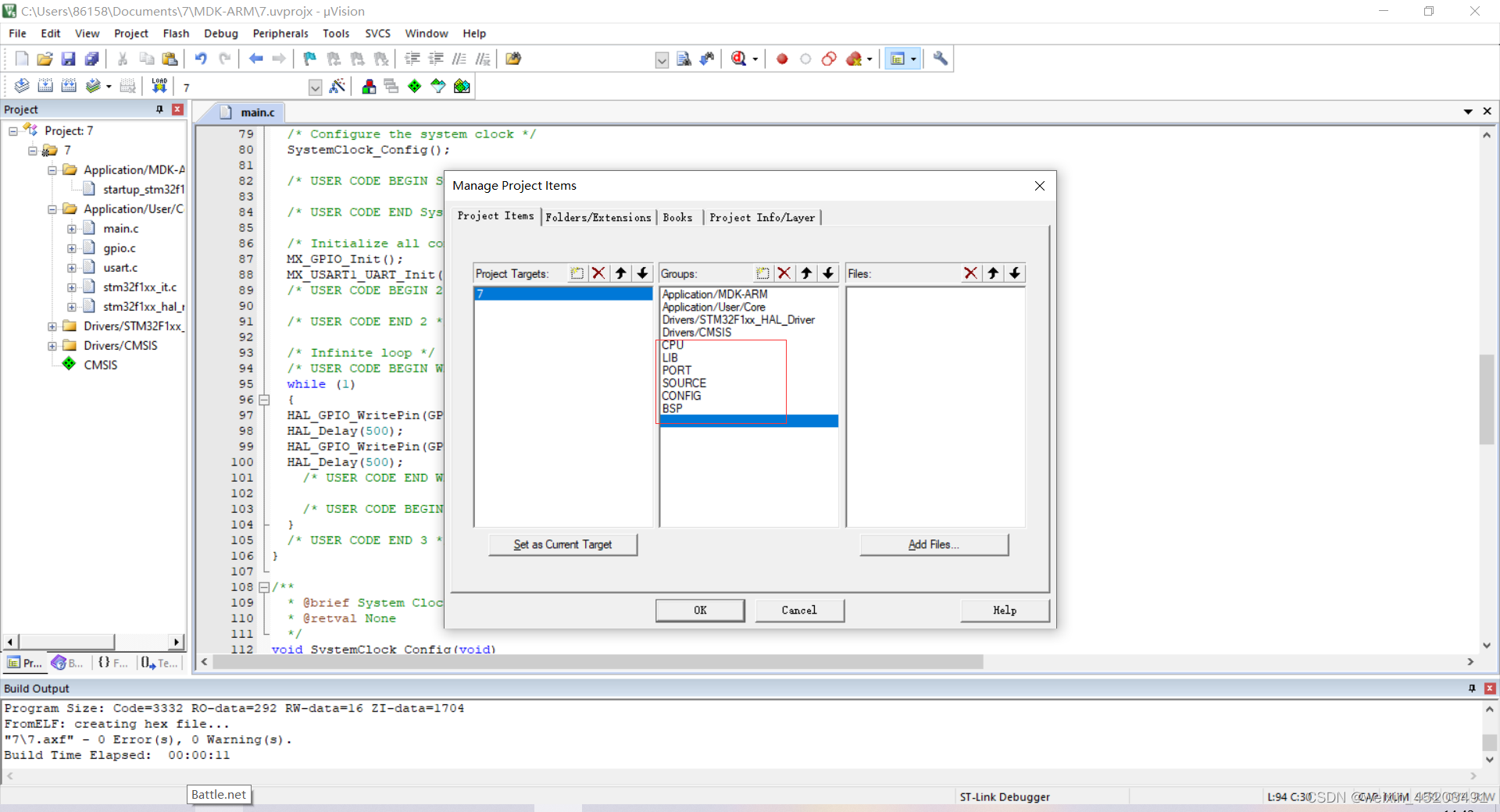
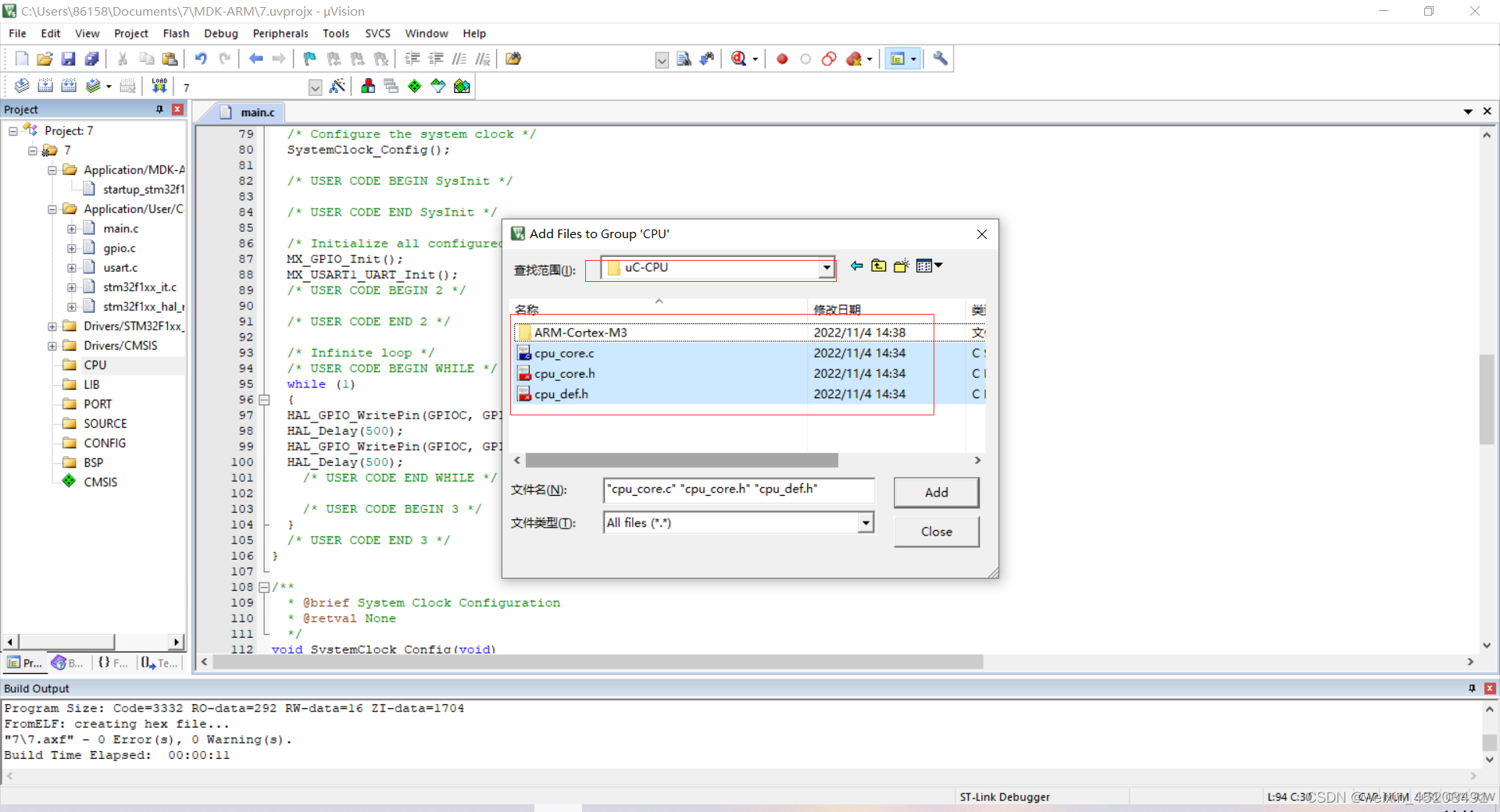
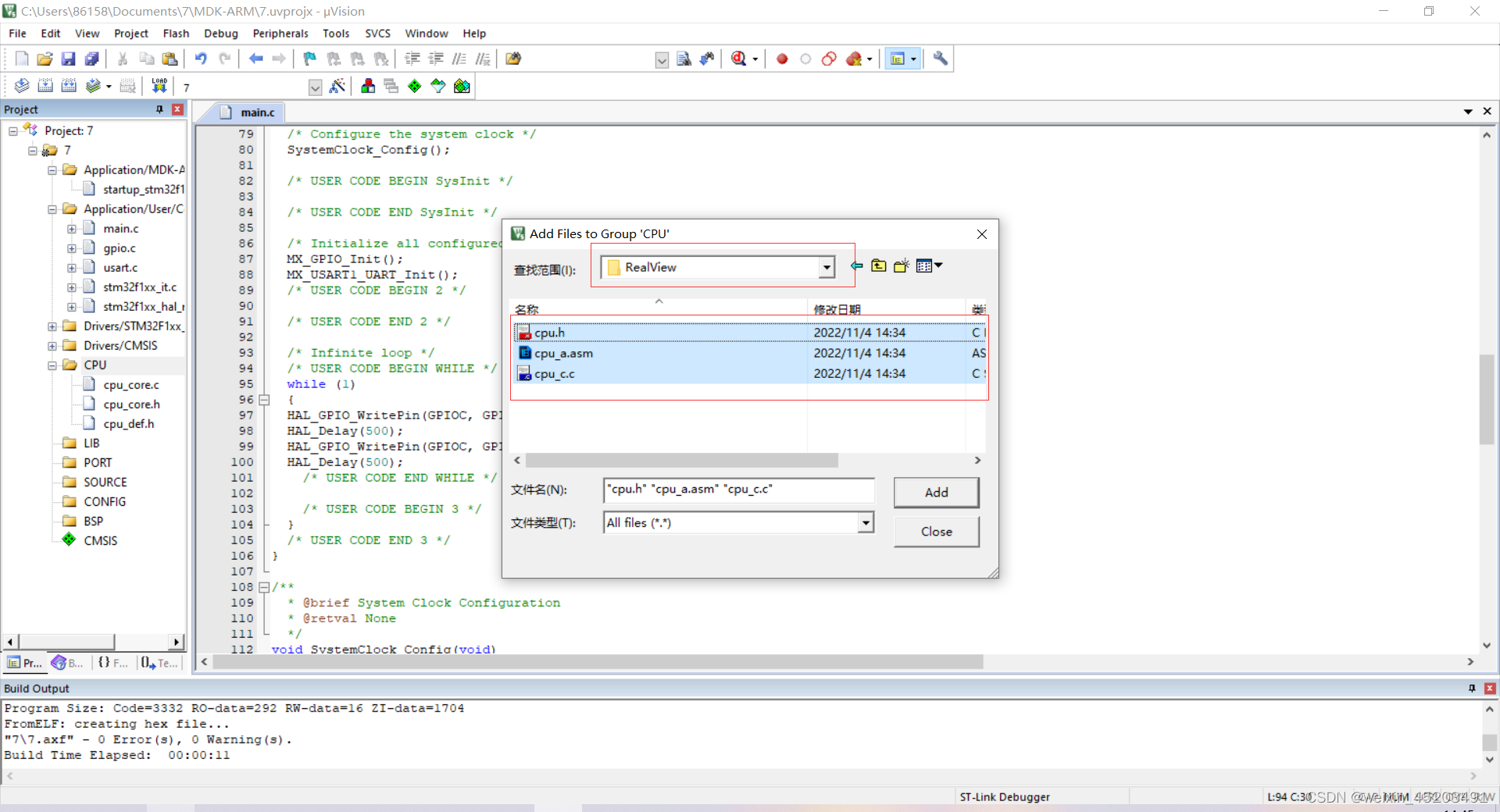
为CPU添加文件
![]()
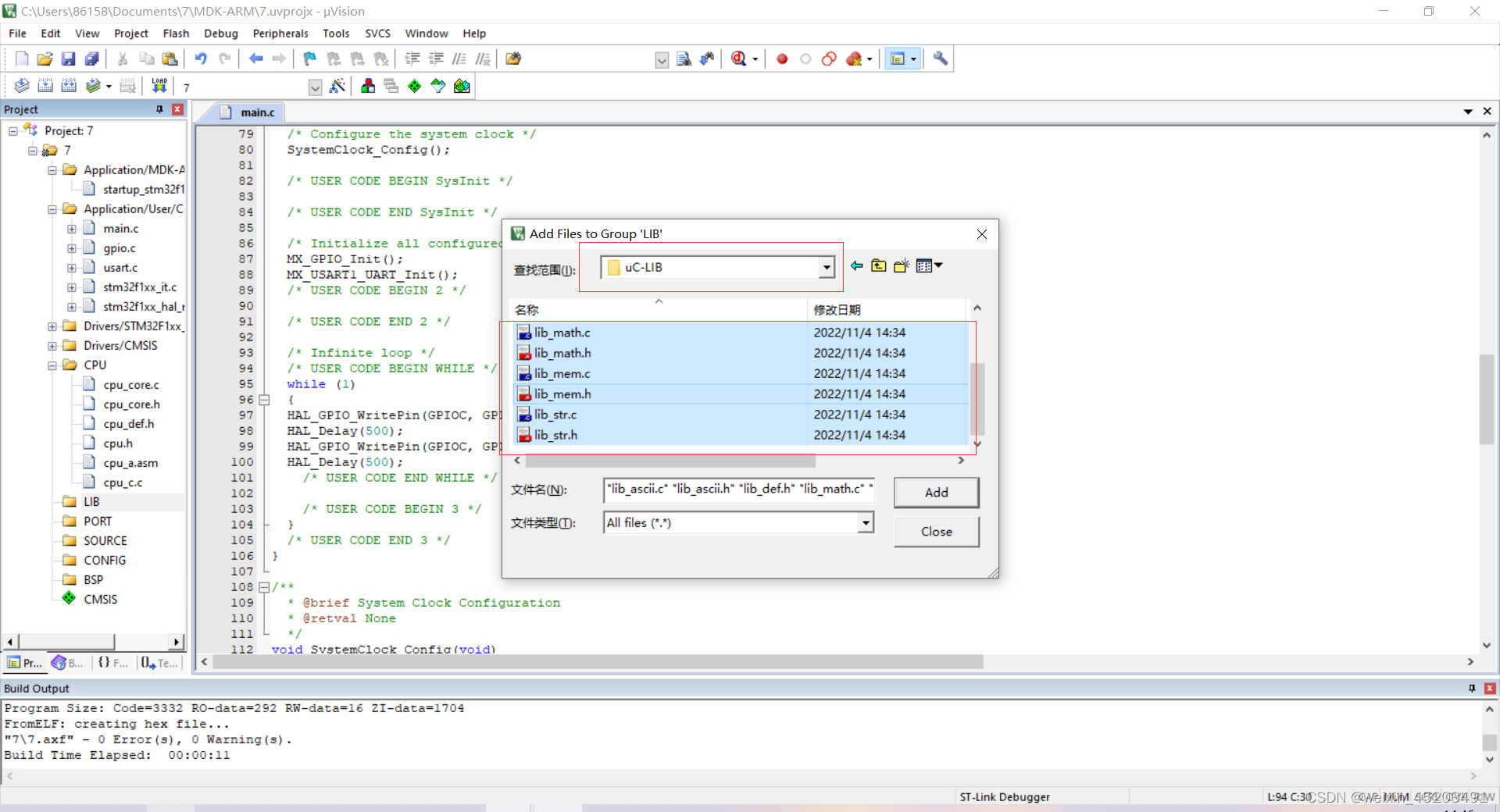
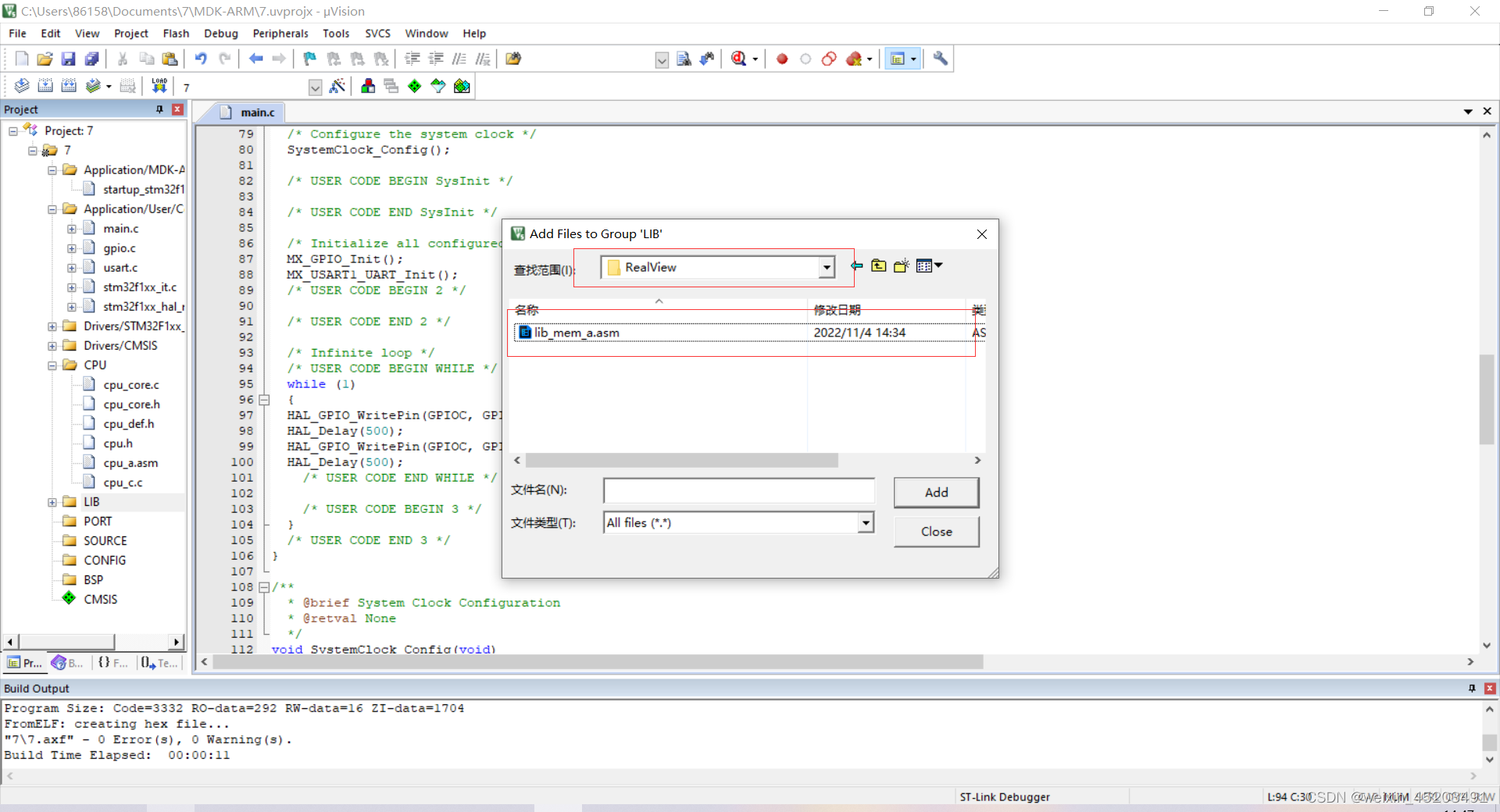
为LIB添加文件

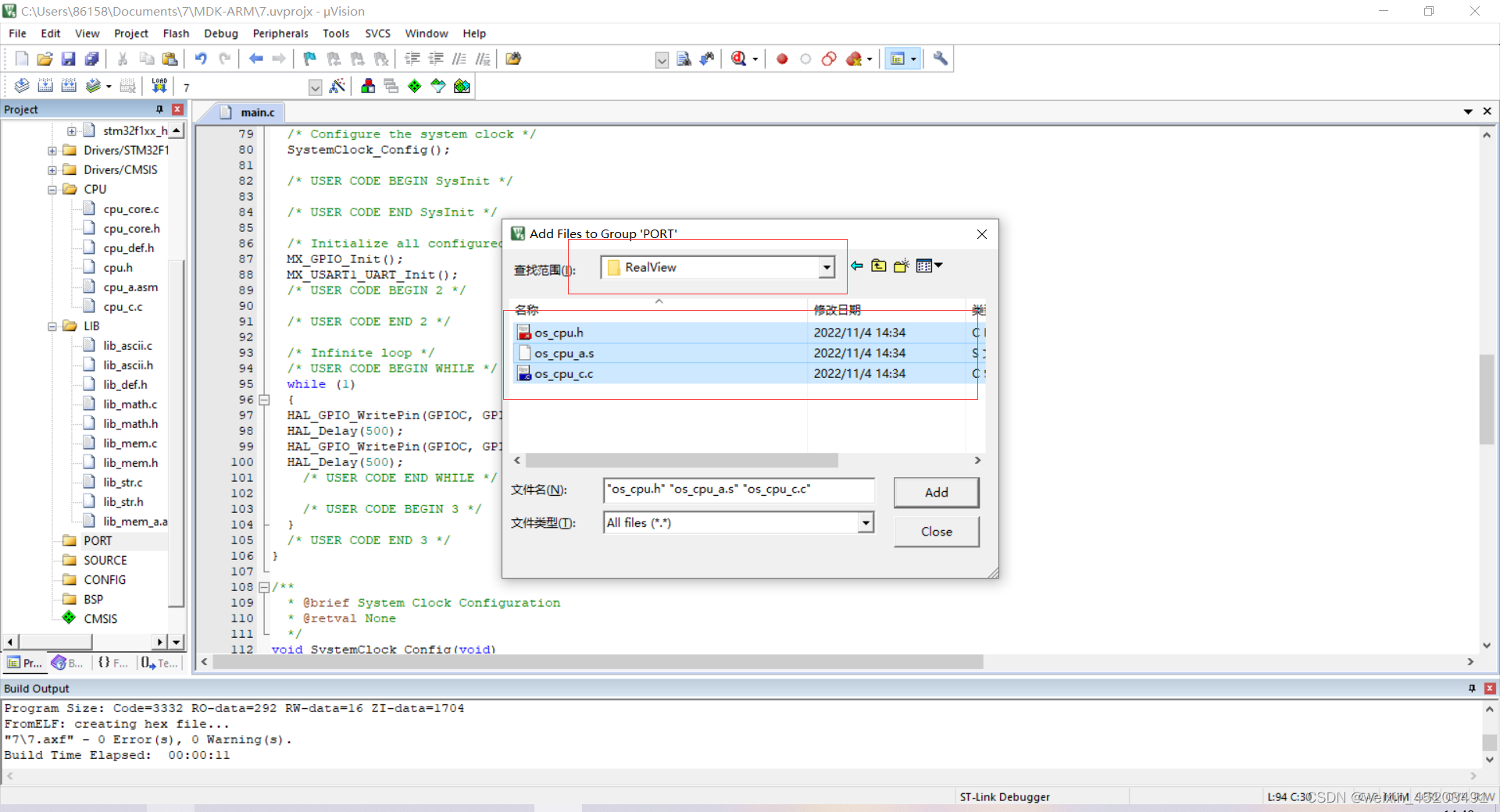
为PORT添加文件
![]()
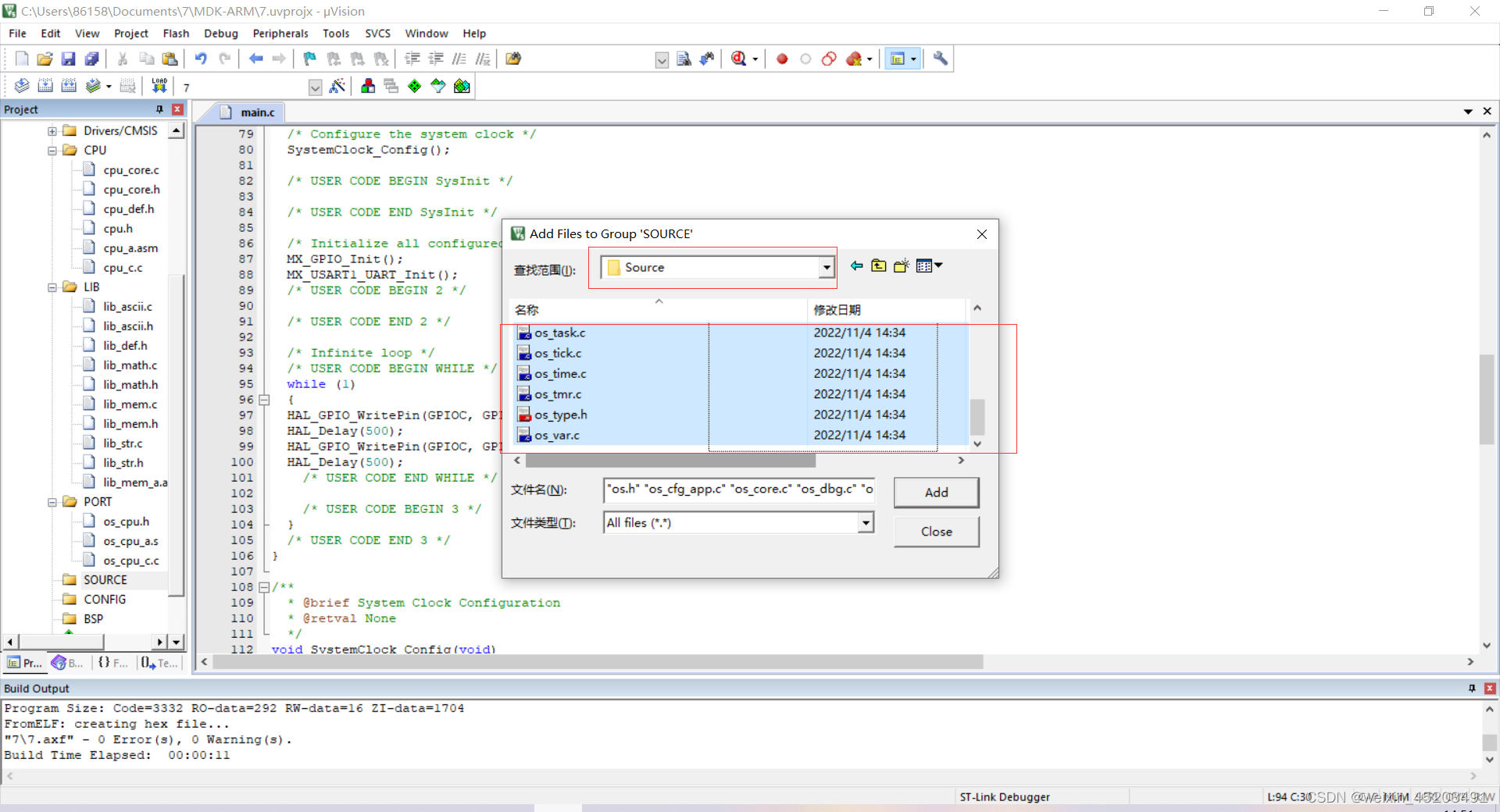
为SOURCE添加文件
![]()
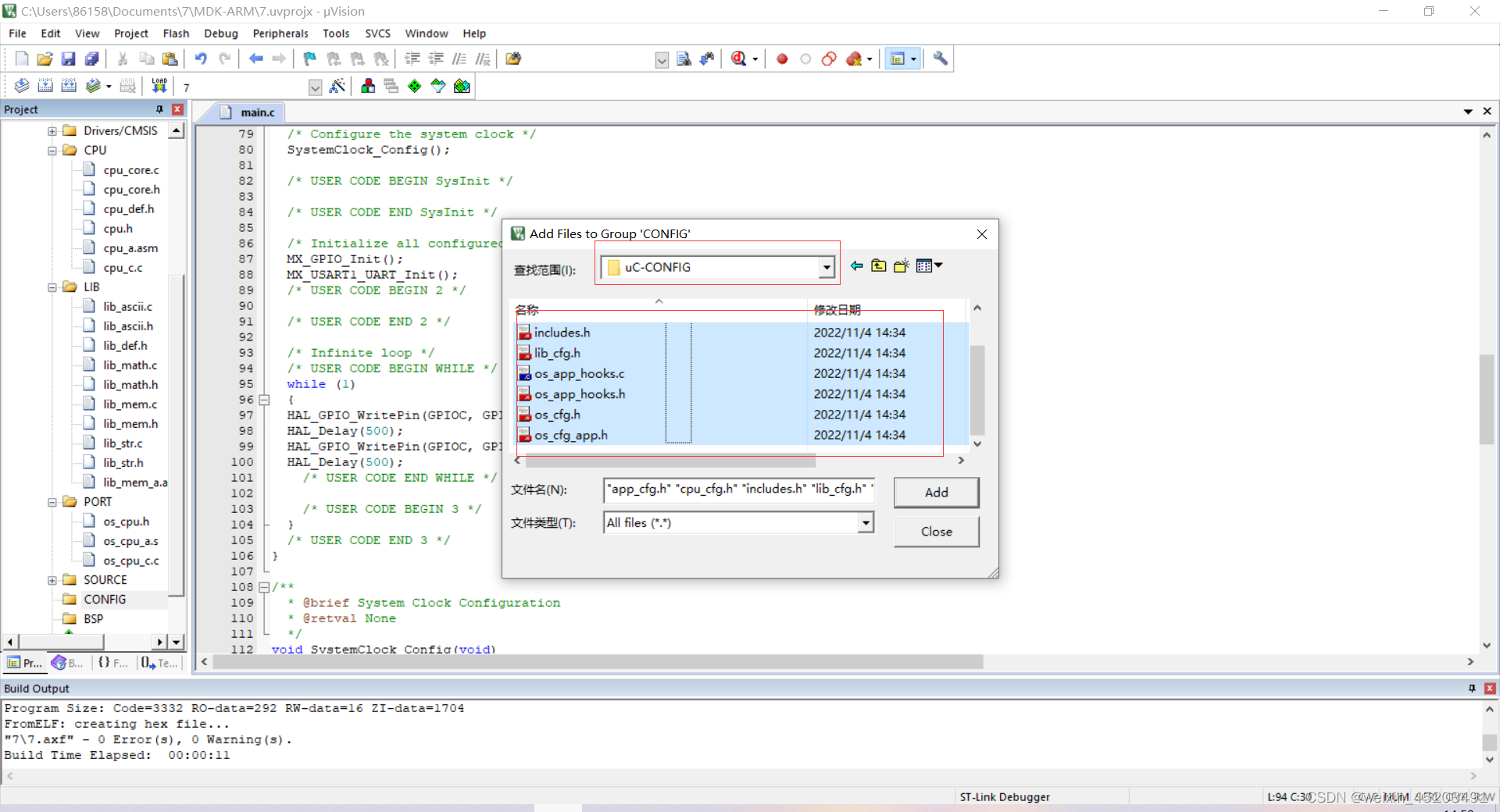
为CONFIG添加文件
![]()
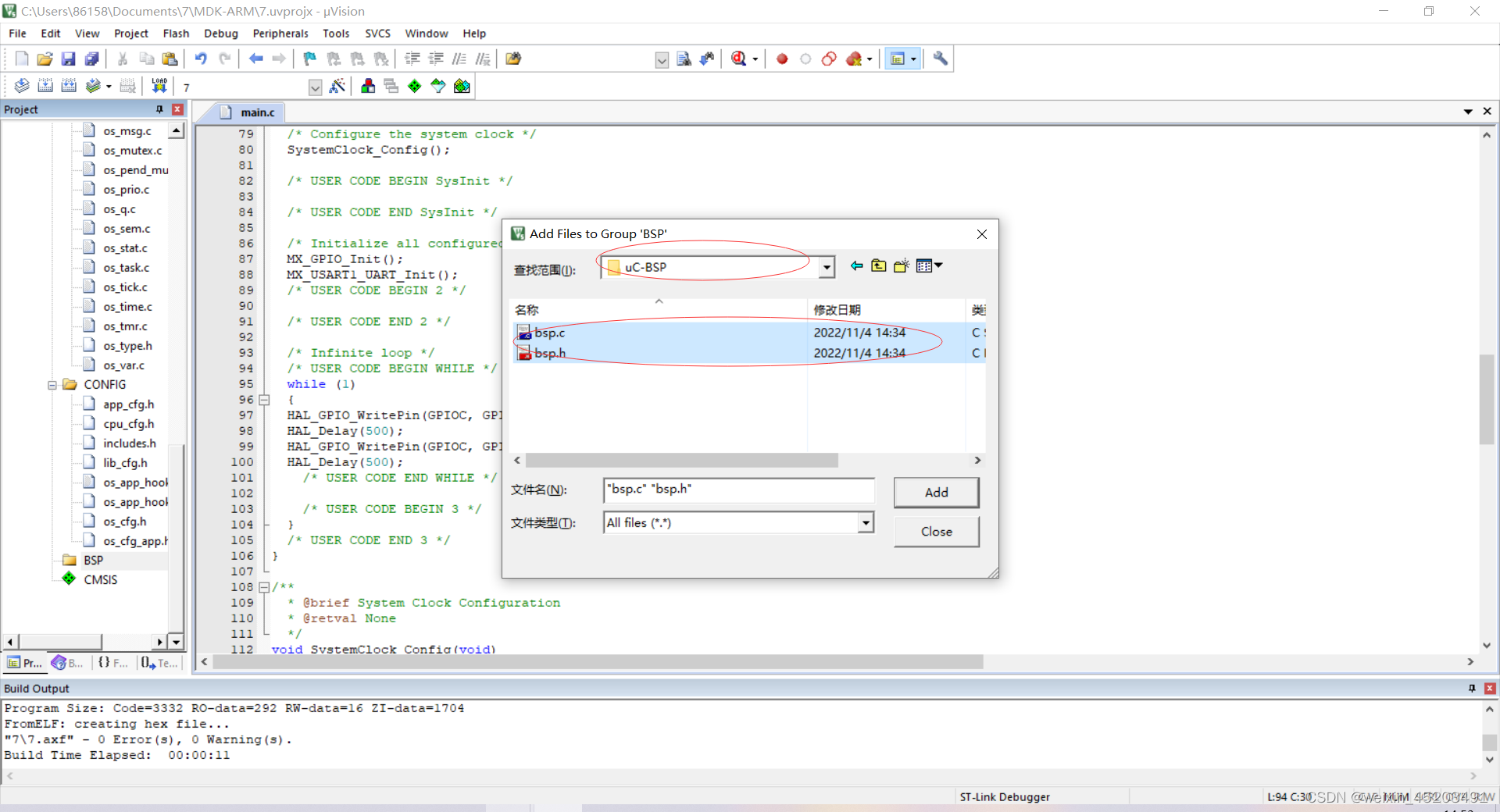
为BSP添加文件

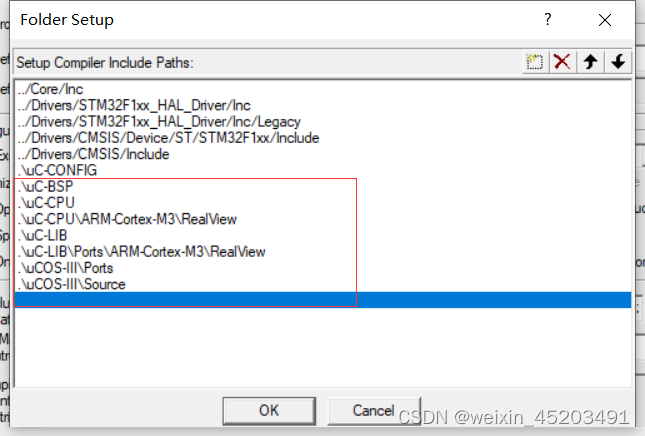
导入文件路径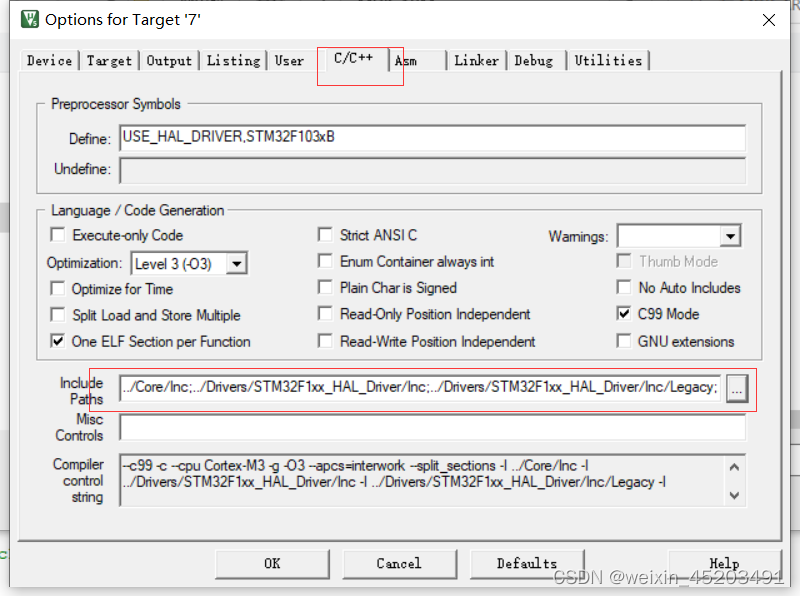
修改代码
bsp.h
// b 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1722
1722


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








