




 本文探讨了一种特殊的算法问题,即从一个包含500个元素的列表中,每次去除位于位置为3的倍数的元素,直到列表剩余4个元素为止。文章提供了两种解决方案,一种使用ArrayList迭代,另一种利用迭代器优化算法,显著降低了时间和空间复杂度。
本文探讨了一种特殊的算法问题,即从一个包含500个元素的列表中,每次去除位于位置为3的倍数的元素,直到列表剩余4个元素为止。文章提供了两种解决方案,一种使用ArrayList迭代,另一种利用迭代器优化算法,显著降低了时间和空间复杂度。
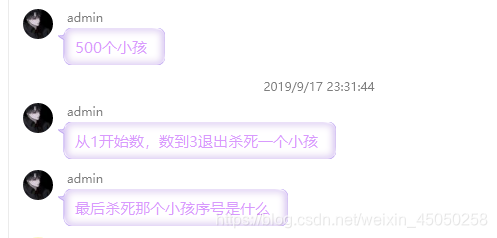
一开始以为是老问题,每次留下位置为:3的倍数的人,问最后一个留下的是几
那很简单,就是求n范围内,3的n次方的max值
仔细一看发现不是
解法①
//自己写个PSVM
/*队列去3问题*/
ArrayList<Integer> originList = new ArrayList<>();
/*获取500个元素的列表*/
for (int i = 1; i < 501; i++) {
originList.add(i);
}
checkThird(originList);
//调用的check方法
private ArrayList<Integer> checkThird(ArrayList<Integer> originList) {
/*建立一个保留第1.第2位元素的列表 */
ArrayList<Integer> removedThirdList = new ArrayList<>();
for (int i = 0; i < originList.size(); i++) {
/*当位数+1有余,则添加进保留列表*/
if ((i+1) %3 != 0) {
removedThirdList.add(originList.get(i));
}
}
/*当保留列表长度位4时,则打印最后的列表内容*/
if (removedThirdList.size() == 4) {
System.out.println(removedThirdList);
return removedThirdList;
}else {
/*否,则继续迭代*/
System.out.println(removedThirdList);
return checkThird(removedThirdList);
}
}
}
其实算法并不优
因为不会用迭代器,于是查了下api
解法②
private ArrayList<Integer> checkThirdV2(ArrayList<Integer> originList) {
//获取迭代器
Iterator<Integer> iterator = originList.iterator();
//标记一个flag,初始位1
int i = 1;
//进行遍历
while (iterator.hasNext()){
//当有next元素时,指针后移
iterator.next();
//当flag除3无余,则删除该元素
if ((i%3) == 0) {
iterator.remove();
}
i++;
}
//当删减后的列表长度为4,则得到想要的结果列表
if (originList.size()==4){
System.out.println(originList);
return originList;
//否,则继续迭代
}else return checkThirdV2(originList);
}
时间复杂度减少到o的n
空间减少到n
迭代器这个时候还是挺好用的.

















 61
61

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









