




 本文介绍了一种使用p5.js实现跟随鼠标移动并逐渐消亡的气泡效果,详细讲解了向量操作、气泡生命周期设计及代码实现过程。
本文介绍了一种使用p5.js实现跟随鼠标移动并逐渐消亡的气泡效果,详细讲解了向量操作、气泡生命周期设计及代码实现过程。
Part1 实现效果以及扩展
Part2 向量
《代码本色》参考实例:
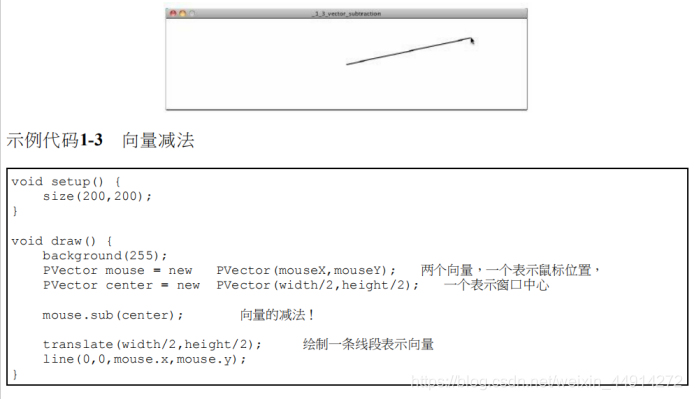
1、向量的减法(用于计算鼠标点和气泡位置的差值,得出加速度)
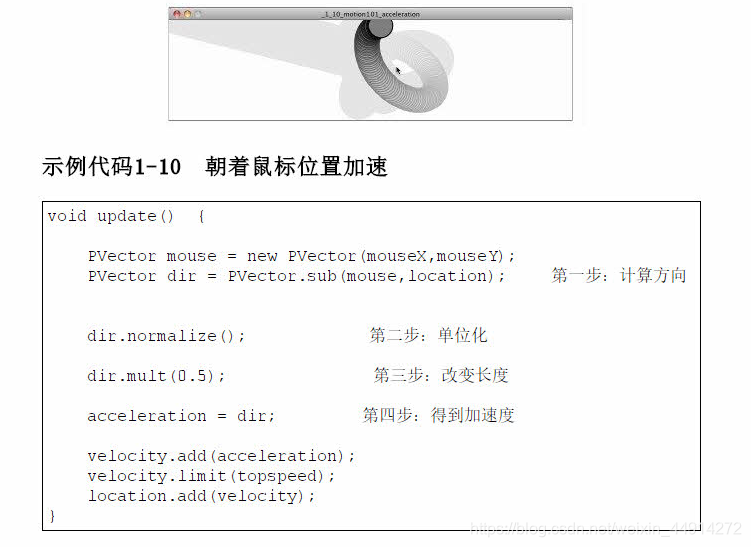
2、朝鼠标位置移动
Part3 跟随鼠标的消亡气泡
设计思路:
①在画布范围随机位置生成气泡,初速度一定范围内随机,加速度为0;
②气泡跟随鼠标位置移动,即新加速度=鼠标位置-气泡原本位置;
③给气泡生命周期,即让气泡颜色随帧数淡化;
Part4 代码展示
var movers = [];
function setup() {
createCanvas(windowWidth, windowHeight);
colorMode(HSB, 360, 100, 100, 300);
}
function draw() {
background(0);
movers.push(new Mover(createVector(random(width), random(height))));
for (var i = 0; i <movers.length; i++) {
movers[i].update();
movers[i].display();
if (movers[i].isDead()) {
movers.splice(i, 1); //如果气泡死亡,则从数组里移除该气泡
}
}
}
function Mover(pos) {
var position = pos.copy();
var velocity = createVector(random(-10, 10), random(-2, 2));
var acceleration = createVector(0,0);
var lifespan = 255;
var H = random(360);
var size = random(25, 50);
var maxspeed=2.5;
this.update = function() {
var mouse = createVector(mouseX,mouseY);
acceleration = p5.Vector.sub(mouse,position);
//acceleration.setMag(1);
acceleration.normalize();
acceleration.mult(0.2);
velocity.add(acceleration);
velocity.limit(maxspeed);
position.add(velocity);
lifespan -= 2;
}
this.display = function() {
stroke(H, 90, 60, lifespan);
strokeWeight(1);
fill(H, 90, 50, lifespan);
ellipse(position.x, position.y, size, size);
}
this.isDead = function() {
if (lifespan < 0) {
return true;
} else {
return false;
}
}
}

















 1283
1283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









