






第一章 CAN硬件电路
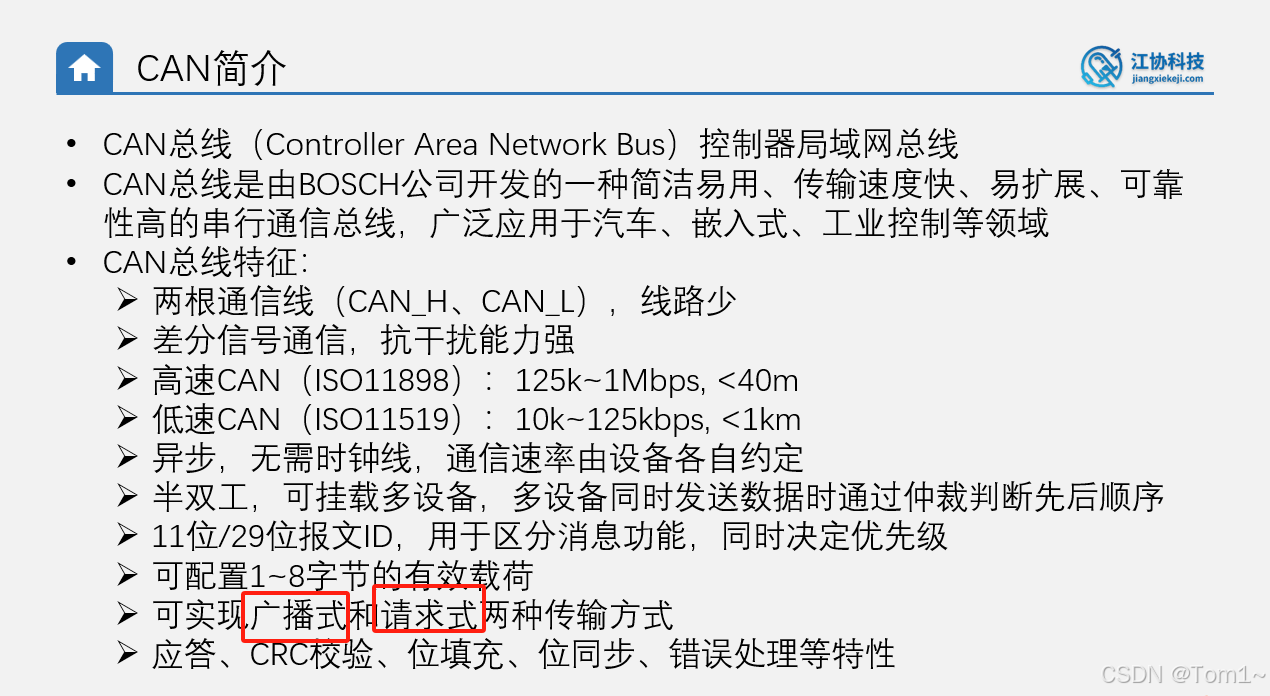
请求式:数据发送方不会主动广播自己的数据,而是只有收到接收方发出的请求,发送方才会发送数据。这样一个数据传输就需要先请求、再接收,一来一回两个过程。
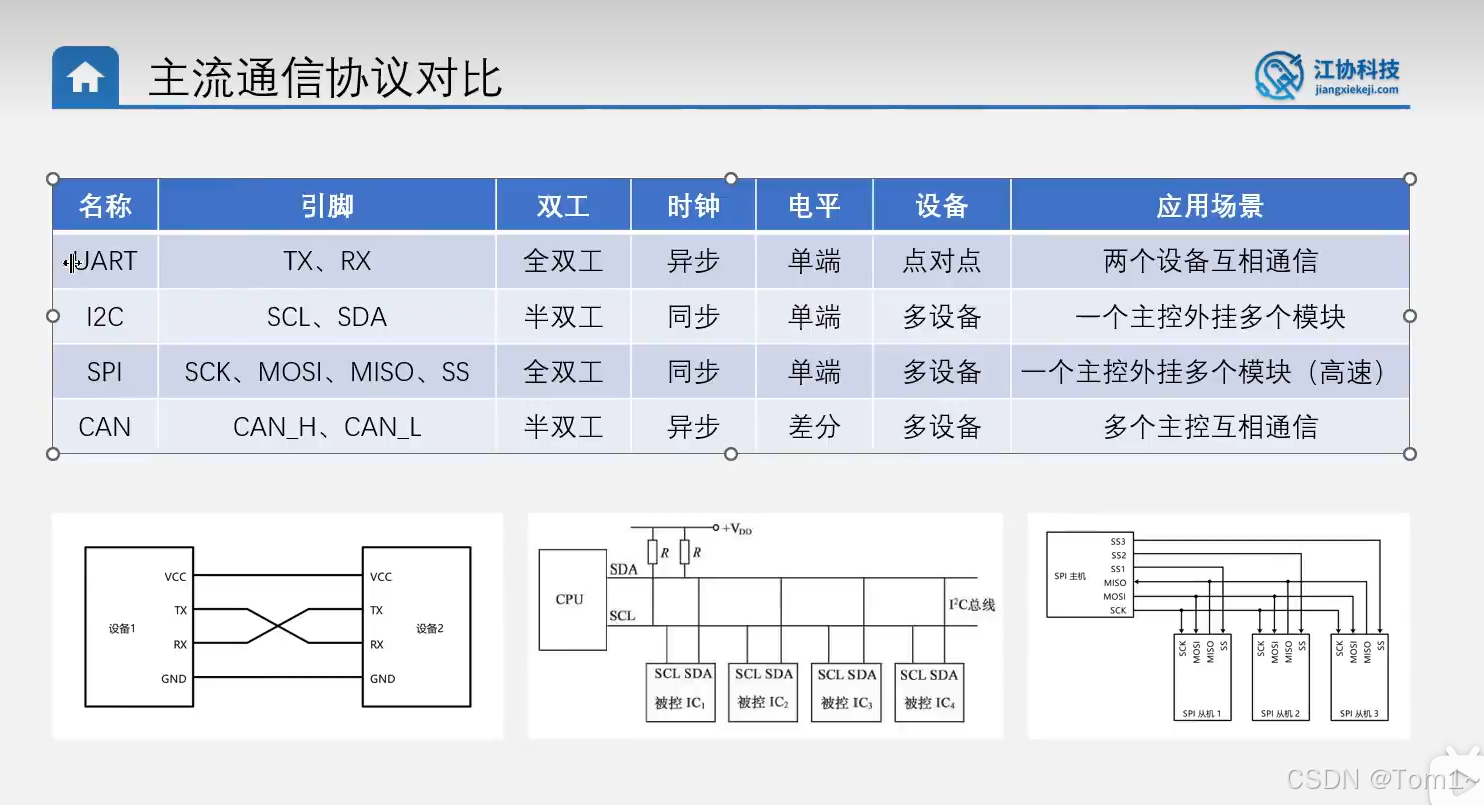
应用场景:能实现多个主控之间的通信(大家都是主机)。
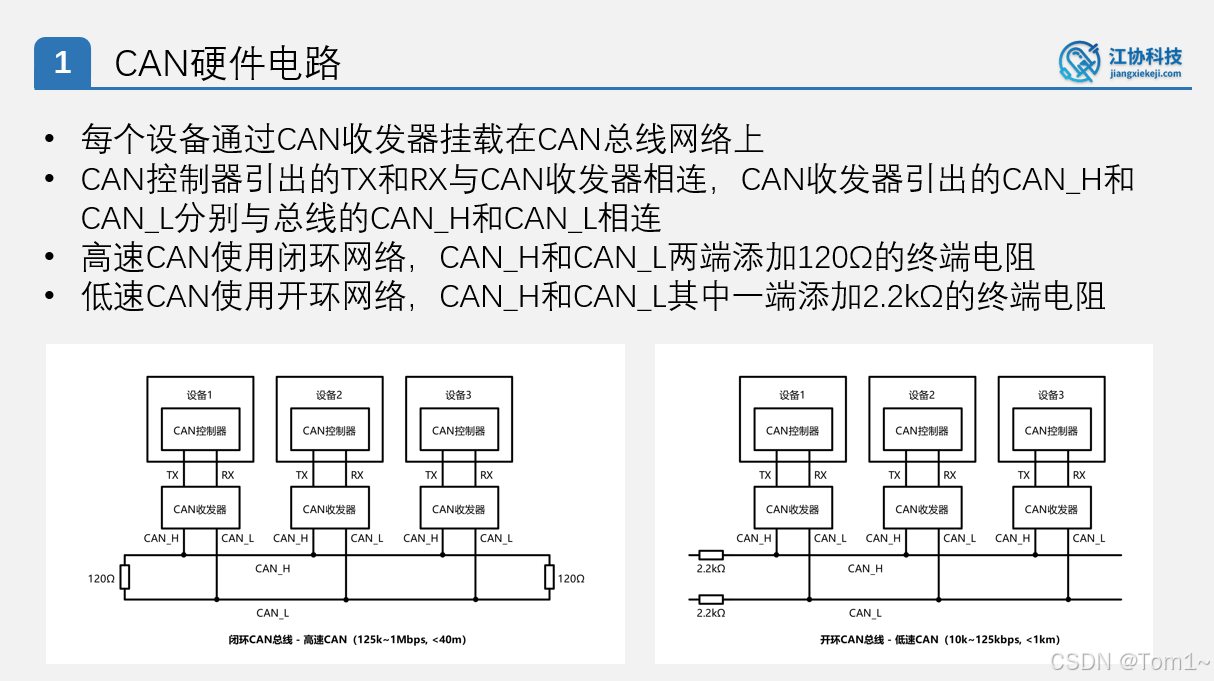
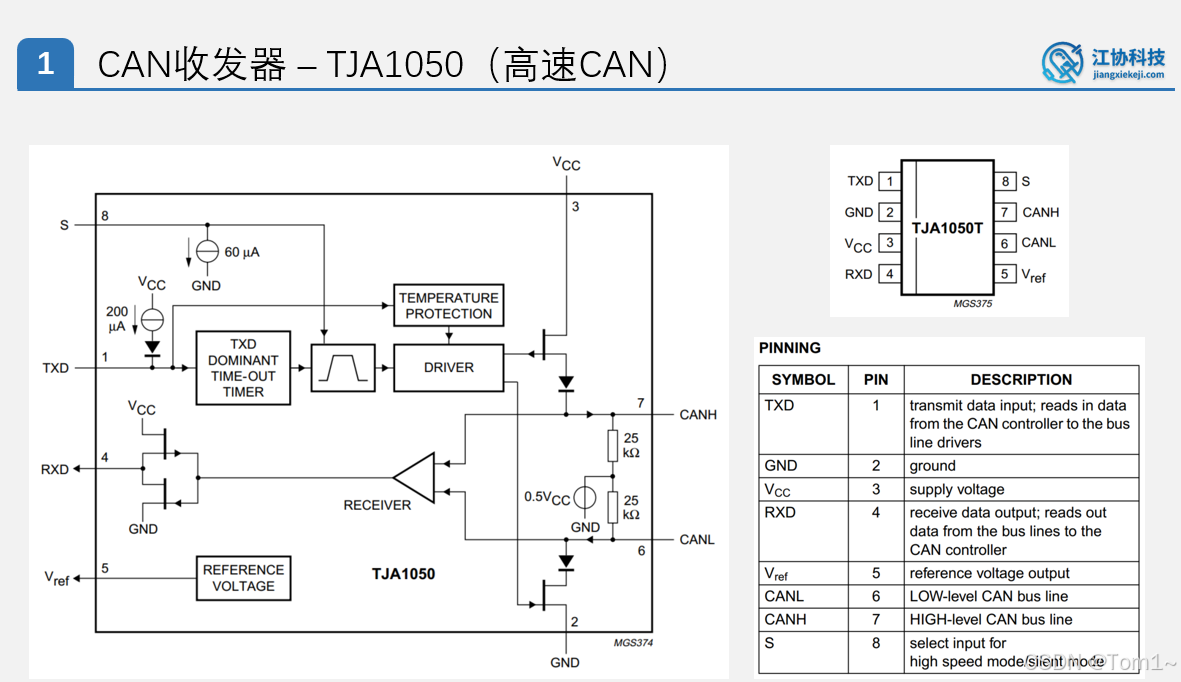
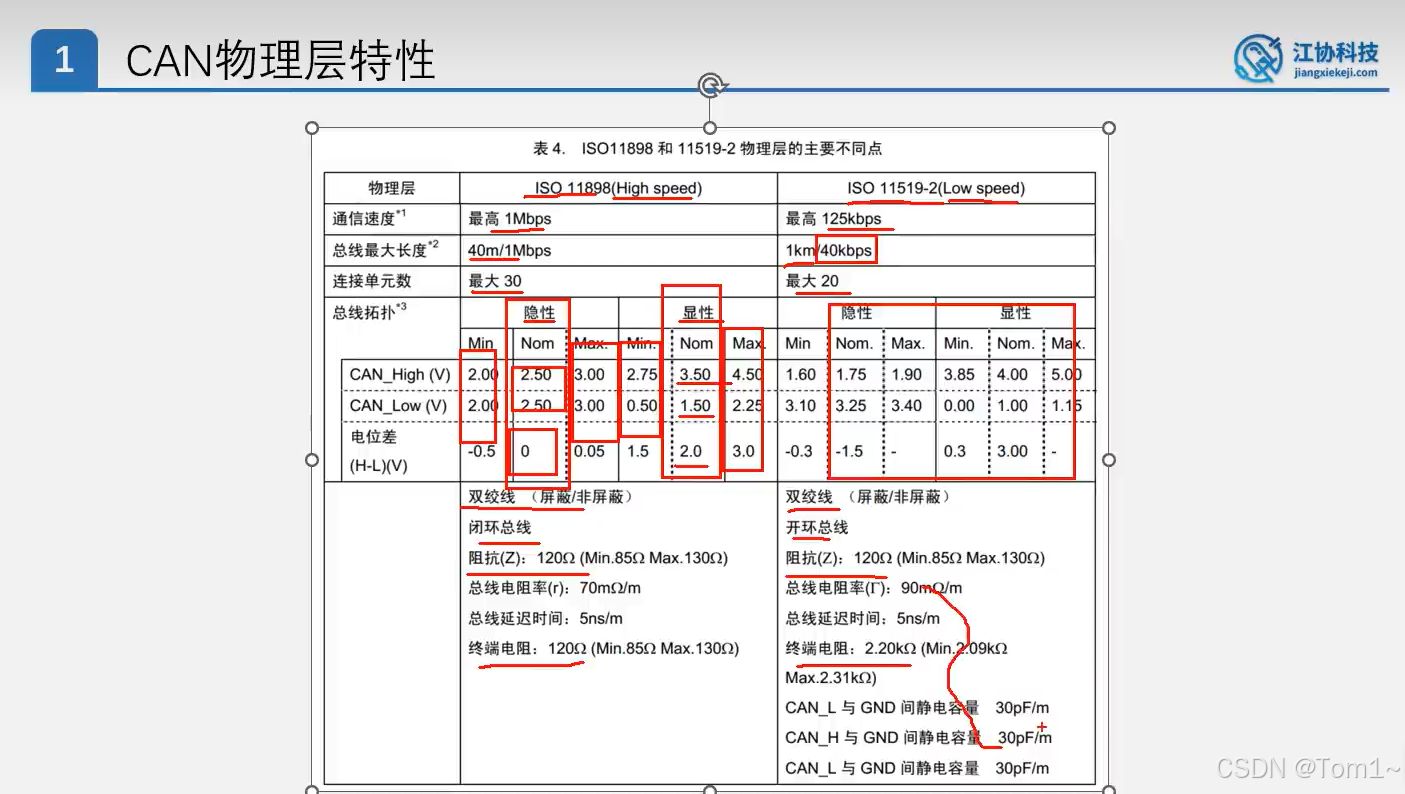
注意:CAN接收器的TX接CAN控制器的TX,CAN接收器的RX接CAN控制器的RX。高速CAN中终端电阻的作用是(1)防止回波反射;(2)在没有设备操作时,将两根差分线的电压“收紧”,使其电压一致。“收紧”的意思是在没有设备操作总线的情况下,该电阻就像“弹簧”一样将两根线的电压拉到同一水平。低速CAN中终端电阻的作用是(1)防止回波反射;
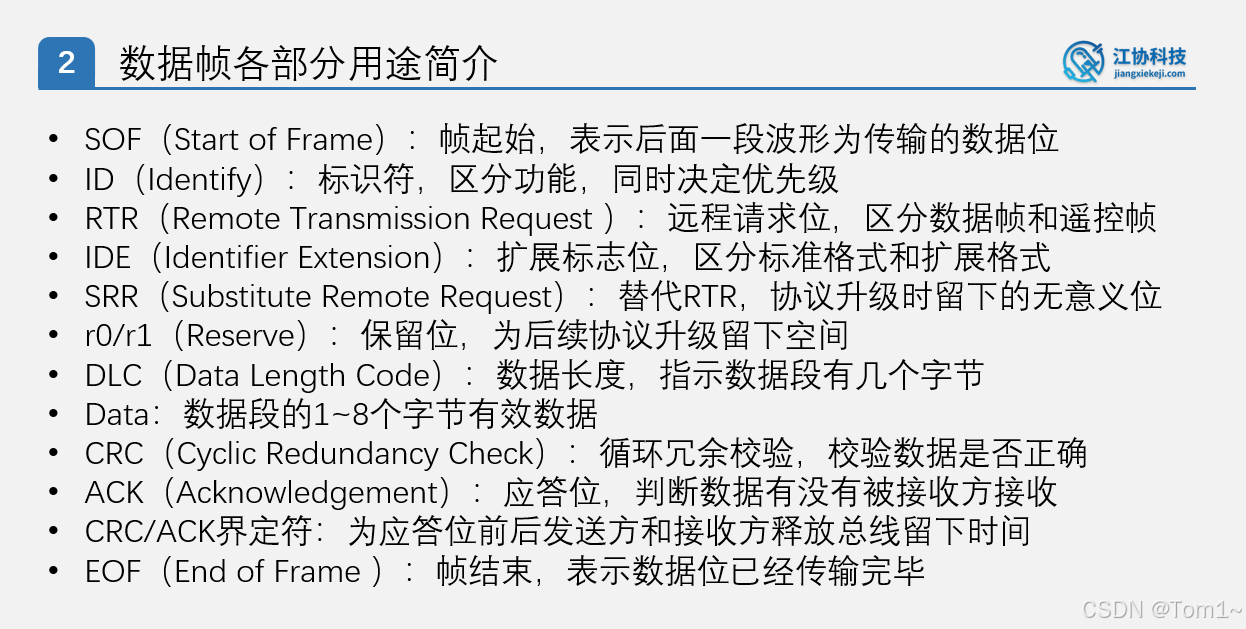
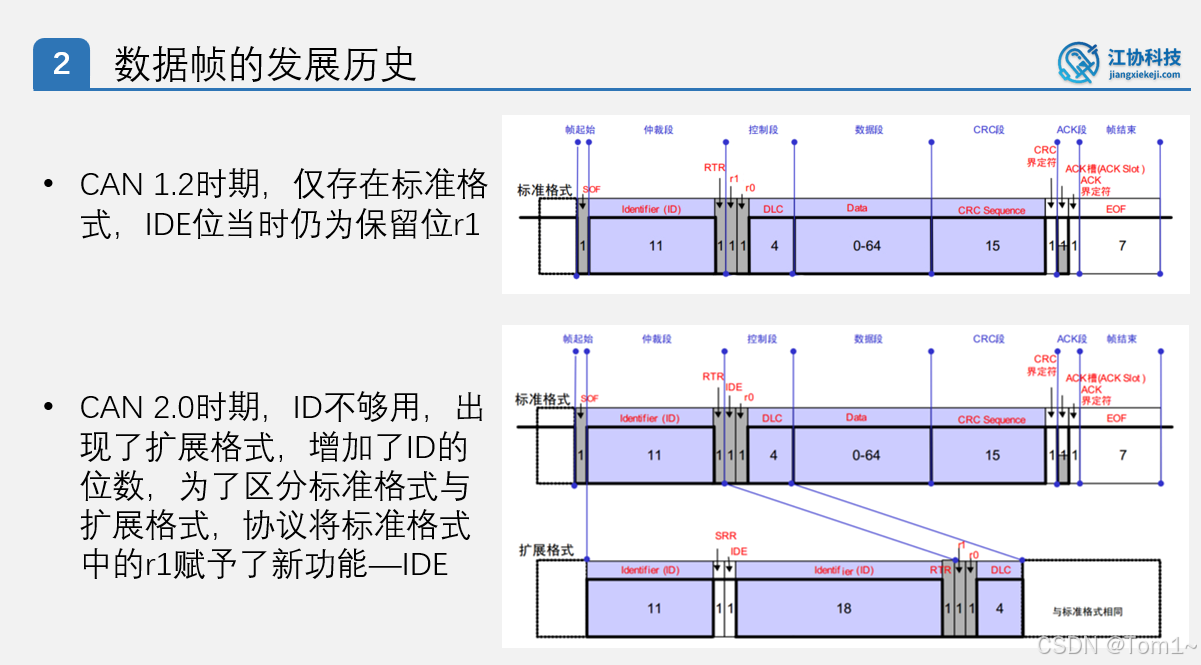
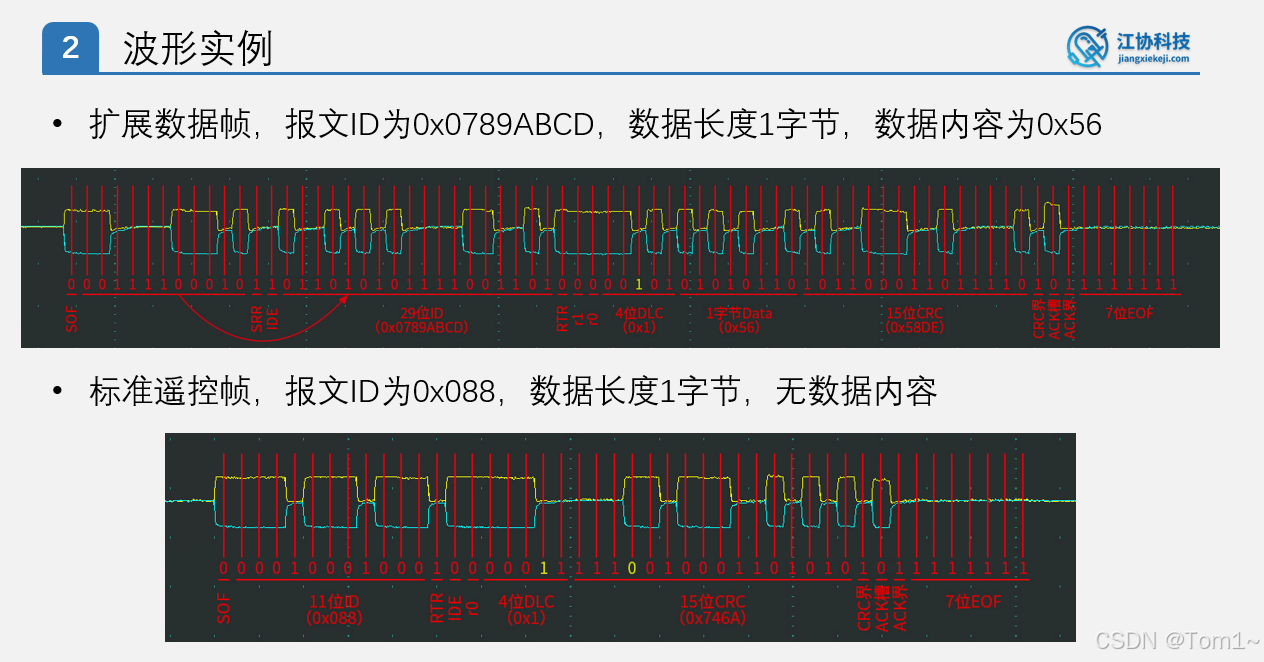
第二章 CAN总线帧格式
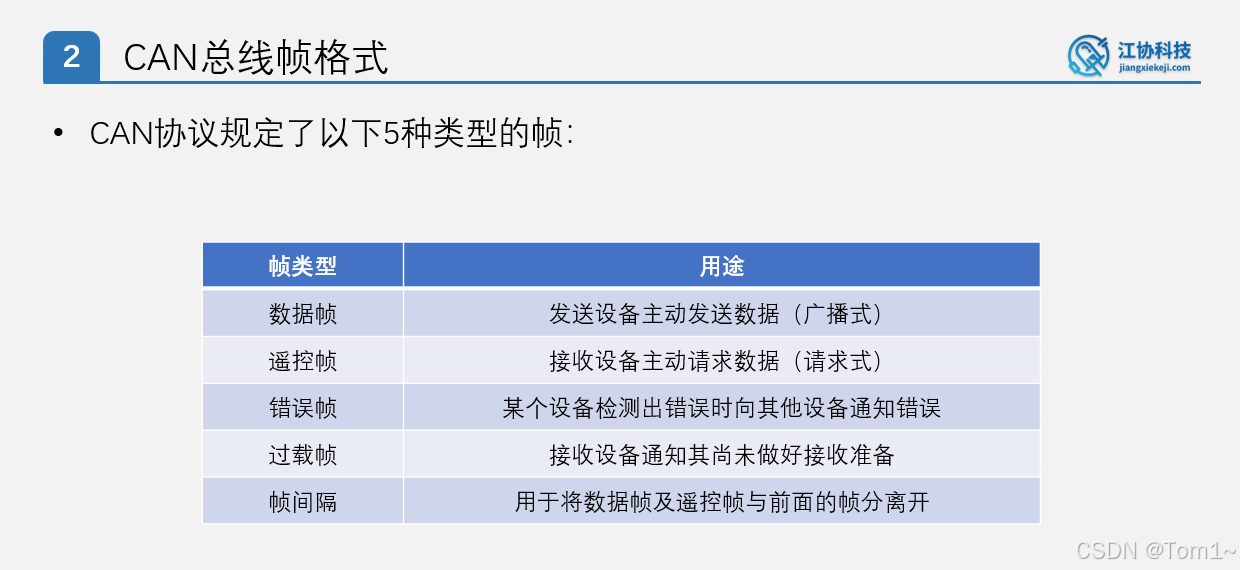
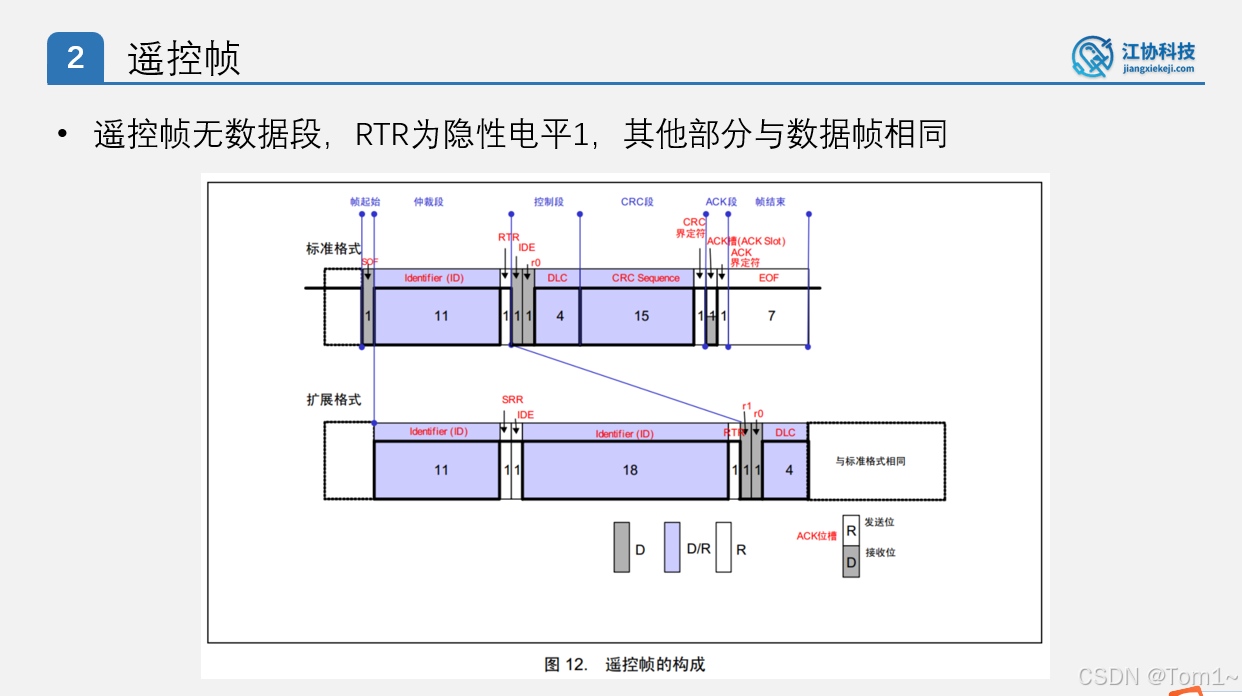
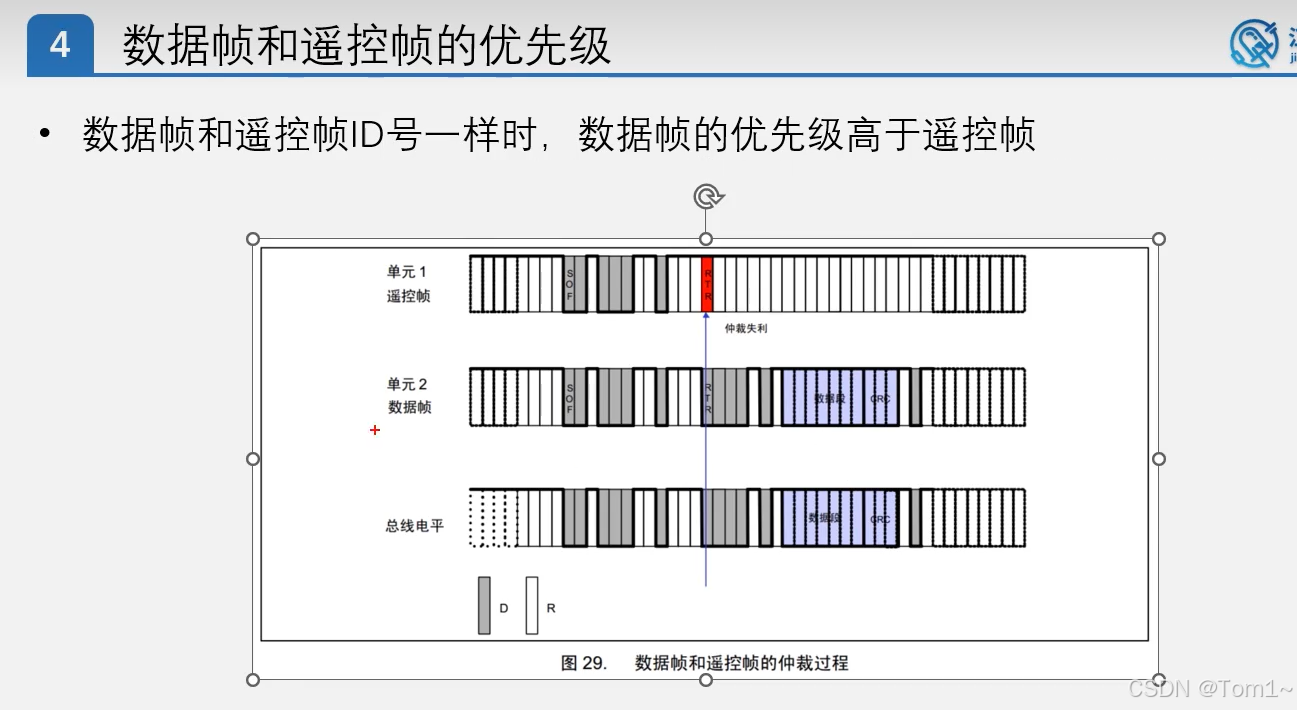
遥控帧的作用:接收设备主动请求数据。(为了实现请求式数据传播)
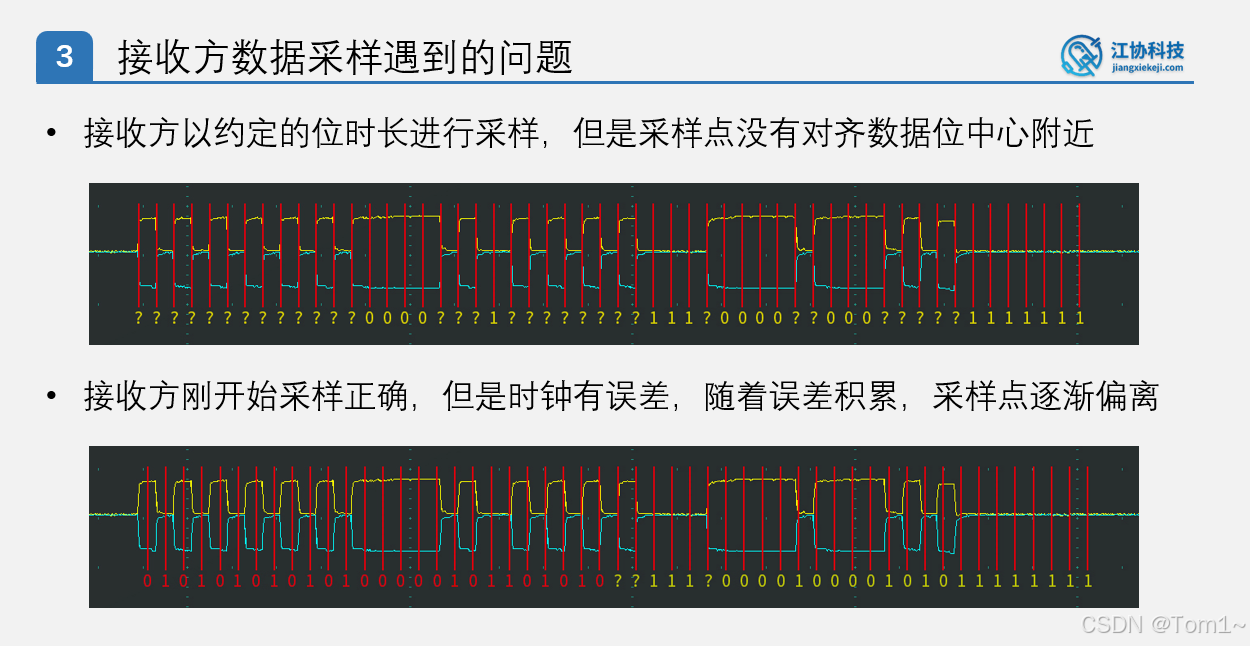
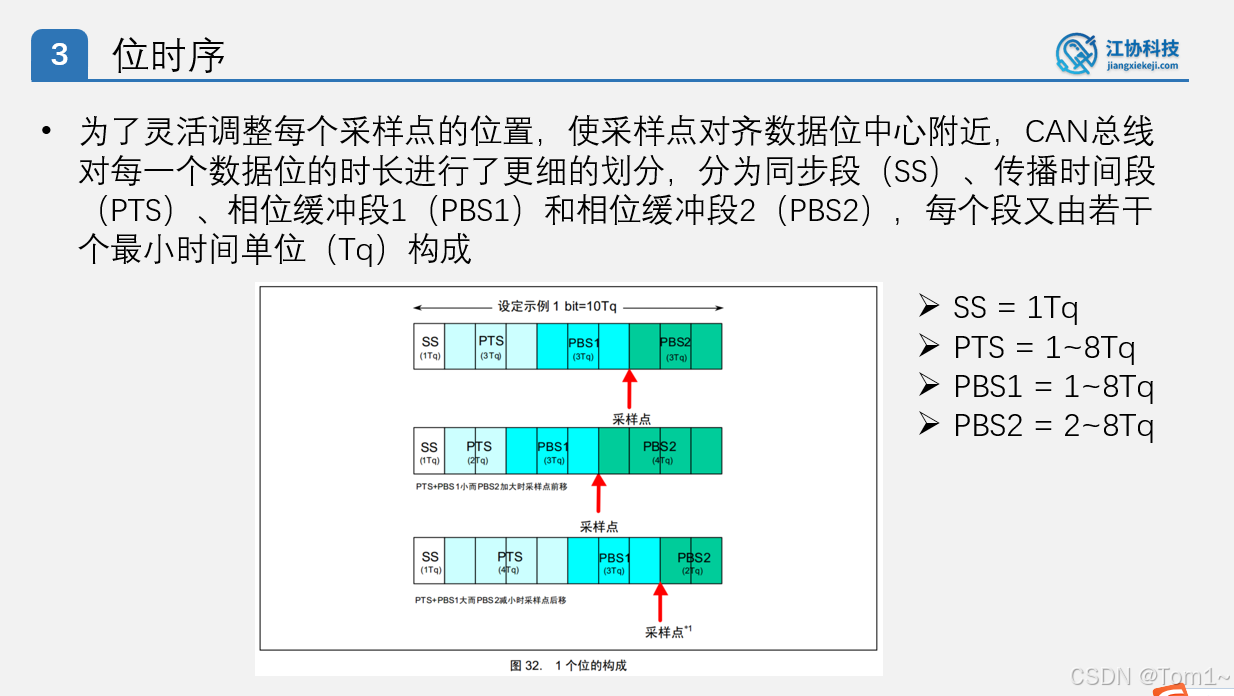
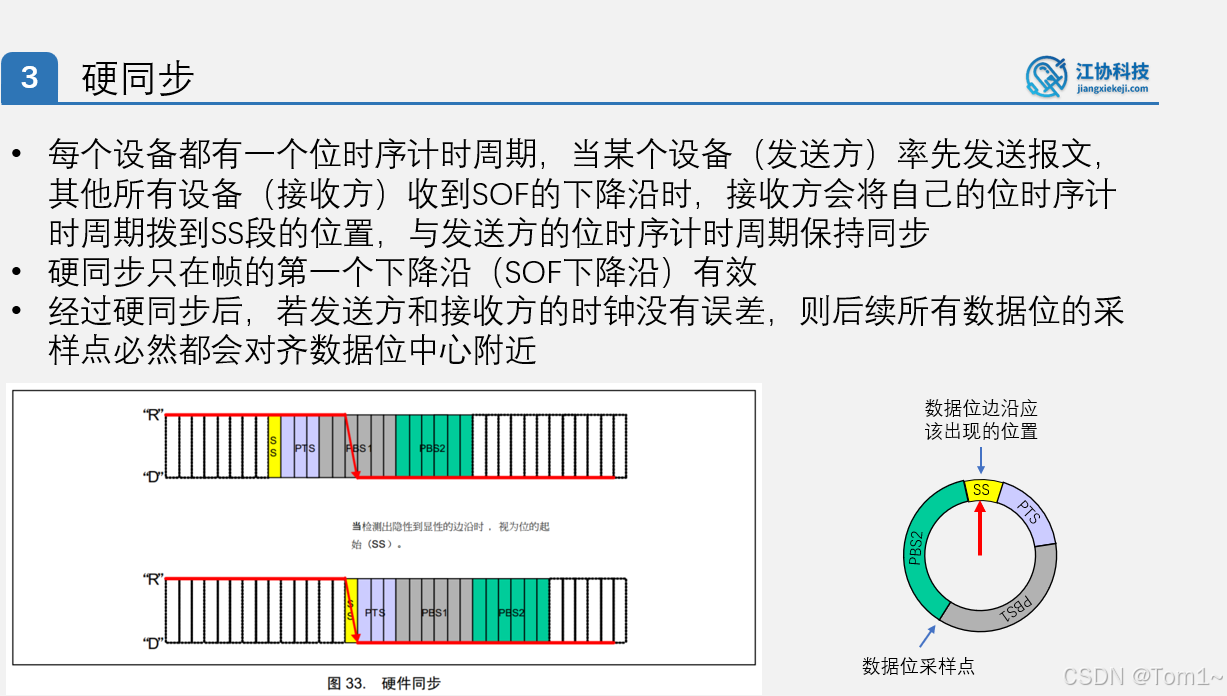
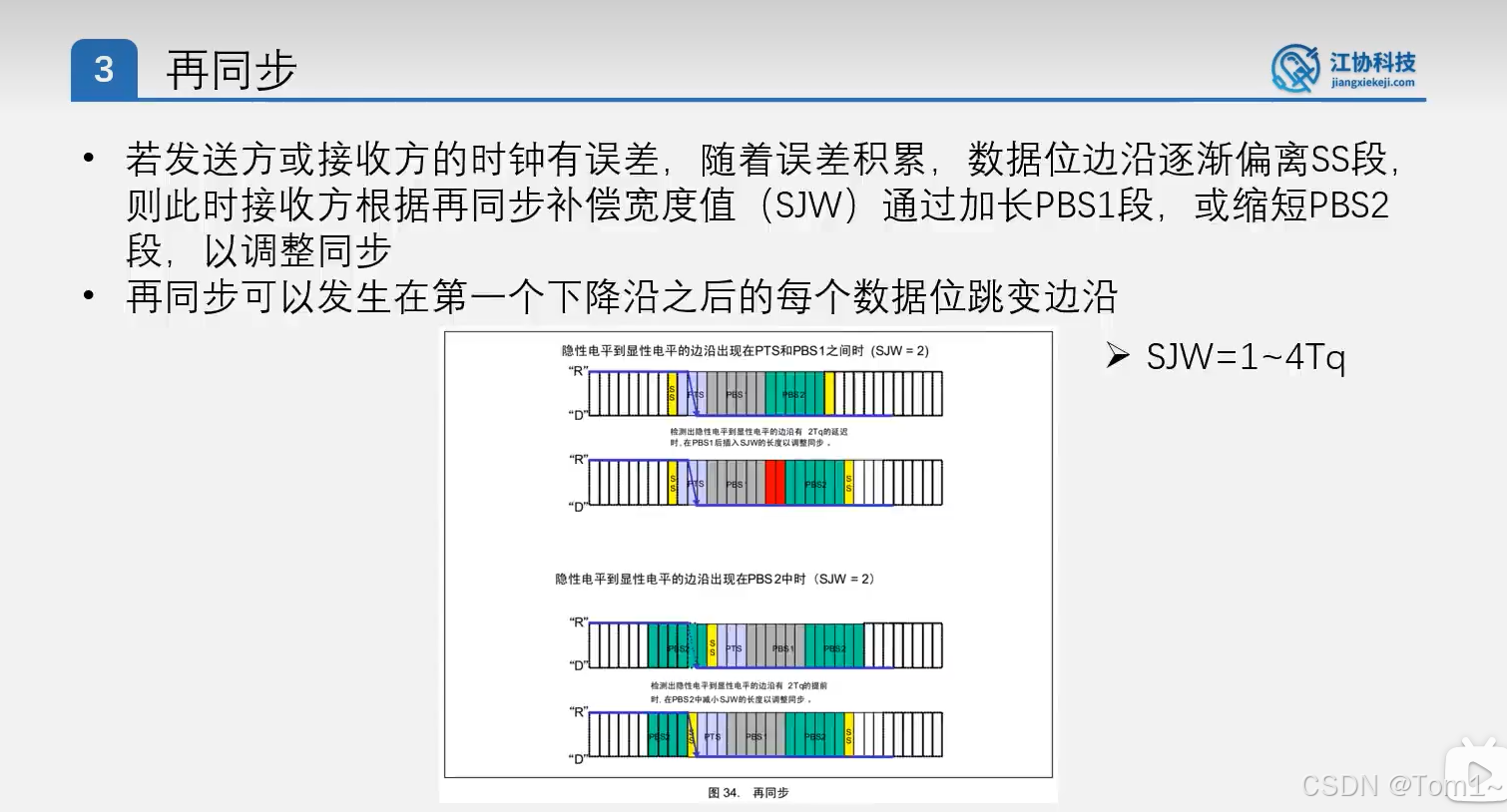
第三章 位同步
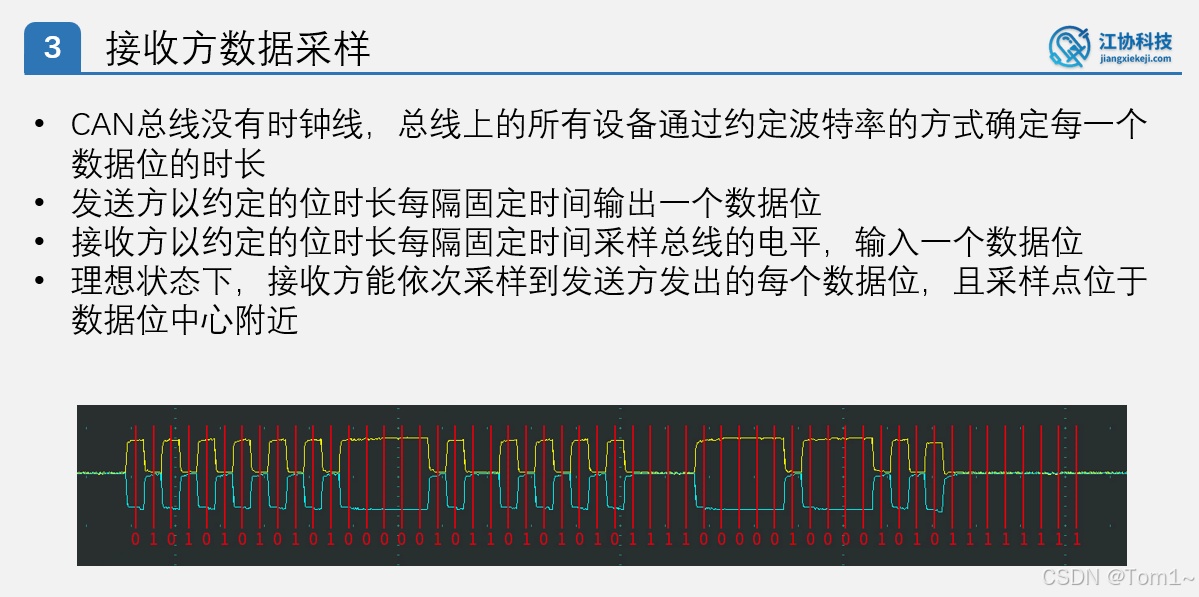
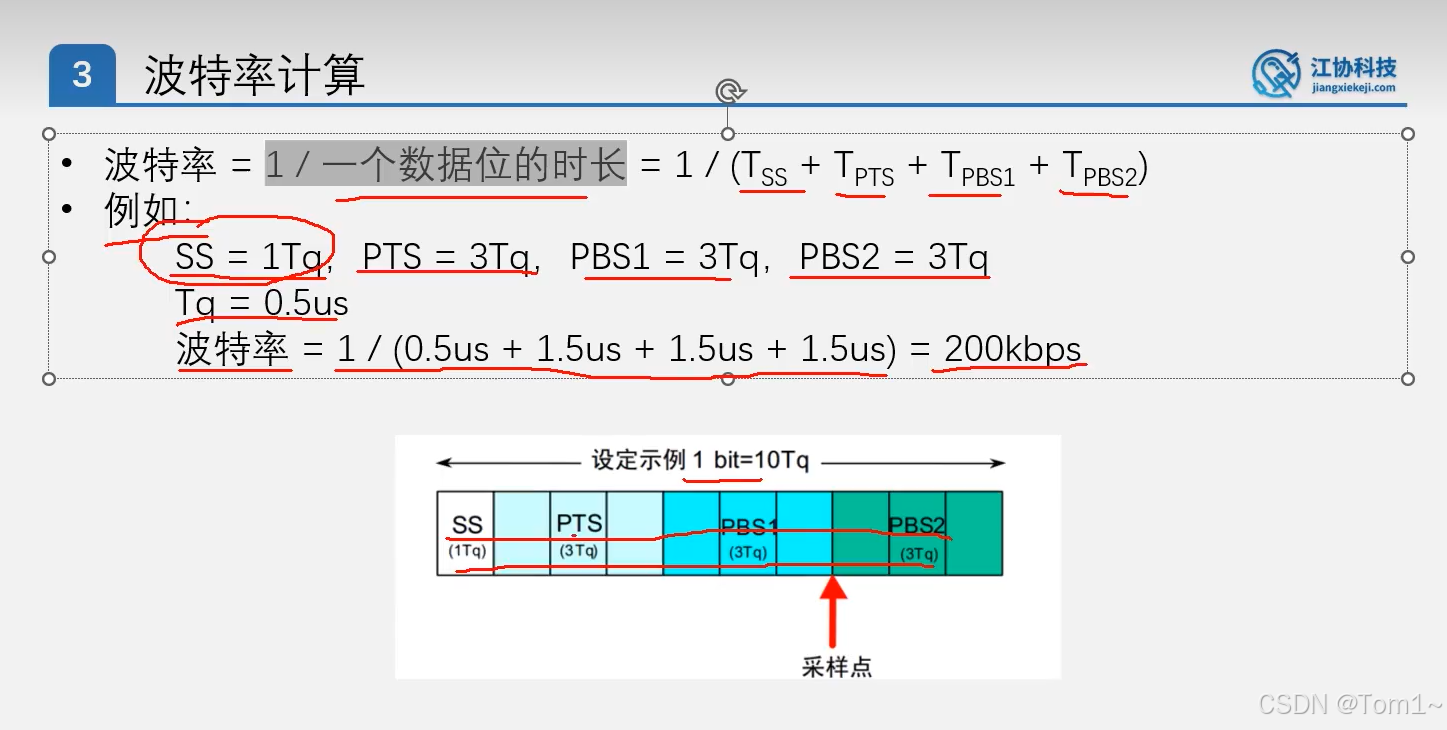
在二进制调制下,波特率=比特率。
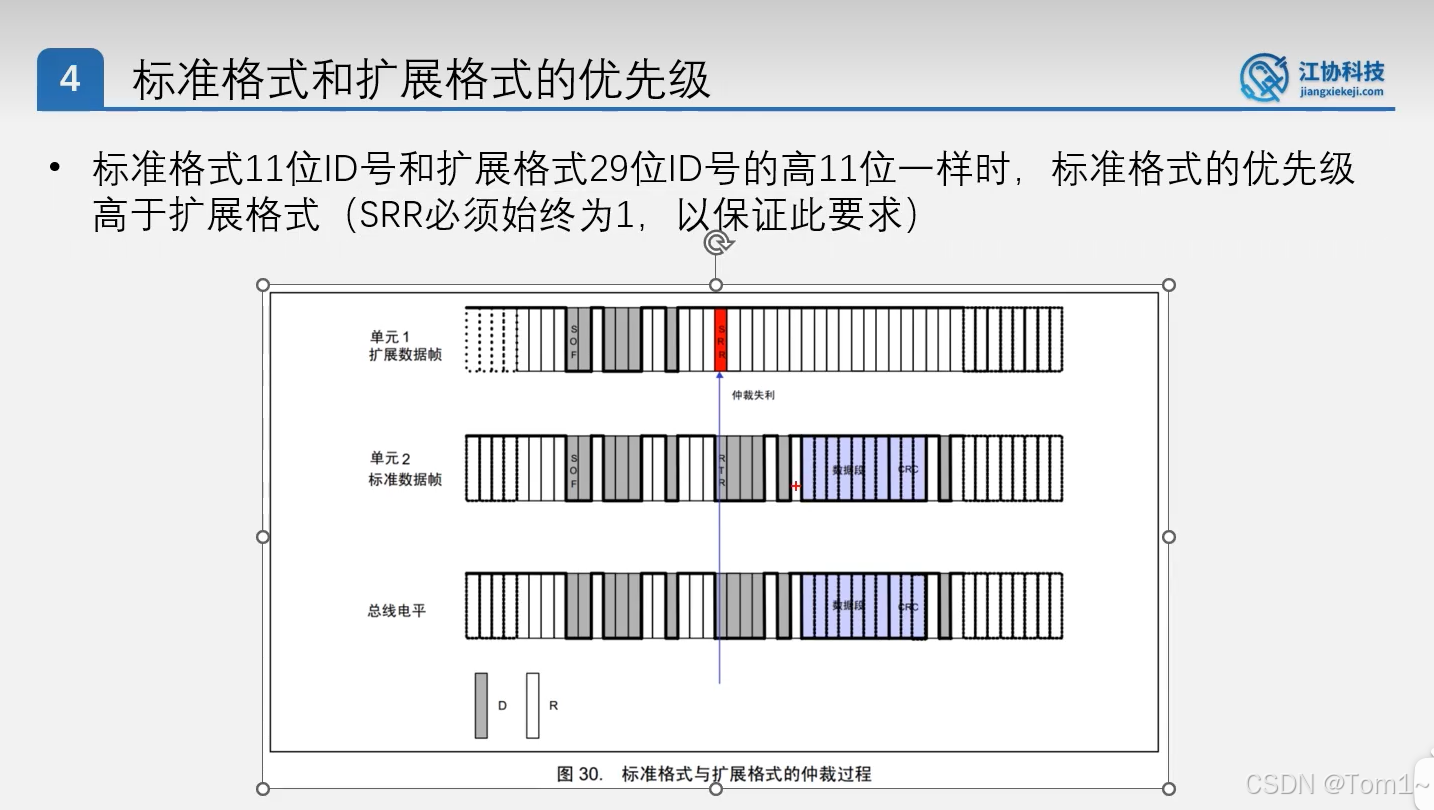
第四章 仲裁(总线的资源分配规则)
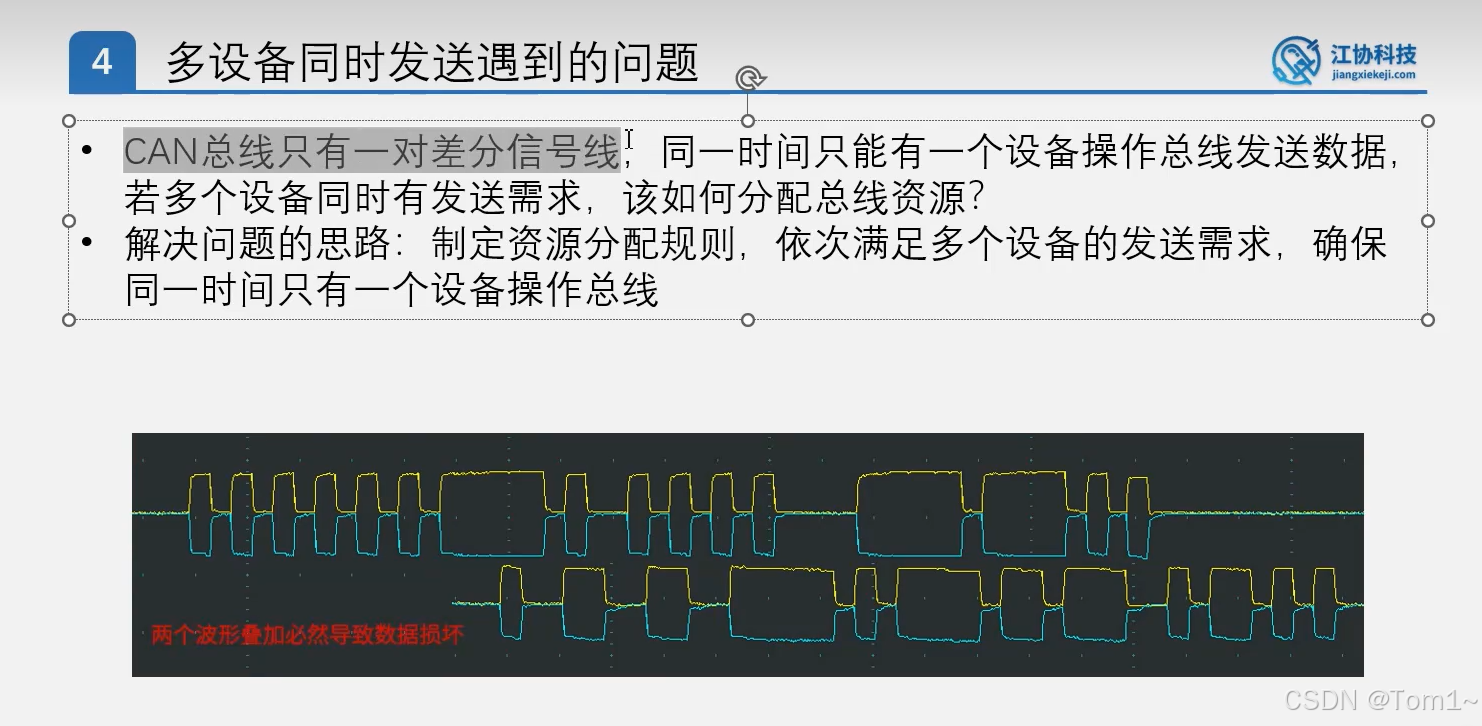
如果多个设备同时发送,且不制定规则进行管理,那么总线上的数据会按“线与”的规则对数据进行处理,即只要有一个设备拉开总线,总线就会呈现显性“0”的状态,只有所有的总线释放总线才呈现隐形“1”状态。如果按照这种“线与”的规则叠加后,所有设备发送的数据都会损坏。
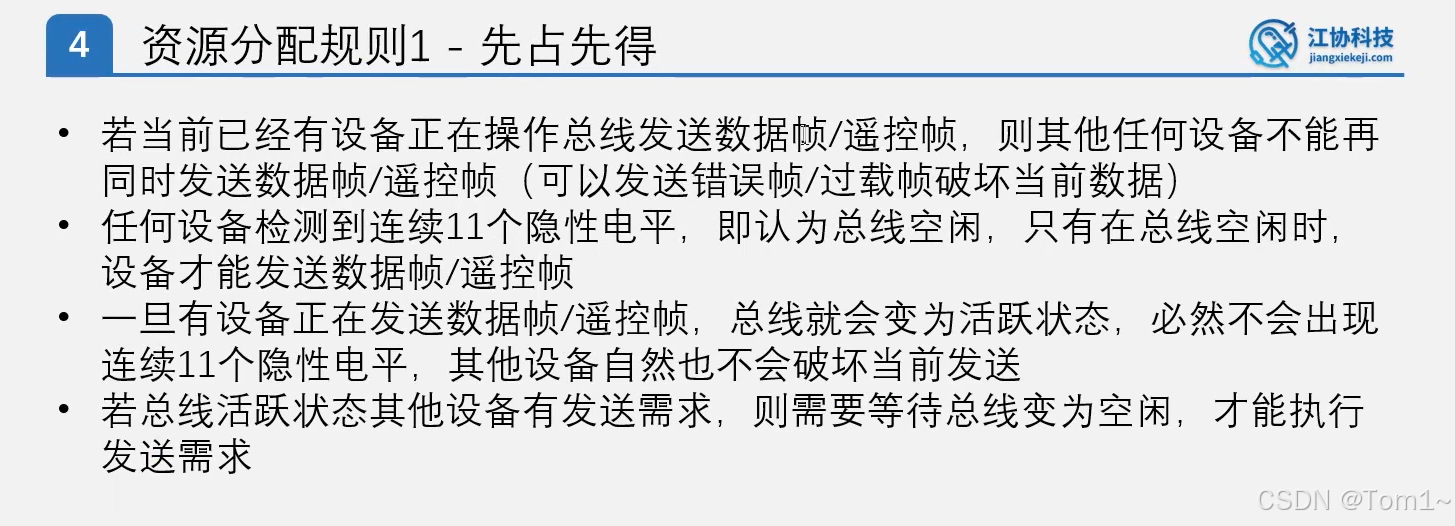
规则一:先占先得
针对上面所述的问题。
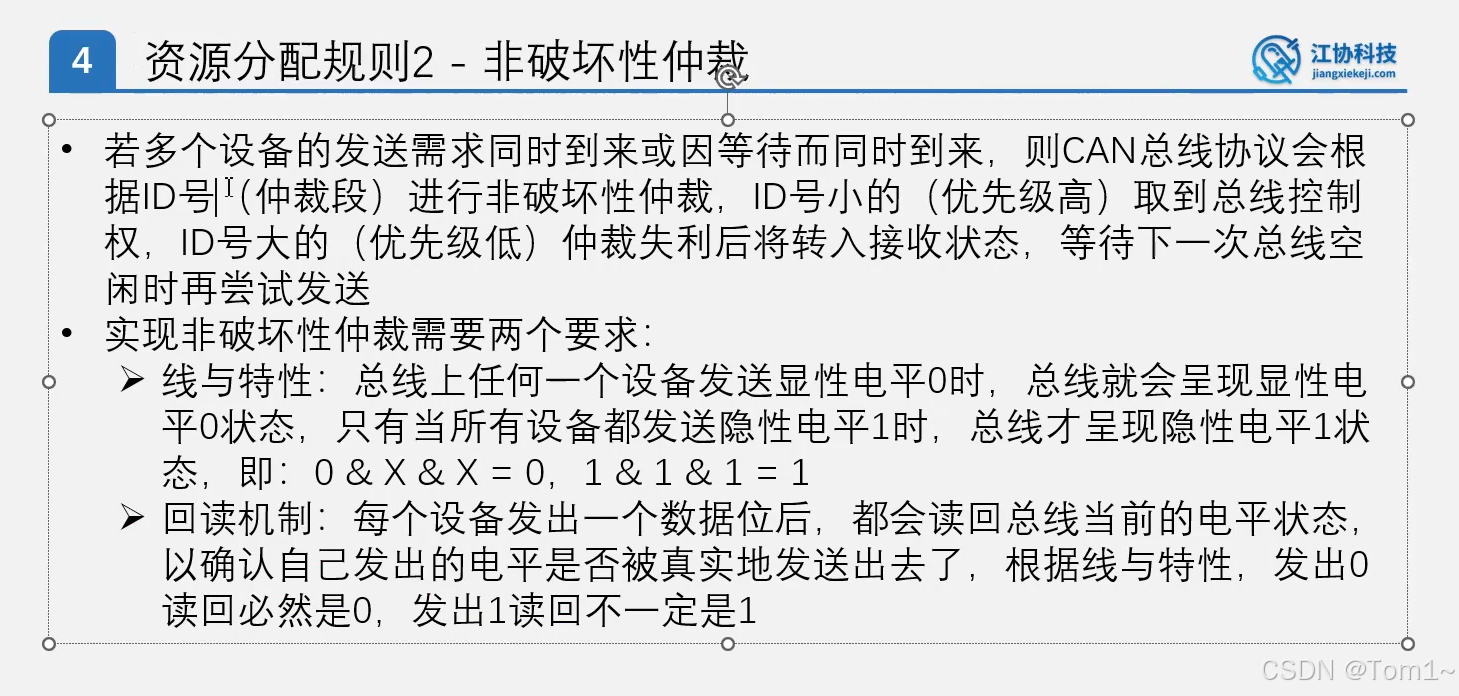
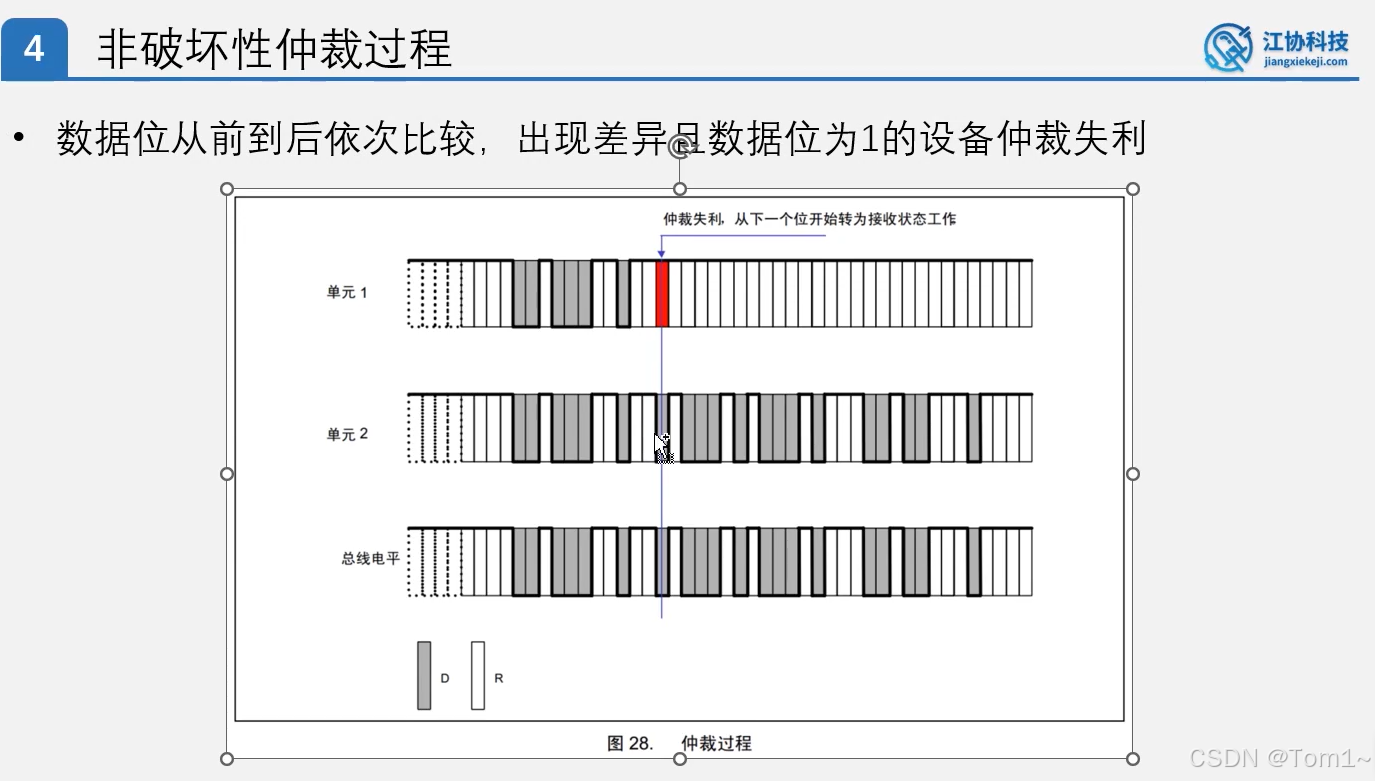
规则二:非破坏性仲裁
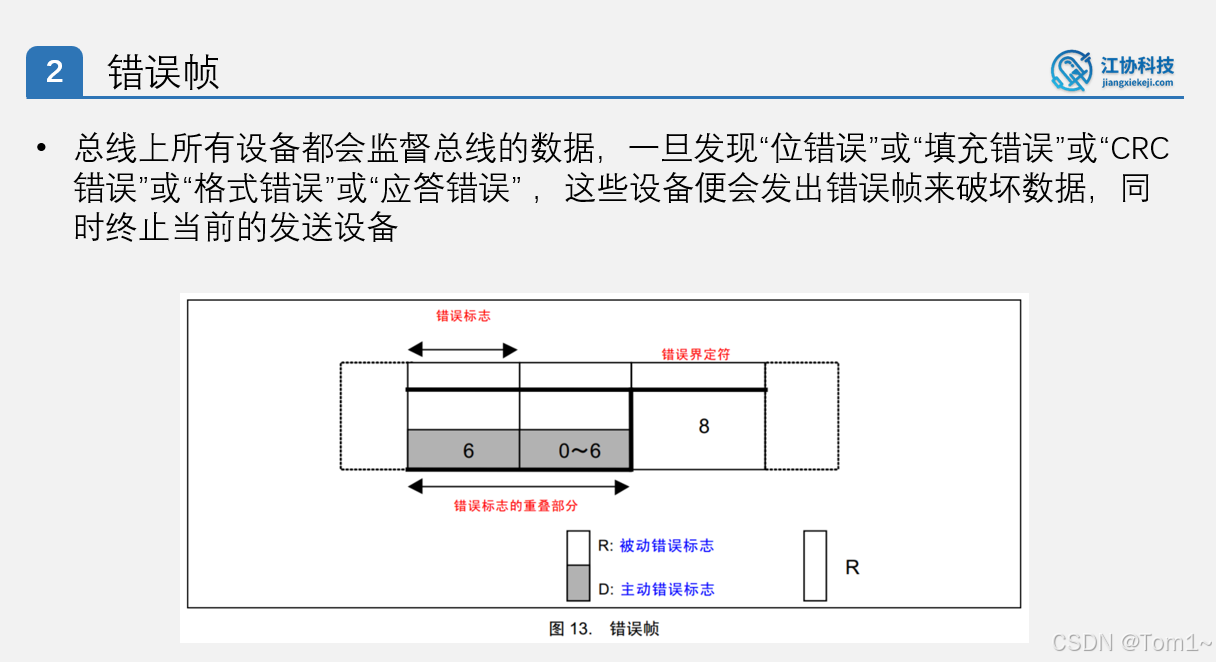
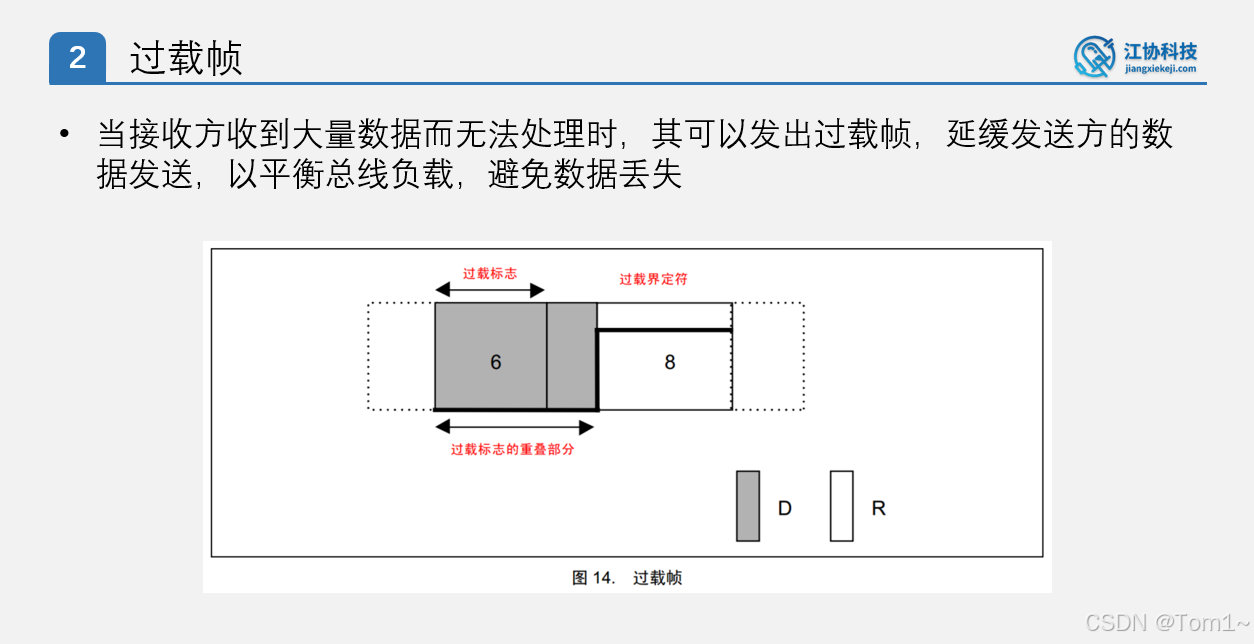
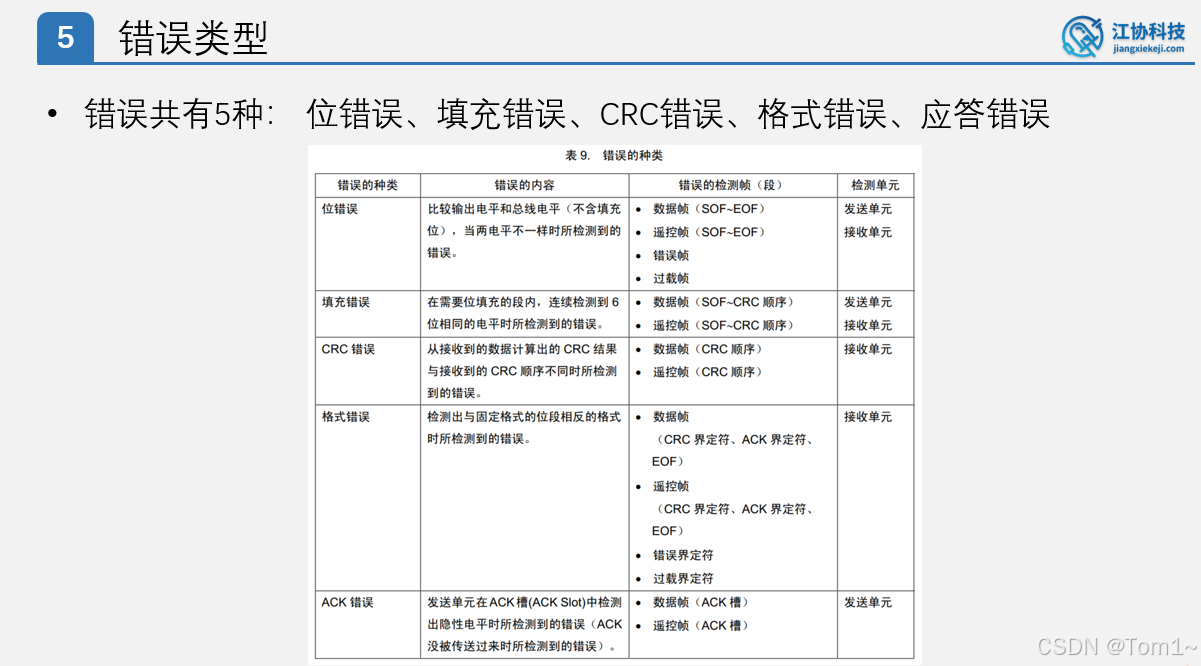
第五章 错误类型


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









