






 本文介绍了一种在图像处理中提取直线数据的方法,特别是对于斜向直线的处理。通过从起点到终点逐像素提取,并利用Flag地图避免重复数据,实现了对ROI区域内直线数据的准确提取。代码示例展示了如何从图像和掩模中获取一维直线数据,适用于图像检测等场景。
本文介绍了一种在图像处理中提取直线数据的方法,特别是对于斜向直线的处理。通过从起点到终点逐像素提取,并利用Flag地图避免重复数据,实现了对ROI区域内直线数据的准确提取。代码示例展示了如何从图像和掩模中获取一维直线数据,适用于图像检测等场景。
版权声明:本文为优快云博主「翟天保Steven」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.youkuaiyun.com/zhaitianbao/article/details/121113525
只转了些关键地方,详细实现过程请参考原文
需求说明
在对图像进行处理时,经常会有这类需求:客户想要提取出图像中某条直线或者ROI区域内的感兴趣数据,进行重点关注。该需求在图像检测领域尤其常见。ROI区域一般搭配Rect即可完成提取,直线数据的提取没有现成的函数,需要自行实现。
当直线为纵向或者横向时,比较简单,只需要从起点到终点提取该行或者列的数据即可;但是直线若为斜向的,则需要从起点出发,向终点方向逐个像素提取。大家都知道,图像是由许多像素组成,而斜向直线的数据提取路线并不一定就是标准的斜线,也可能是呈阶梯状的路线,而如何进行路线设计,就是本文所要展示的内容。
实现代码
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
using namespace std;
using namespace cv;
vector<pair<float, int>> GetOneDimLineData(const cv::Mat inImage, cv::Mat mask, cv::Point start, cv::Point end);
int main()
{
Mat src(10,10,CV_32FC1,nan(""));
for (int i = 3; i < 7; ++i)
{
for (int j = 3; j < 9; ++j)
{
src.at<float>(i, j) = rand() % 255;
}
}
cv::Mat mask = cv::Mat::zeros(src.size(), CV_8UC1);
mask.setTo(255, src == src);
Point start = Point(2, 1);
Point end = Point(8, 7);
vector<pair<float, int>> test= GetOneDimLineData(src,mask, start, end);
cout << "size:" << test.size() << endl;
for (int i=0;i<test.size();++i)
{
cout << i << ":" << endl;
cout << test[i].first << " " << test[i].second << endl;
}
return 0;
}
/**
* @brief GetOneDimLineData 获取一维直线数据
* @param inImage 输入位相图
* @param mask 输入掩膜图
* @param start 起始点坐标
* @param end 终点坐标
* @return 直线数据(数值&序号)
*/
vector<pair<float, int>> GetOneDimLineData(const cv::Mat inImage, cv::Mat mask, cv::Point start, cv::Point end)
{
vector<pair<float, int>> result;
int row = inImage.rows;
int col = inImage.cols;
int r1 = start.y;
int c1 = start.x;
int r2 = end.y;
int c2 = end.x;
// 确定两点间距离
float dist = round(sqrt(pow(float(r2) - float(r1), 2.0) + pow(float(c2) - float(c1), 2.0)));
if (dist <= 0.00001f) {
pair<float, int> temp;
temp.first = inImage.at<float>(r1, c1);
temp.second = 0;
result.push_back(temp);
return result;
}
// 横向纵向的步进间隔
float slope_r = (float(r2) - float(r1)) / dist;
float slope_c = (float(c2) - float(c1)) / dist;
// Flag地图,用于存储已放入的数据,避免同一数据二次放入
cv::Mat Flag = cv::Mat::zeros(mask.size(), mask.type());
// 数据量计数,从0开始
int k = 0;
for (float i = 0; i <= dist; ++i) {
// 若该点处于掩膜内,且未被Flag存储,则进行存储工作
if ((mask.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 255)
&& (Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 0))
{
pair<float, int> temp;
temp.first = inImage.at<float>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c)));
temp.second = k;
Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) = 255;
k++;
result.push_back(temp);
}
}
return result;
}
测试效果
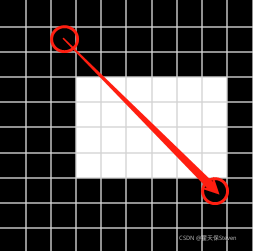
图1 初始化测试图像
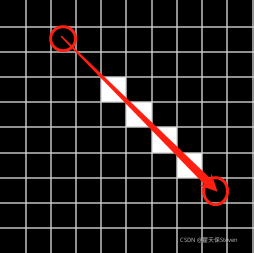
图2 Flag地图

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









