



 本文介绍了两种单源最短路径算法。Bellman - Ford算法能处理负边权情况,但无法处理负权回路,时间复杂度为O(NE),通过枚举边来更新最短距离。SPFA算法是其队列优化版本,减少冗余计算,时间复杂度为O(kE),利用队列不断更新最短路径。
本文介绍了两种单源最短路径算法。Bellman - Ford算法能处理负边权情况,但无法处理负权回路,时间复杂度为O(NE),通过枚举边来更新最短距离。SPFA算法是其队列优化版本,减少冗余计算,时间复杂度为O(kE),利用队列不断更新最短路径。
一、.Bellman-Ford算法O(NE)
简称Ford(福特)算法,同样是用来计算从一个点到其他所有点的最短路径的算法,也是一种单源最短路径算法。
能够处理存在负边权的情况,但无法处理存在负权回路的情况(下文会有详细说明)。
算法时间复杂度:O(NE),N是顶点数,E是边数。
算法实现:
设s为起点,dis[v]即为s到v的最短距离,pre[v]为v前驱。w[j]是边j的长度,且j连接u、v。
初始化:dis[s]=0,dis[v]=∞(v≠s),pre[s]=0
For (i = 1; i <= n-1; i++)
For (j = 1; j <= E; j++) //注意要枚举所有边,不能枚举点。
if (dis[u]+w[j]<dis[v]) //u、v分别是这条边连接的两个点。
{
dis[v] =dis[u] + w[j];
pre[v] = u;
}
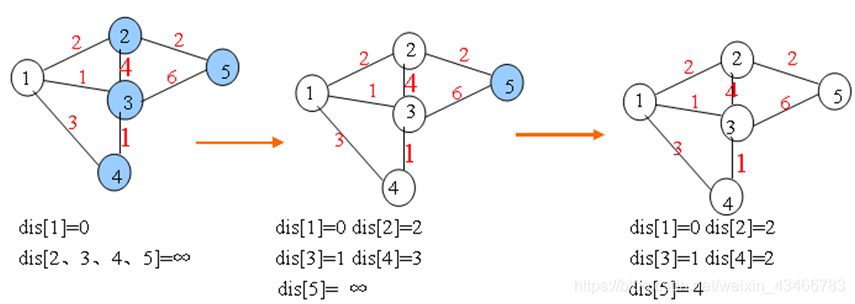
思路:Bellman-Ford算法的思想很简单。一开始认为起点是白点(dis[1]=0),每一次都枚举所有的边,必然会有一些边,连接着白点和蓝点。因此每次都能用所有的白点去修改所有的蓝点,每次循环也必然会有至少一个蓝点变成白点。
二、SPFA算法O(kE)
SPFA是Bellman-Ford算法的一种队列实现,减少了不必要的冗余计算。
主要思想是:
初始时将起点加入队列。每次从队列中取出一个元素,并对所有与它相邻的点进行修改,若某个相邻的点修改成功,则将其入队。直到队列为空时算法结束。
这个算法,简单的说就是队列优化的bellman-ford,利用了每个点不会更新次数太多的特点发明的此算法。
SPFA 在形式上和广度优先搜索非常类似,不同的是广度优先搜索中一个点出了队列就不可能重新进入队列,但是SPFA中一个点可能在出队列之后再次被放入队列,也就是说一个点修改过其它的点之后,过了一段时间可能会获得更短的路径,于是再次用来修改其它的点,这样反复进行下去。
算法时间复杂度:O(kE),E是边数。K是常数,平均值为2
算法实现:
dis[i]记录从起点s到i的最短路径,w[i][j]记录连接i,j的边的长度。pre[v]记录前趋。
team[1…n]为队列,头指针head,尾指针tail。
布尔数组exist[1…n]记录一个点是否现在存在在队列中。
初始化:dis[s]=0,dis[v]=∞(v≠s),memset(exist,false,sizeof(exist));
起点入队team[1]=s; head=0; tail=1;exist[s]=true;
do
{
1、头指针向下移一位,取出指向的点u。
2、exist[u]=false;已被取出了队列
3、for与u相连的所有点v //注意不要去枚举所有点,用数组模拟邻接表存储
if (dis[v]>dis[u]+w[u][v])
{
dis[v]=dis[u]+w[u][v];
pre[v]=u;
if (!exist[v]) //队列中不存在v点,v入队。
{//尾指针下移一位,v入队;
exist[v]=true;
}
}
}
while (head < tail);
循环队列:
采用循环队列能够降低队列大小,队列长度只需开到2*n+5即可。例题中的参考程序使用了循环队列。

















 1496
1496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









