



 本文详细介绍在三台Linux虚拟机上搭建Zookeeper分布式集群的过程,包括Java环境安装、Zookeeper配置与部署、防火墙设置及常见错误排查。
本文详细介绍在三台Linux虚拟机上搭建Zookeeper分布式集群的过程,包括Java环境安装、Zookeeper配置与部署、防火墙设置及常见错误排查。
一. 环境准备
本次的zookeeper 为分布式集群搭建,需提前准备三个Linux系统(虚拟机),而zookeeper的搭建需要Java环境,所以加上 Oracle 的Java安装包和 zookeeper的安装包。
二.开始安装
- 首先开始安装 Java的运行环境,此处就不多介绍了,给大家提供一个教程,跟着来一步一步操作就可以了。-----Linux 环境Java环境的安装。
安装结束后在控制台输入Java -version 显示如下内容表示安装成功了。
- 开始部署zookeeper,先提一下部署的步骤,为了节省时间和不必要的操作。现在一台虚拟机上将zookeeper环境部署完成 ,然后通过 scp 的命令将 部署好的zookeeper 发送到另外两个机器上。
第一步:登录到虚拟机,通过su 指令切换到超级用户。在/root 目录下新建一个 zk 目录(个人习惯,可以自己更改,但是三台机器放置zookeeper的目录最好相同)。然后将 zookeeper的安装包通过 mv 指令 移动到此文件夹下面。cd 到当前目录 ,执行 tar -zxvf ****** ,指令对其进行解压。解压后的如下图所示(由于文件名太长,用 mv zookeeper -XXXX zookeeper 指令更改为zookeeper)
第二步:解压完之后,开始对其进行配置,cd zookeeper 进入到 zookeeper安装包中,首先在根目录下创建两个目录 :dataDir, dataLogDir .一个用于存放数据,另一个用于存放产生的日志信息。指令如下: mkdir dataDir , mkdir dataLogDir.
第三步:在zookeeper的根目录下,有一个conf 目录,此目录用于对zookeeper的集群进行配置。在当前目录为根目录的基础上 cd conf ,切换到 conf 中,其下有三个文件。我们只需要关注一个文件就可以了:zoo-sample.cfg . 我们需要zoo-sample.cfg 改名为 zoo.cfg(zookeeper会默认读取zoo.cfg文件)。然后 vi zoo.cfg 对其进行配置:
我们只需要关注需要配置的一些,其他相关配置可以自行了解,vi 进去之后 如下所示:
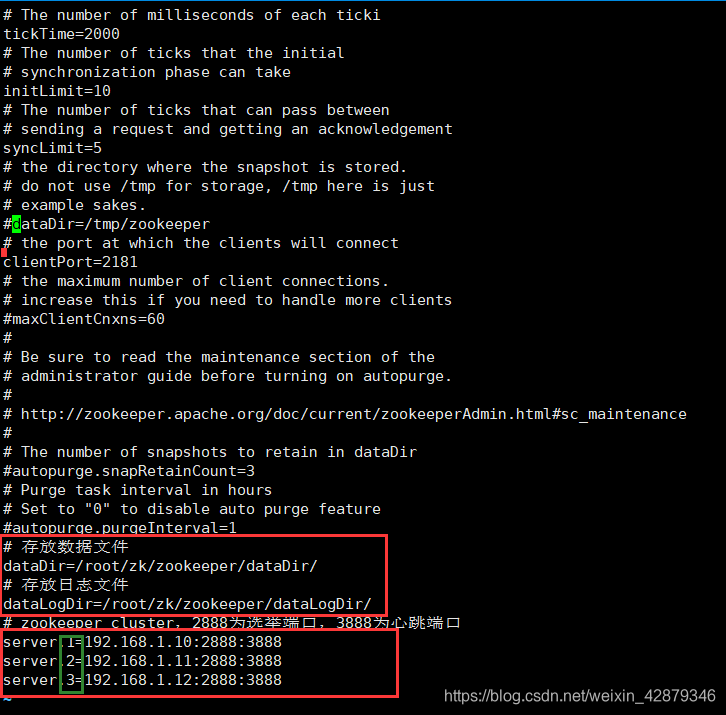
在第一个红色提示框中配置的时之前新建两个文件的存放位置,第二个红框配置的三台机器对的ip及对应的端口。请记住每台IP前面对应的绿色标注的数字,每个IP对应一个数字,后面的配置需要用到。(再啰嗦一点,vi到当面 页面 点击 i 进入可编辑状态,点击esc 退出可编辑状态,如果不想更改内容 。在退出编辑状态后 输入 :q! 即可不保存退出。 输入 :wq 为保存当前内容进行退出。)
第四步:zoo.cfg 配置完之后,cd 到 dataDir 目录下。通过 touch 指令创建 myid 文件,然后vi 进去,输入前面需要记住的 与IP对应的那个数字。比如 我这里: 192.168.1.10 对应的是 1 .在 myid 文件中输入1 然后保存退出即可。

第五步:需要配置的内容到这里就结束了,接下来通过 scp 的指令将配置好zookeeper 发送到其他两台机器( cd /root/zk 切换目录,可以方便些):
scp zookeeper root@192.168.1.11 /root/zk/
scp zookeeper root@192.168.1.12 /root/zk/
【注意:】需要登录其他两台机器,在/root 目录下 创建 zk 文件夹!!
cope 完成后,进入对用的 /root/zk/zookeeper/dataDir/ 下的 myid 文件,修改对应的值。根据我这里的配置 。分别任对应的配置为 192.168.1.11 ==》 2 和 192.168.1.12 ==》3.
第六步:配置到此结束,在启动之前需要确认 三台机器的防火墙进行了关闭,提供一下命令行:
(Centos 下的命令):
firewall-cmd --state – 查看防火墙是否启动
systemctl stop firewalld.service – 关闭防火墙
systemctl disable firewalld.service --禁止开机启动,永久关闭防火墙
以上三个步骤最后依次进行执行!!
第七步:分别在三个机器上 cd 到 zookeeper 的 bin 目录下(cd /root/zk/zookeeper/bin),执行如下命令:
./zkServer.sh start
,启动完成后。在执行如下命令查看其状态:
./zkServer.sh status
分别显示如下则启动成功:
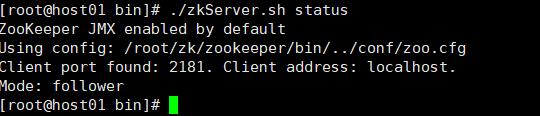

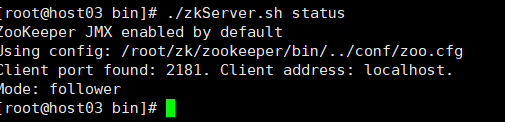
可通过 Mode 查看主从。
3. 错误提示
在配置过程中可能会发生很多的错误,比如我在进行配置的时候,应为在 conf 下面的 zoo.cfg 配置文件中 三个节点的IP我用主机名进行代替,导致检查了很多遍都没有检查出来。所以在发生错误的时候一定要耐心的对待。下面总结一下配置zookeeper 可能会发生的错误点!
- 三个节点IP 对应的 数字 及 dataDir 下面的 server. ? 中对应的 ? .对应配置到 dataDir 下面的 myid 下面,千万不能搞错。
- 防火墙一定要确认处于 not running 状态。

















 1037
1037

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









