



 本文档详细介绍了如何使用阿里云身份证识别服务,从开通服务到运行官方Demo,包括在IDE中配置、修改访问密钥及运行项目,助力开发者快速上手实现实时文字识别。
本文档详细介绍了如何使用阿里云身份证识别服务,从开通服务到运行官方Demo,包括在IDE中配置、修改访问密钥及运行项目,助力开发者快速上手实现实时文字识别。
今天的内容是文字识别,以身份证上的文字识别为例
1.开通服务
前往官网https://vision.aliyun.com/,找到身份证识别服务并开通

2.下载官方Demo
前往github下载压缩包并解压 https://github.com/aliyun/alibabacloud-viapi-demo
3.用合适的IDE打开并更换maven并更新加载依赖
4.在application.peoperties中修改access key id和secret
5.运行项目
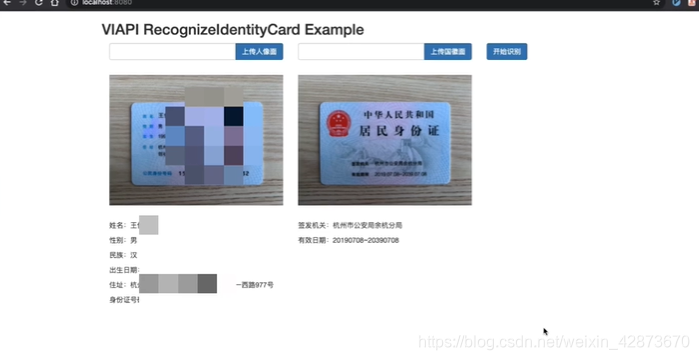
有点意思~
阿里云高校计划,陪伴两千多所高校在校生云上实践、云上成长。在这里你可以领用免费的cpu资源,还可以参加免费训练营,实践提高:https://developer.aliyun.com/adc/student/

















 2991
2991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









