



本文为美国犹他州立大学(作者:Roque Lora)的硕士论文,共62页。
本文将延迟卡尔曼滤波器扩展到考虑测量延迟的延迟扩展卡尔曼滤波器,该滤波器使用GPS和摄像机测量来估计无人机系统(UAS)的状态。GPS输出被一个随机数延迟,这就产生了无序测量问题。该滤波器基于当前测量状态的计算,以便当延迟测量可用时,计算测量时间的最佳滤波器并将其传播到当前时间。滤波器提供的估计值用于将天线和摄像头指向UAS。
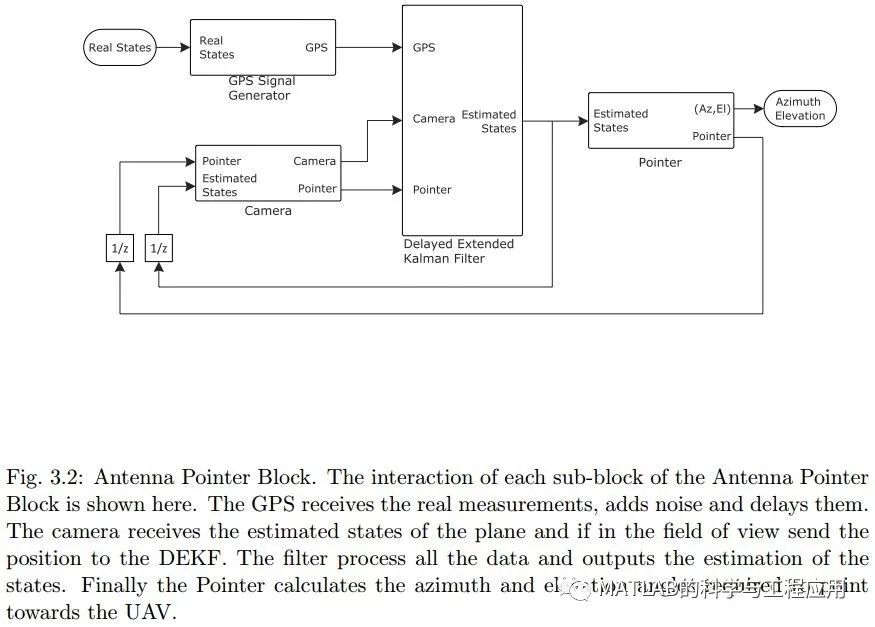
This extends the delayed Kalman filter to a delayed extended Kalman filter that takes into account the delays of the measurement. The filter uses GPS and camera measurements for the estimation of the states of an unmanned aerial system (UAS). The GPS output is delayed by a random number, which produces the out-of-sequence measurement problem. The filter is based on calculating the states with the measurements at the moment, so that when the delayed measurements are available, the optimal filter for the time of the measurement is calculated and propagated to the present time. The estimates provided by the filter are used to point an antenna and a camera towards the UAS.
1 引言
1.1 项目背景
1.2 本文贡献
1.3 文献回顾
2 传感器与卡尔曼滤波器
2.1 飞行器动力学
2.2 全球定位系统
2.3 摄像机
2.4 卡尔曼滤波器
3 仿真设计
3.1 仿真概述
3.2 天线指向
3.3 三维绘图
4 结果
4.1 GPS与GPS结合摄像机的估算比较
4.2 具有0.75秒随机延迟的EKF和DEKF估计精度比较
4.3 无延迟、0.25秒、0.50秒和0.75秒随机延迟的估计精度比较
5 结论
推荐公众号:电力电子技术与新能源

推荐公众号:MATLAB基于模型的设计

下载英文原文请点击“阅读原文”


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









