 视觉与传感技术在海事领域的应用
视觉与传感技术在海事领域的应用






论文笔记190626
1、基于视觉的无标记测量系统,用于相对船舶定位-2016
Vision-based markerless measurement system for relative vessel positioning
https://ieeexplore.ieee.org/document/7553631
摘要:相对船舶定位的测量对于防止船舶碰撞或工作效率降低的重要性是重要的。本研究提出了一种基于视觉的系统,用于测量船舶和目标物体之间的相对位置和航向,而无需安装转发器,反射器或标记。这种无标记测量系统不受转发器存在或不存在的限制,是扩展相对船舶定位的可行条件的方法。所提出的系统包括多个摄像机单元,其可以测量目标对象上的初始指定点之间的距离和方向,同时跟踪指定点。为了评估所提出系统的测量性能,作者使用水中的原型系统进行了测量。
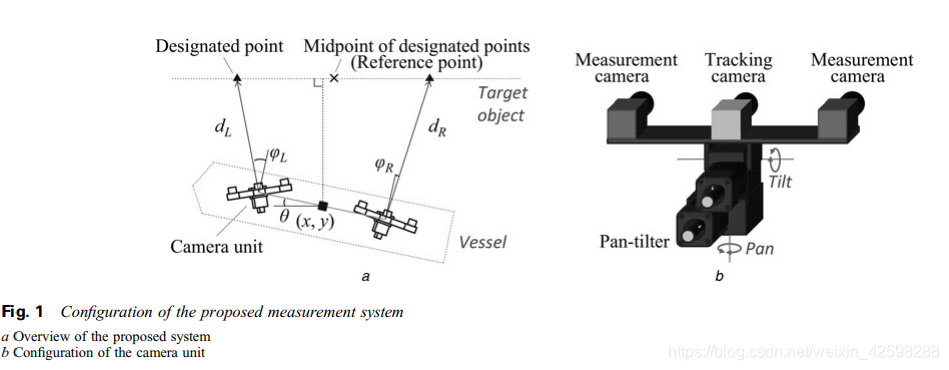
结论:在本文中,我们提出了一种基于视觉的相对船舶定位测量系统,无需在目标上安装转发器,反射器或标记。使用距离和方向角测量船舶的位置和航向
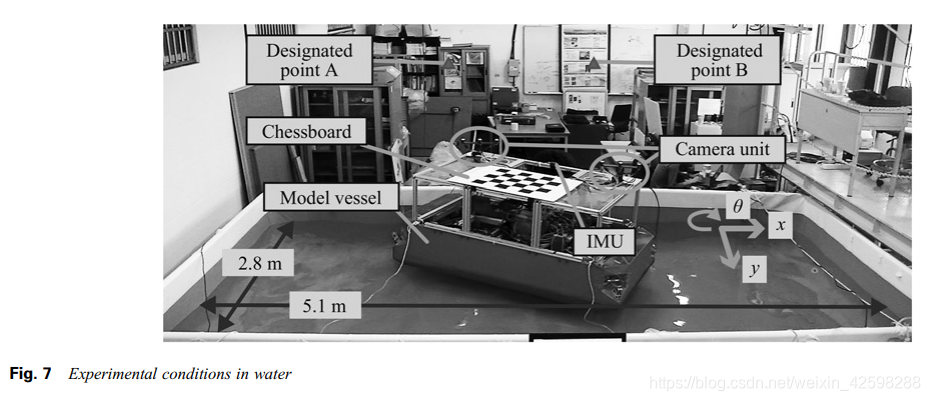
目标上的指定点和安装在船舶侧面的摄像机单元。摄像机单元能够使用基于GPS的特征点检测和匹配算法来跟踪指定点。基于从两个测量相机之间的特征点对应关系获得的单应性来估计到指定点的距离。我们评估了在船舶在水中存在和不存在滚动运动的条件下给定位移和旋转的所提出系统的测量性能。
该实验的结果表明,所提出的系统可以跟踪指定点并连续测量船舶的相对位置和标题。所提出的系统也被证明足够准确
尽管存在船只的滚动运动,但在近距离处的相对定位。从这些结果中,我们得出结论,无论目标是否具有转发器,反射器或视觉标记,所提出的系统都有可能被用作相对定位的测量系统。
2、通过融合雷达和激光雷达持续自动跟踪多个水面舰船-2017
https://ieeexplore.ieee.org/document/8084714
摘要:本文讨论了无人水面舰艇(USVs)多个水面舰船自动目标跟踪问题。为了安全的USV操作,对周围环境中的船只的检测是一项重要的能力,并且已经使用海洋雷达来检测和估计它们的运动。然而,由于其固有的阴影区域,使用雷达的短程船只检测具有挑战性。因此,我们提出了一种融合脉冲雷达和3D激光雷达的船舶跟踪方法。使用雷达和激光雷达传感器获得USV和附近船舶之间的相对方位和距离信息,并且基于使用扩展卡尔曼滤波器(EKF)的双滤波器结构来估计它们的运动,包括位置,航向和速度。这种方法可以持续跟踪多个表面船舶。
跟踪方法包括三个部分。首先,通过在其测量上应用自动特征提取算法,使用脉冲雷达和3D激光雷达检测目标对象。其次,从提取的特征中获得目标的相对方位和范围信息。最后,使用扩展卡尔曼滤波器(EKF)在双滤波器结构中分析目标运动。
利用雷达,实现了像素检测器和联合概率数据关联(JPDA)跟踪器
将摄像机测量结果组合成基于雷达的跟踪算法,以补充雷达的轴承测量并最小化死区。
包括雷达,激光雷达和安装在USV平台上的立体摄像机的多传感器模块被应用于海上交通船的目标跟踪。
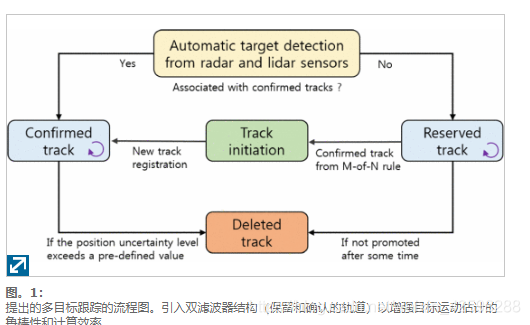
结论:该研究提出了一种用USV自动目标跟踪多个表面船舶的方法。使用脉冲雷达和3D激光雷达来检测周围环境中的障碍物,并且应用分割算法来提取传感器测量的目标。
对于目标运动分析,检测结果被合并到基于EKF的跟踪滤波器中。为了提高计算效率,引入并实现了双滤波器结构,并且在双滤波器结构中组合了雷达和激光雷达测量。该方法能够持久且稳健地跟踪多个表面船舶。
3、用于无人水面舰船的船用单目摄像机对海上交通船舶的被动目标跟踪
https://ieeexplore.ieee.org/document/7130798
摘要:使用安装在无人水面船上的单目摄像机来提高船舶交通船的被动目标跟踪和轨迹估计的性能。为了准确估计目标交通船的轨迹,需要观测船和目标船之间的相对方位和距离信息。单目视觉以合理的准确度提供方位信息,但没有明确的范围信息。相对距离信息可以从仅轴承跟踪(BOT)框架中的相对船舶运动引起的轴承变化中提取。BOT可以在具有较大轴承角度变化的交叉情况下有效。然而,由于小的轴承角度变化以及由此导致的跟踪滤波器的低可观察性,它经常在正面或超车情况下失败。为了解决缺乏可观察性的问题,使用了图像中地平线和目标船之间的垂直像素距离,这提高了整体目标跟踪性能。通过海上实地试验验证了所提出的跟踪方法的可行性和性能。
结论:本函介绍了基于视觉的跟踪滤波器的配方,即使在低可观测条件下,也能使用机载单筒望远镜估算海上交通船的轨迹。 为了改善状态可观察性和滤波器性能,除了水平方位角测量之外,还将检测到的水平线与图像中的目标船之间的垂直像素距离引入滤波器。 通过现场实验验证了所提方法的性能
真实的海洋环境,以显示只有自主导航的无人水面舰艇的可行性。
4、用于海洋环境中物体检测和跟踪的电光传感器的视频处理:一项调查-2017
https://ieeexplore.ieee.org/document/7812788
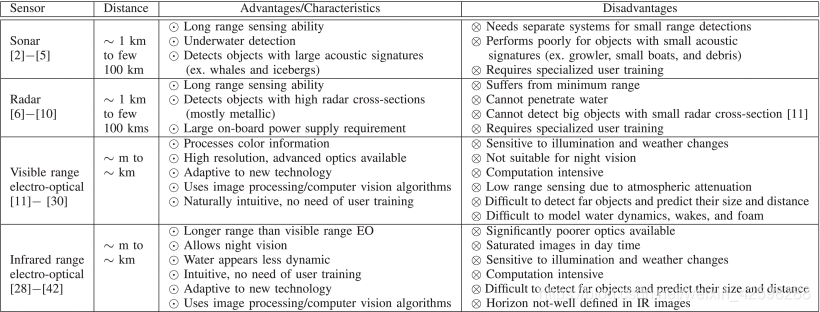
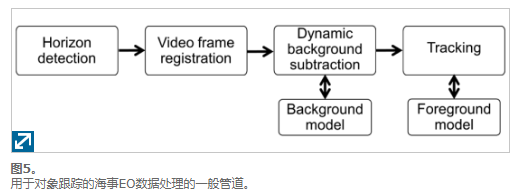
摘要:我们提出了一项关于海上物体探测和跟踪方法的调查,这对于自主船舶导航系统的开发至关重要。这里考虑的电光(EO)传感器是一种在可见光或红外光谱中运行的摄像机,它通常补充雷达和声纳,用于海上态势感知,并在过去几年中证明了它的有效性。本文全面概述了海事环境中物体检测和跟踪的各种视频处理方法。我们遵循基于方法的分类法,其中比较了每种方法的优点和局限性。物体检测系统由以下模块组成:水平检测,静态背景减法和前景分割。这些中的每一个都已经在海上情况下进行了广泛的研究,并且由于背景运动的存在而特别是由于波浪和尾流而被证明是具有挑战性的。对象跟踪中涉及的关键过程包括视频帧注册,动态背景减法和对象跟踪算法本身。由于相机运动,动态背景和跟踪对象的低对比度(可能由于环境恶化)而产生强大跟踪的挑战。该调查还讨论了使用EO传感器的多传感器方法和商业海事系统。该调查还强调了计算机视觉研究的方法,这些方法有望在海事EO数据处理中表现良好。新加坡海事数据集评估了若干海事和计算机视觉技术的表现。
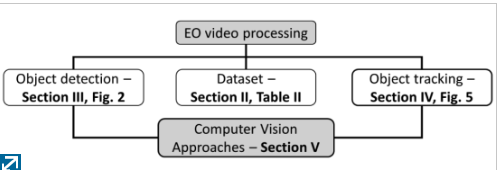
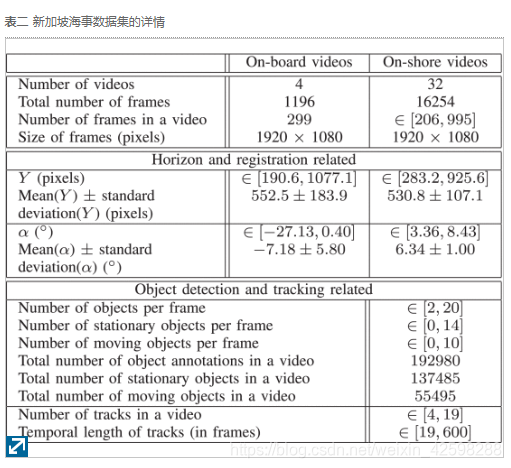
第二节、数据集
MarDCT 1可在线获取用于学术和研究目的,我们在新加坡水域使用佳能70D相机创建了新加坡海事数据集,分为部分,岸上视频(可见和近红外)和车载视频。
第三节、物体检测
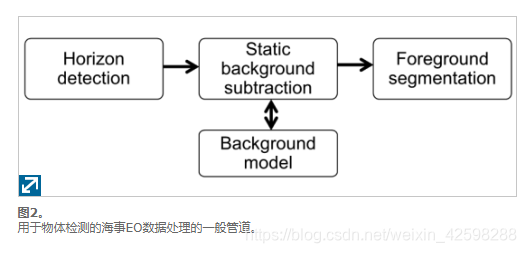
A、地平线检测:基于投影,基于区域和混合方法
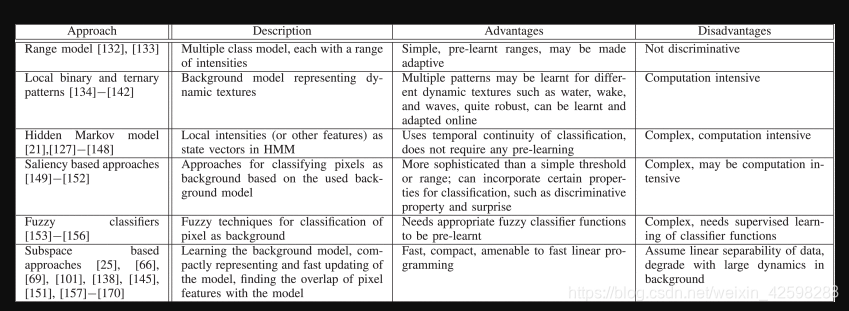
B、静态背景减法
C、前景分割
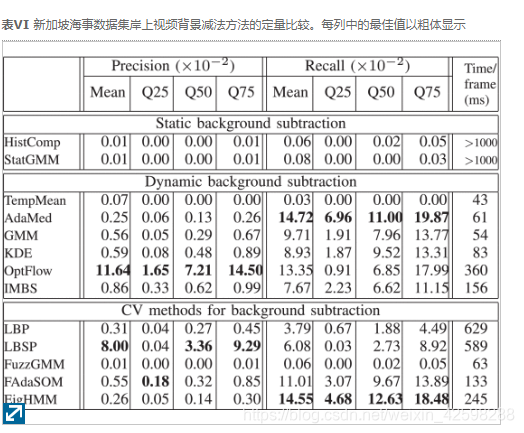
D、静态背景减法技术的比较
第四节、对象跟踪
LBSP和特征背景的组合可能有助于海事图像

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









