




在ROS RViz 环境中,可以使用一些可视化插件来显示坐标点信息,文字信息,以及机器人移动方向,速度等信息,RVIZ中能够使用的Marker主要有两种:
1. RVIZ标准marker软件包(功能简单,使用也相对容易)
2. 第三方Marker软件包(功能全面,使用较为复杂)
以下大体上介绍两个软件包的内容,以及官方说明链接.
*掌握了以下两种方式,基本上可以显示项目中遇到的各种信息.
1. ROS Rviz 官方Marker软件包:
(http://wiki.ros.org/rviz/DisplayTypes/Marker)
参考效果为:
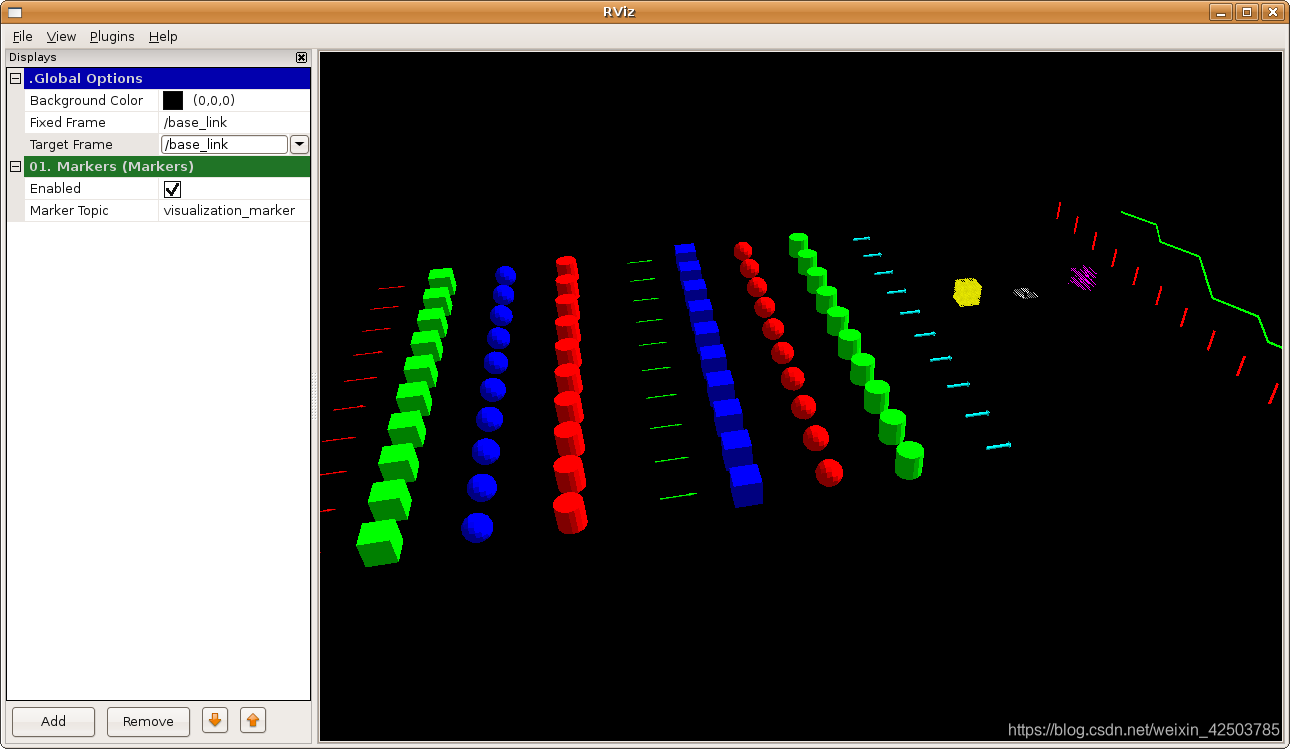
官方介绍页面:http://wiki.ros.org/rviz/DisplayTypes/Marker
官方教程,含代码: http://wiki.ros.org/rviz/Tutorials/Markers%3A%20Basic%20Shapes
2. ROS Rviz 第三
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









