




 本文基于UG和ADAMS软件,建立并分析驱动桥三维模型,涵盖主减速器和差速器,研究起步、直线行驶和转弯行驶工况下的动力学特性。通过Hertz接触理论模拟齿轮接触,仿真结果显示了不同工况下的速度、加速度和啮合力变化,为优化驱动桥性能提供依据。
本文基于UG和ADAMS软件,建立并分析驱动桥三维模型,涵盖主减速器和差速器,研究起步、直线行驶和转弯行驶工况下的动力学特性。通过Hertz接触理论模拟齿轮接触,仿真结果显示了不同工况下的速度、加速度和啮合力变化,为优化驱动桥性能提供依据。
点击蓝字关注“旺材动力总成”
来源 | EDC电驱未来
驱动桥是汽车总成中重要的组成部分,主要由主减速器总成、差速器、半轴和驱动桥壳等部分构成,其主要作用是将由传动轴传导来的转矩和力通过半轴分配到左右车轮,实现降低速度增大转矩的作用,同时改变转矩方向;当车辆转弯行驶时,差速器开始发挥差速作用,从而让左右驱动轮能以不同的速度转动实现转向。驱动桥中主减速器和差速器的性能会直接影响到车辆的整体性能表现,多数著作大都单独研究主减速器或者差速器的动态性能,少有将两者的装配总成一起研究的。
本文基于三维软件UG,完成了驱动桥主减速器主从动锥齿轮、差速器行星齿轮和半轴齿轮的三维几何模型的创建,得到了无干涉装配模型,再以通用的Parasolid图形交换格式导入到动力学软件Ad⁃ams中完成了驱动桥虚拟样机模型的构建,并在此驱动桥虚拟样机模型中融入Hertz接触理论,进而分析了驱动桥在不同工况下的运动学和动力学特性,为进一步研究驱动桥主减速器和差速器齿轮运动学和动力学特性提供了可靠依据,同时也为降低汽车后桥主减速器和差速器振动,优化其性能提供了技术支持。
1 三维模型的建立
1.1 差速器模型建立
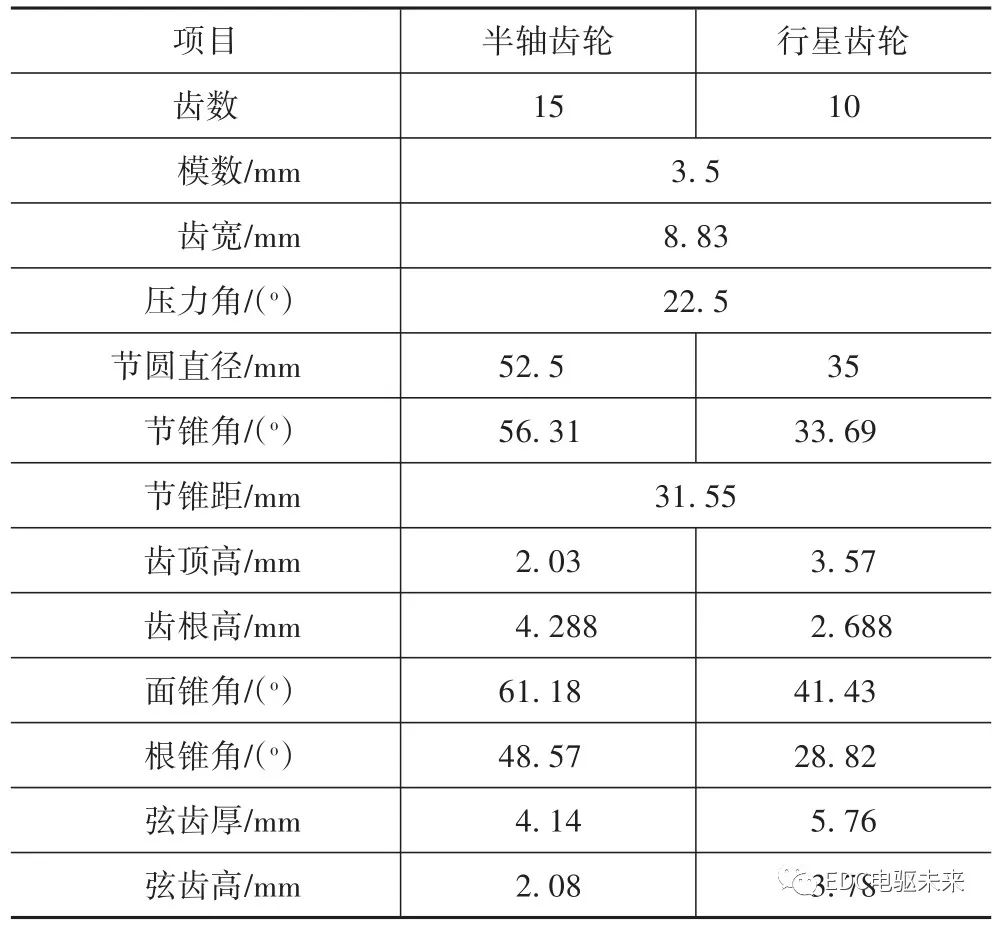
本文所述差速器包括4个行星齿轮、2个半轴齿轮和1个十字轴,采用参数化建模的方式,在UG里插入表达式,分别得到行星齿轮和半轴齿轮的三维模型,具体参数如表1所示。
表1 差速器齿轮主要参数
得到的差速器三维模型如图1所示。
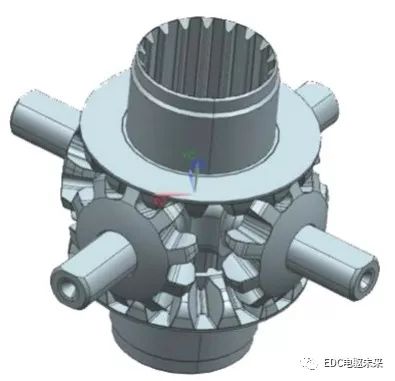
图1 差速器三维模型
1.2 准双曲面齿轮几何模型的建立
由于准双曲面齿轮是弧齿锥齿轮中最复杂的一种,传统的建模方法难度极高,而且没有结合实际加工参数,准确性没有得到验证。本文以小轮左旋、展成法加工,大轮右旋、成形法加工为研究对象,将刀刃在以坐标原点所建立坐标系下的数学表达式分别转化到大轮坐标系和小轮坐标系,推导出齿面方程,编写MATLAB程序求解得到齿面点坐标,导入到UG中,先建立单个齿形齿面,再通过后续的布尔运算和阵列等操作从而建立完整的准双曲面齿轮三维模型。由于文章篇幅有限,本文不再详述准双曲面齿轮具体的建模过程,准双曲面齿轮副基本参数见表2。
表2 准双曲面齿轮副主要参数
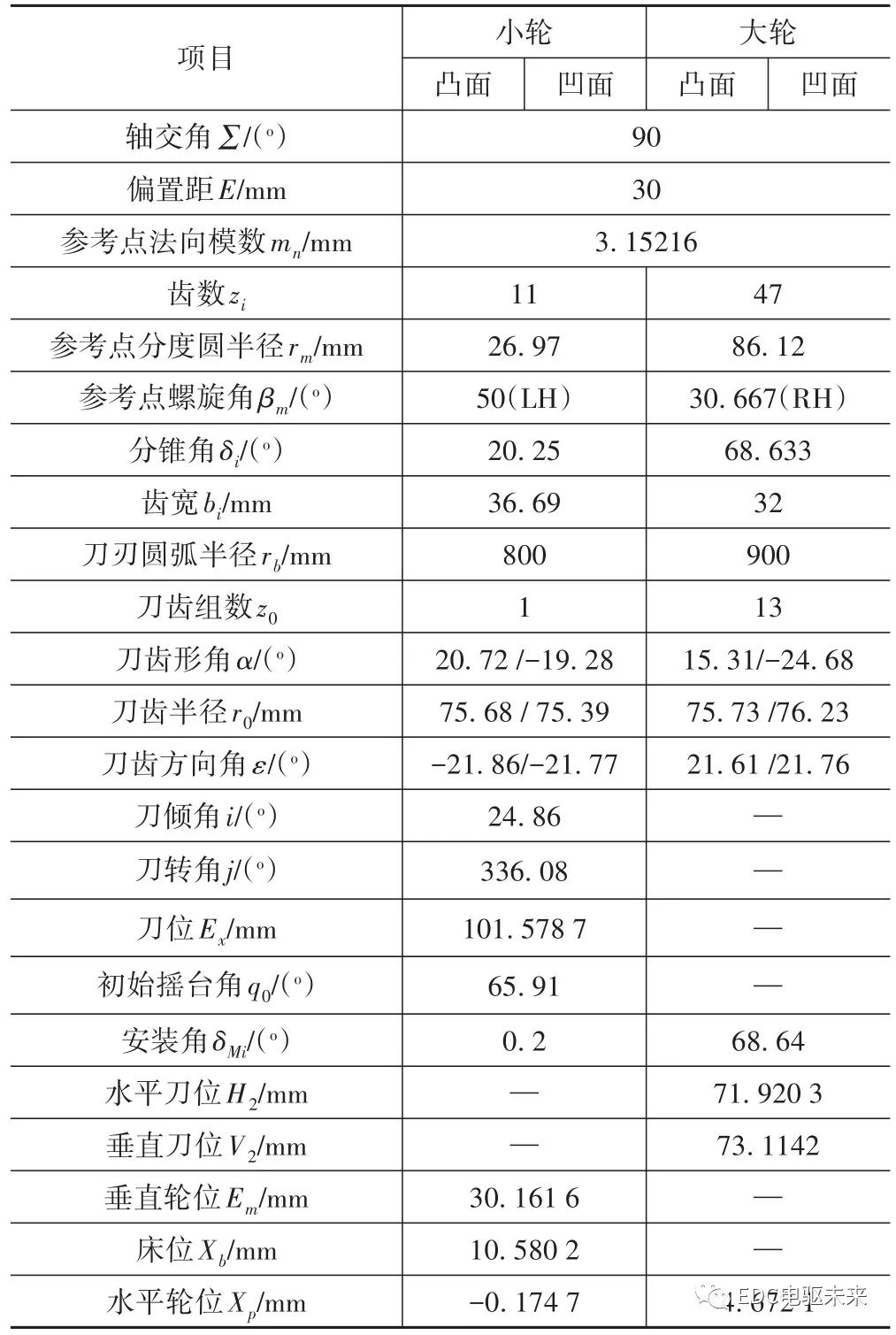
准双曲面齿轮传动副三维几何模型如图2所示。
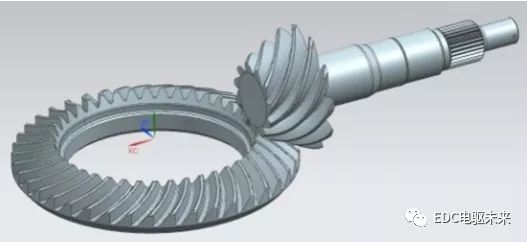
图2 准双曲面齿轮三维几何模型
最终得到主减速器主从动齿轮和差速器齿轮的无干涉装配模型,如图3所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 786
786

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









