




 本文详细介绍了卷积神经网络(CNN)的结构和原理,从输入层、卷积层、激励层、池化层、全连接层等方面进行阐述。探讨了CNN的发展历程,特别是R-CNN、SPP-Net、Fast R-CNN和Faster R-CNN在图像识别与定位中的应用。同时,通过CIFAR10数据集展示了CNN的实际分类代码实现。
本文详细介绍了卷积神经网络(CNN)的结构和原理,从输入层、卷积层、激励层、池化层、全连接层等方面进行阐述。探讨了CNN的发展历程,特别是R-CNN、SPP-Net、Fast R-CNN和Faster R-CNN在图像识别与定位中的应用。同时,通过CIFAR10数据集展示了CNN的实际分类代码实现。
1. 什么是CNN
卷积神经网络(Convolutional Neural Networks, CNN)是一类包含卷积计算且具有深度结构的前馈神经网络(Feedforward Neural Networks),是深度学习(deep learning)的代表算法之一。
我们先来看卷积神经网络各个层级结构图:
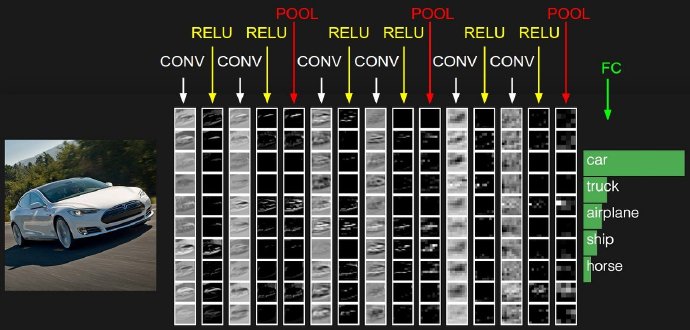
上图中CNN要做的事情是:给定一张图片,是车还是马未知,是什么车也未知,现在需要模型判断这张图片里具体是一个什么东西,总之输出一个结果:如果是车 那是什么车。
- 最左边是数据输入层(input layer),对数据做一些处理,比如去均值(把输入数据各个维度都中心化为0,避免数据过多偏差,影响训练效果)、归一化(把所有的数据都归一到同样的范围)、PCA/白化等等。CNN只对训练集做“去均值”这一步。
- CONV:卷积计算层(conv layer),线性乘积求和。
- RELU:激励层(activation layer),下文有提到:ReLU是激活函数的一种。
- POOL:池化层(pooling layer),简言之,即取区域平均或最大。
- FC:全连接层(FC layer)。
这几个部分中,卷积计算层是CNN的核心。
1.1 输入层
在做输入的时候,需要把图片处理成同样大小的图片才能够进行处理。
常见的处理数据的方式有:
-
去均值(常用)
- AlexNet:训练集中100万张图片,对每个像素点求均值,得到均值图像,当训练时用原图减去均值图像。
- VGG:对所有输入在三个颜色通道R/G/B上取均值,只会得到3个值,当训练时减去对应的颜色通道均值。(此种方法效率高)
**TIPS:**在训练集和测试集上减去训练集的均值。
-
归一化
幅度归一化到同样的范围。
-
PCA/白化(很少用)
- 用PCA降维
- 白化是对数据每个特征轴上的幅度归一化。
1.2 卷积计算层(conv)
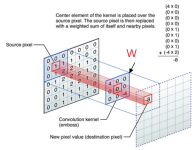
对图像(不同的数据窗口数据)和滤波矩阵(一组固定的权重:因为每个神经元的多个权重固定,所以又可以看做一个恒定的滤波器filter)做内积(逐个元素相乘再求和)的操作就是所谓的『卷积』操作,也是卷积神经网络的名字来源。
滤波器filter是什么呢!请看下图。图中左边部分是原始输入数据,图中中间部分是滤波器filter,图中右边是输出的新的二维数据。
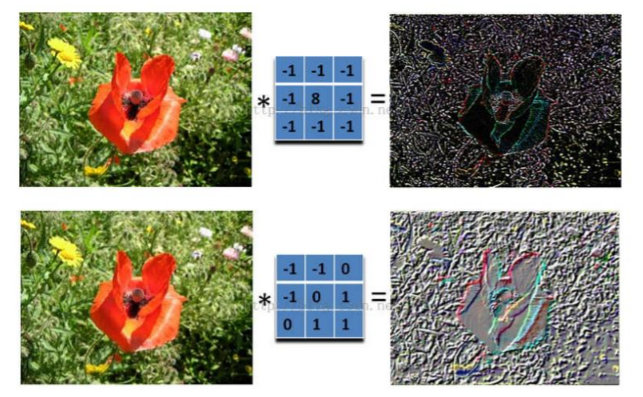
不同的滤波器filter会得到不同的输出数据,比如颜色深浅、轮廓。**相当于提取图像的不同特征,模型就能够学习到多种特征。**用不同的滤波器filter,提取想要的关于图像的特定信息:颜色深浅或轮廓。如下图所示。
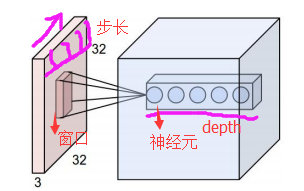
在CNN中,滤波器filter(带着一组固定权重的神经元)对局部输入数据进行卷积计算。每计算完一个数据窗口内的局部数据后,数据窗口不断平移滑动,直到计算完所有数据。这个过程中,有这么几个参数:
- 深度depth:神经元个数,决定输出的depth厚度。同时代表滤波器个数。
- 步长stride:决定滑动多少步可以到边缘。
- 填充值zero-padding:在外围边缘补充若干圈0,方便从初始位置以步长为单位可以刚好滑倒末尾位置,通俗地讲就是为了总长能被步长整除。
[外链图片转存失败(img-PpFhUbCh-1565505346071)(https://mlnotebook.github.io/img/CNN/convSobel.gif)]
-
参数共享机制
假设每个神经元连接数据窗的权重是固定对的。固定每个神经元连接权重,可以看做模板,每个神经元只关注一个特性(模板),这使得需要估算的权重个数减少:一层中从1亿到3.5万。
-
一组固定的权重和不同窗口内数据做内积:卷积
-
作用在于捕捉某一种模式,具体表现为很大的值。
卷积操作的本质特性包括稀疏交互和参数共享。
1.3 激励层
把卷积
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}