






1、Mac VMware Fusion
我们在使用虚拟机的时候,经常遇到这样的问题,我们会换地方,ip会变化,如果虚拟机使用桥接的方式,那么很多与ip相关的服务都会出现问题,所以我们希望使用nat模式,不过遗憾的是,在Windows下,VMware配置nat十分之方便,但是在Mac下,却有点麻烦,因为默认情况下,不支持我们配置静态ip,这对于我们来说就不太方便了。
2、Fusion配置Nat静态IP
2.1 创建Nat网络
首先我们进入VMware Fusion的配置界面(快捷键是Command+,),然后打开网络配置:

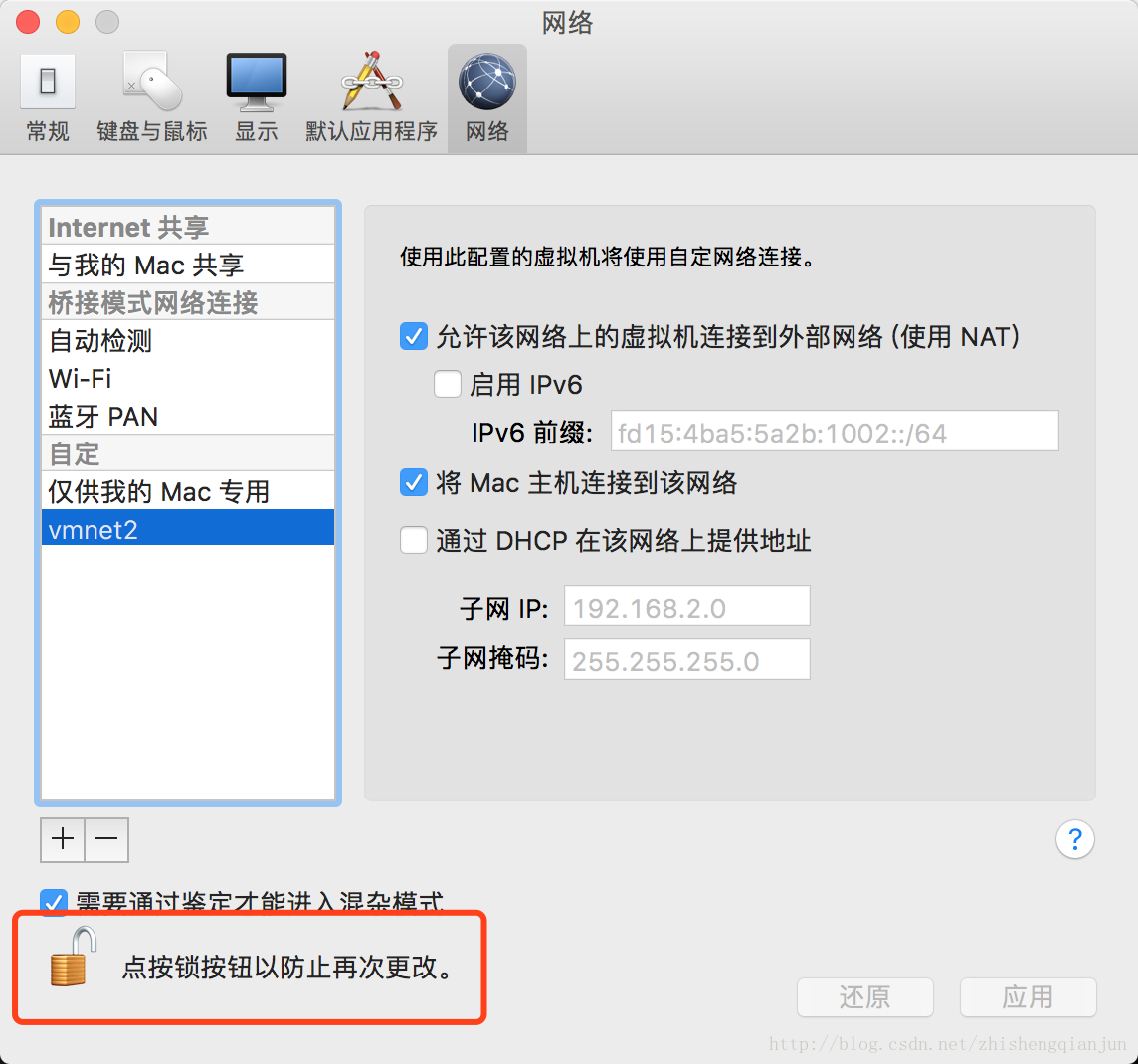
如上图,首先点击锁的按钮,进行解锁,需要输入密码才可以;

然后,我们点击+号,增加一个网络,在这里显示的是vmnet2,在其他机器可能是3,这一点不影响,然后,将上图所示的3代表的选项选中,将下面的DHCP的选项取消。
(注意:要配置静态ip,一定要取消DHCP选项!)
(PS:原文章说要取消勾选DHCP 但是我这边勾选了才能自定义自己ip)
2.2 修改Nat网络配置
然后,我们需要打开终端;
进入下面的目录:
cd /Library/Preferences/VMware\ Fusion/
- 1
( 注意:在路径中出现空格需要用\转义)
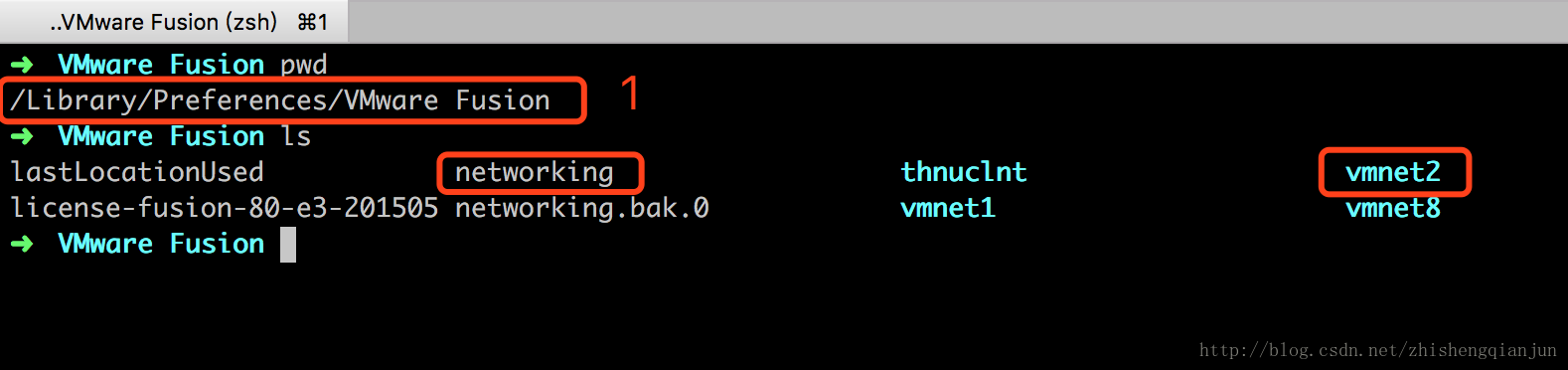
然后我们就能看到上面的配置文件,首先打开networking:
sudo vim networking
- 1
(注意:没有vim的用vi,一定记得加sudo,需要root权限才能修改)
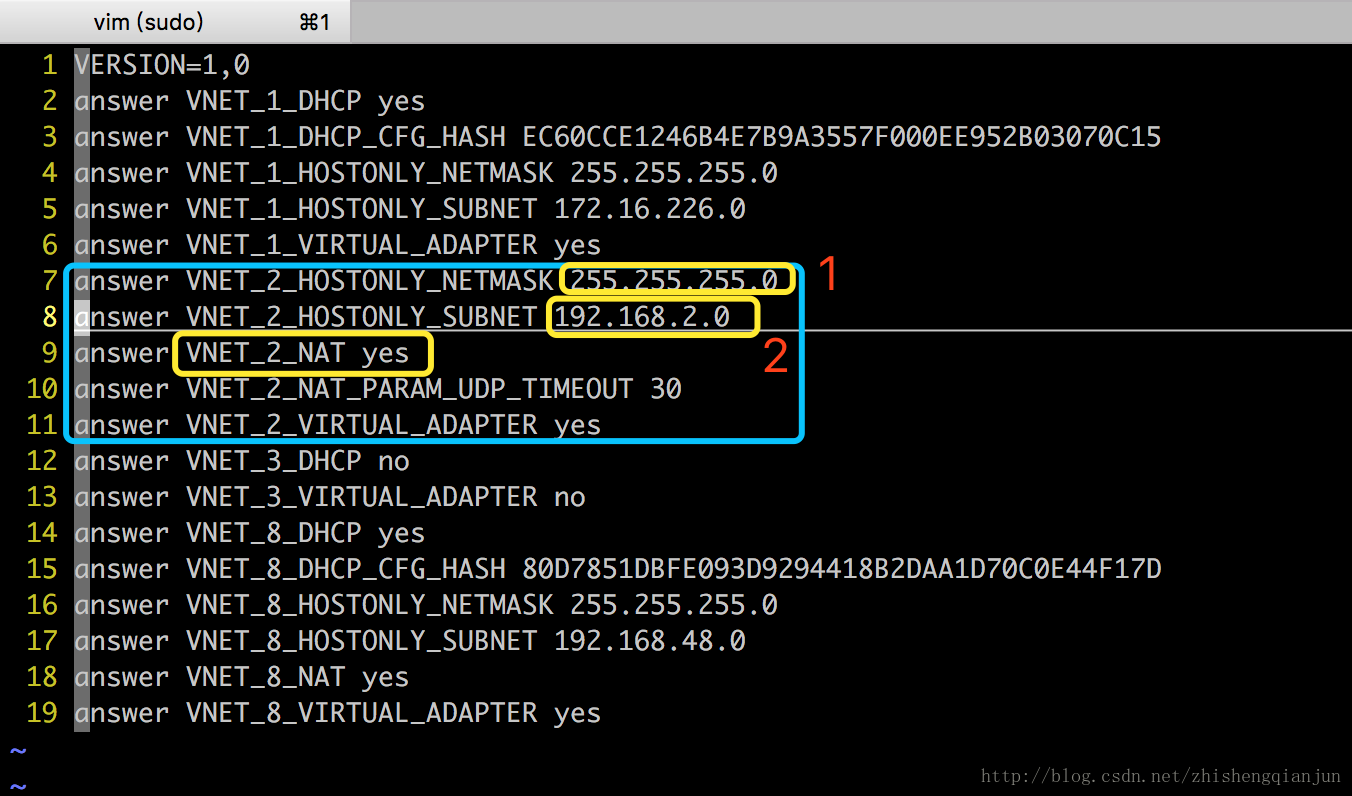
如上图,VNET_2开头的配置就是我们创建的那块网卡,标号为1的是子网掩码,标号为2的是子网地址,注意,是子网地址!
补充:
通过子网掩码划分子网,比如说3个255:
11111111.11111111.11111111.00000000
然后我们有一个ip,与上面的子网掩码进行与操作,如果是一样的,那么就代表是在一个网段中;
例如,192.168.2.1,192.168.2.2就是一个网段;
但是,192.168.2.1,192.168.3.2就不是一个网段,进行与操作以后,有个3是不一样的。
子网地址是子网的第一个地址,也就是说,如果是255.255.255.0,那么指望地址就是*.*.*.0,前面的*可以自己配置。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
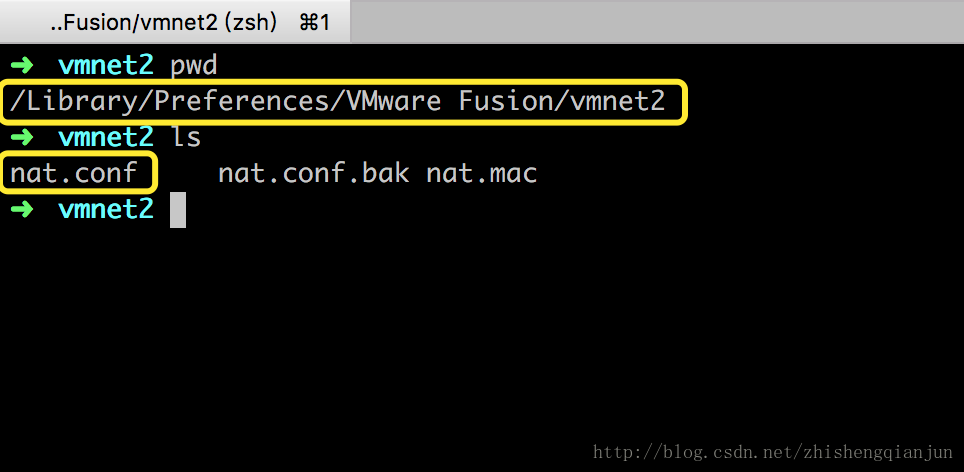
然后我们进入vmnet2,看到上图所示的配置文件;
sudo vim nat.conf
- 1
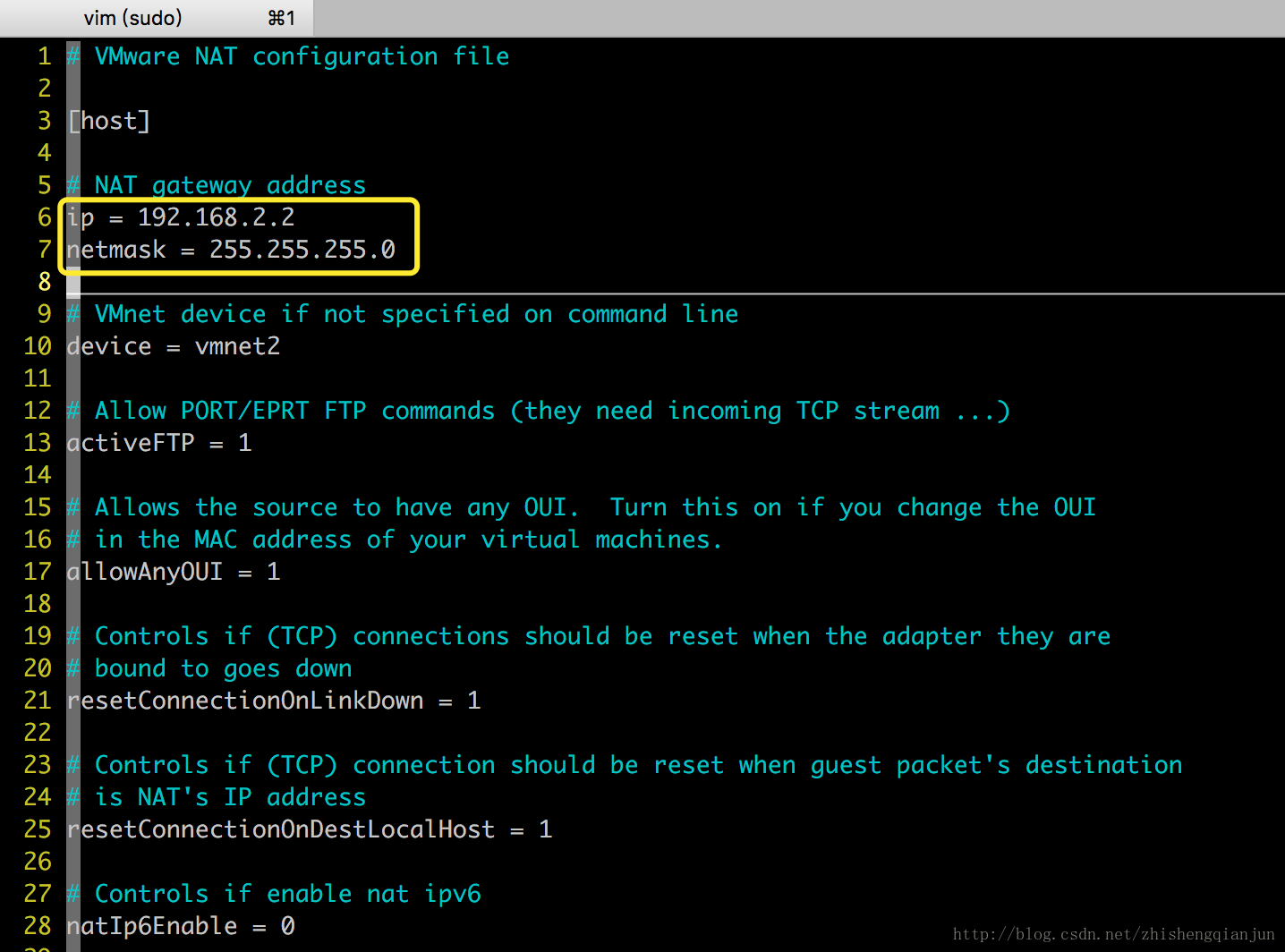
如上图所示,修改这里的配置即可,第一个是ip,这里的ip的网关,下面的是子网,与前面的子网掩码保持一致,上面的ip除了子网的第一个和最后一个ip不能用,其他都可以用,这里我们配置为192.168.2.2。
还有一个重要的步骤,重新打开VMware的网络配置,如下图:
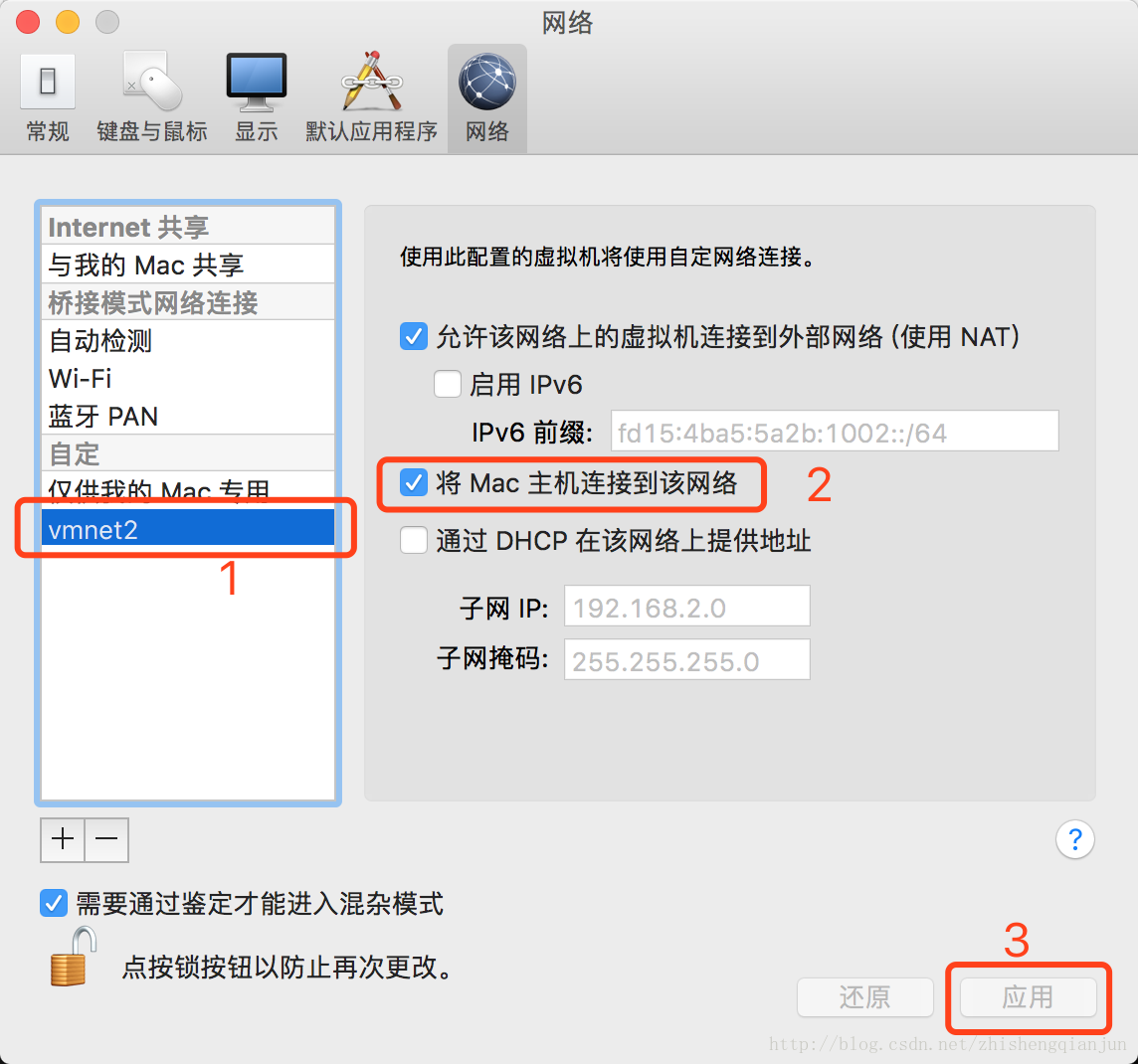
为了让VMware更新我们手动修改的配置,首先我们选中这个网络,然后将2所示的选项取消选中,这是后3会被点亮,点击应用,然后在将2选中,再点击应用,这样网络配置就更新了。
(实际上不更改配置,就是为了点击应用,让VMware更新一下配置)
2.3 虚拟机网络配置
接下来,我们来配置一下虚拟机,目前我装的是CentOS 7.3 1611,首先打开虚拟机的配置选项(快捷键是Command
+E):

打开网络,显示下图所示的选项:

然后选中我们配置的网络:vmnet2。
2.4 虚拟机网络配置
然后我们打开虚拟机,进入下面的目录,找到网卡的配置文件:

打开网卡的配置文件:
vi ifcfg-ens33
- 1
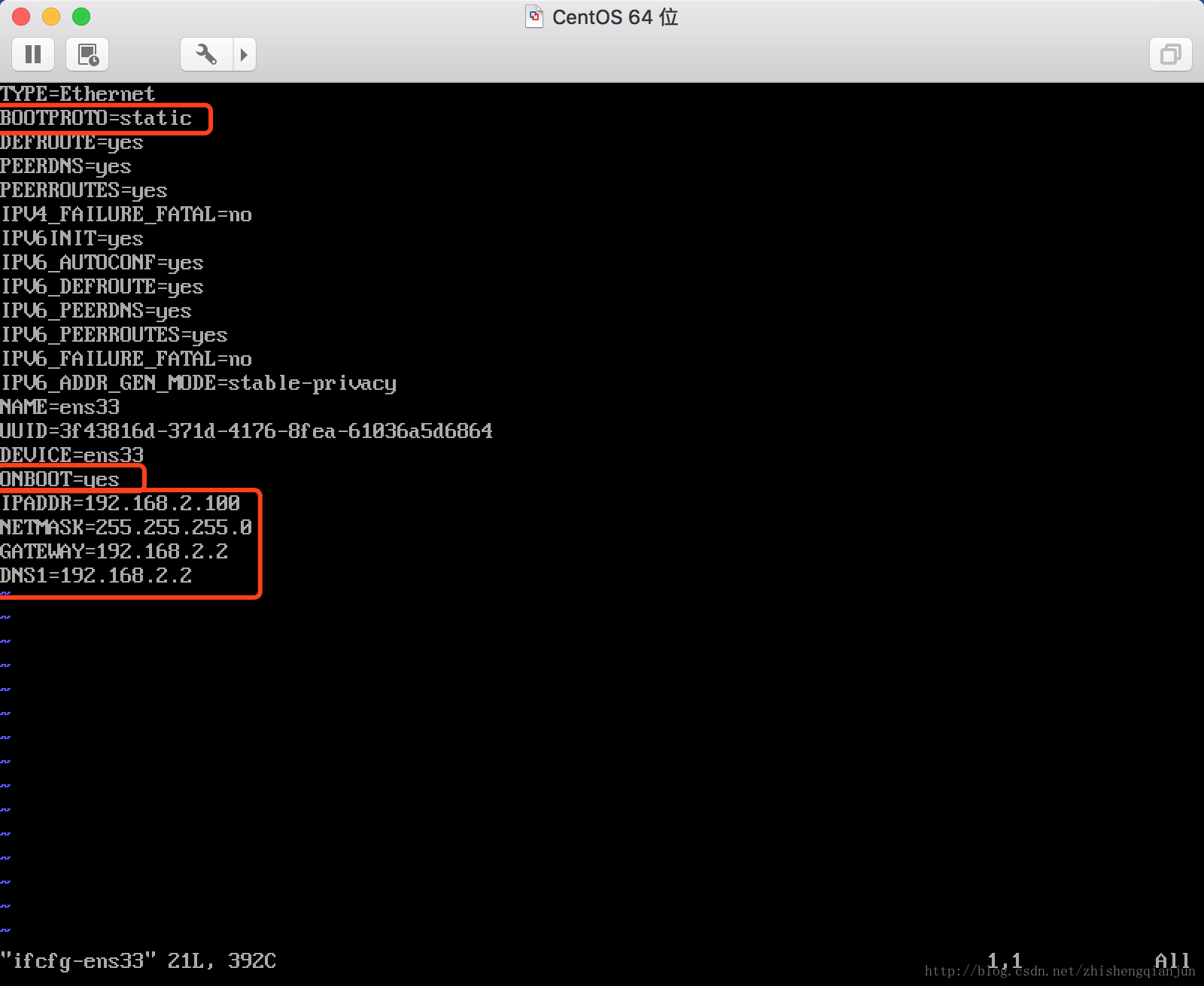
如上图,其中子网掩码要与之前保持一致,然后ip只要在同一网段就可以,网关和DNS配置到我们之前配置的网关上去。
重启网络生效:
systemctl restart network
- 1
查看ip:
ip a
- 1
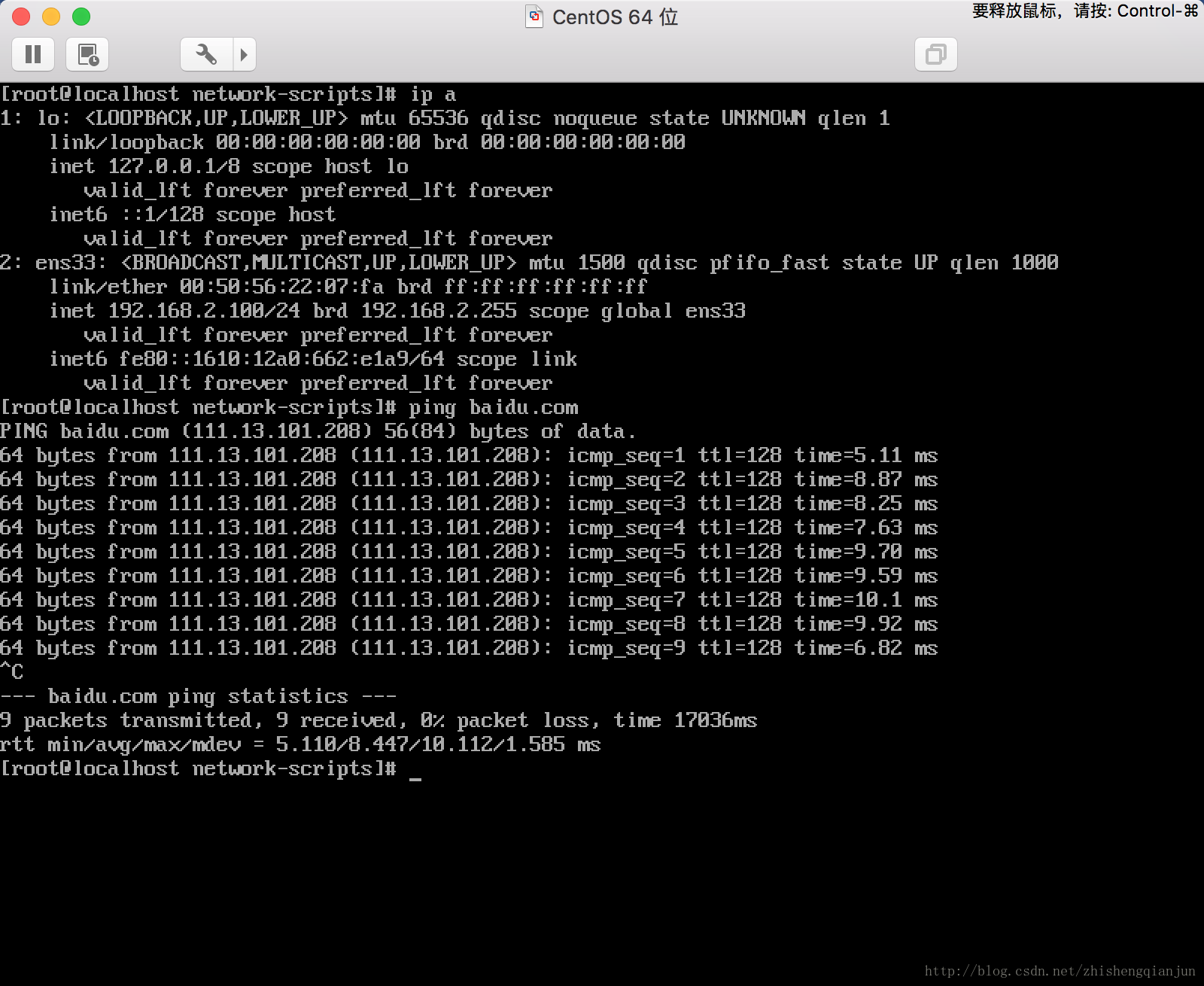
至此就大功告成了!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









