




 本文介绍了C++中常用的基础函数,如strlen(), sizeof() 和 sscanf() 的使用方法,同时详细讲解了pair数据结构的功能及用法,以及动态内存分配函数malloc()和new的操作方式。
本文介绍了C++中常用的基础函数,如strlen(), sizeof() 和 sscanf() 的使用方法,同时详细讲解了pair数据结构的功能及用法,以及动态内存分配函数malloc()和new的操作方式。
strlen()函数计算的是mesg字符串的长度,不包括"\0".
而sizeof()是测字符串长度包括"\0".
pair用法
类模板:template <class T1, class T2> struct pair
参数:T1是第一个值的数据类型,T2是第二个值的数据类型。
功能:pair将一对值组合成一个值,这一对值可以具有不同的数据类型(T1和T2),两个值可以分别用pair的两个公有函数first和second访问。
【定义】
pair<int, double> p1; //使用默认构造函数
pair<int, double> p2(1, 2.4); //用给定值初始化
pair<int, double> p3(p2); //拷贝构造函数
【访问元素】
pair<int, double> p1; //使用默认构造函数
p1.first = 1;
p1.second = 2.5;
cout << p1.first << ' ' << p1.second << endl;
输出结果为:1 2.5
【赋值】
①利用make_pair:它一般都使用在需要pair做参数的位置,可以直接调用make_pair生成pair对象
pair<int, double> p1;
p1 = make_pair(1, 1.2);
②变量间赋值
pair<int, double> p1(1, 1.2);
pair<int, double> p2 = p1;
关于动态申请内存malloc的知识
头文件
#include <stdlib.h>
void* 表示未确定类型的指针,void *可以指向任何类型的数据,更明确的说是指申请内存空间时还不知道用户是用这段空间来存储什么类型的数据(比如是char还是int或者其他数据类型)。
格式:void *malloc(size_t size);
①int *p; p = (int*)malloc(sizeof(int) * 128);
申请数组:分配128个(可根据实际需要替换该数值)整型存储单元,并将这128个连续的整型存储单元的首地址存储到指针变量p中
②double *pd = (double*)malloc(sizeof(double) * 12);
申请数组:分配12个double型存储单元,//并将首地址存储到指针变量pd中
③tree *root=(tree*)malloc(sizeof(tree));
申请根节点:不是数组,不需要声明申请空间
new则不然,是c++的关键字,它本身不是函数。new不依赖于头文,new 返回指定类型的指针,并且可以自动计算所需要大小
int *p;
p = new int;//返回类型为int *类型(整数型指针),分配大小为sizeof(int);
sscanf用法
#include<cstdio>
using namespace std;
int main()
{
// 常见用法
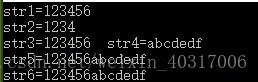
char str1[512] = { 0 };
sscanf("123456", "%s", str1);
printf("str1=%s\n", str1);
//取指定长度的字符串。如在下例中,取最大长度为4字节的字符串。
char str2[512];
sscanf("123456", "%4s", str2);
printf("str2=%s\n", str2);
//取到指定字符为止的字符串。取遇到空格为止字符串,拆分成两个字符串放入两个字符串数组中
char str3[512], str4[512];
sscanf("123456 abcdedf", "%s %s", str3,str4);
printf("str3=%s str4=%s\n", str3,str4);
// 取到指定字符集为止的字符串。如在下例中,取遇到大写字母为止的字符串。也就是大写字母不取。
char str5[512];
sscanf("123456abcdedfBCDEF", "%[^A-Z]", str5);
printf("str5=%s\n", str5);
// 取仅包含指定字符集的字符串。如在下例中,取仅包含1到9和小写字母的字符串。
char str6[512];
sscanf("123456abcdedfBCDEF", "%[1-9a-z]", str6);
printf("str6=%s\n", str6);
}

















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









