




 这篇博客介绍了H桥电路的工作原理和在电机驱动中的应用,重点讲述了LM298N驱动模块如何实现直流电机的正反转控制。通过电路分析和示意图,阐述了三极管在H桥电路中的作用,以及如何通过控制信号实现电机的转动方向。此外,还讨论了在选择驱动芯片时应考虑的因素。
这篇博客介绍了H桥电路的工作原理和在电机驱动中的应用,重点讲述了LM298N驱动模块如何实现直流电机的正反转控制。通过电路分析和示意图,阐述了三极管在H桥电路中的作用,以及如何通过控制信号实现电机的转动方向。此外,还讨论了在选择驱动芯片时应考虑的因素。
这一节我们主要介绍H桥电路,后面的章节我们会专门介绍到PWM调速问题。
3、H桥电路
电机做好后后引出两个极,如图5所示,给两个极能电就能够实现其转动,而改变其电源极性刚可以实现换向。

图5减速电机及电路图
前面我们说过必须要解决驱动力不足和换向问题,设计一般会采用两种方法,一是设计由分离元件组成的驱动电路实现,另一种方法则是采用专用的驱动芯片加以实现。由于专用的驱动芯片由于结构简单、价格便宜、可靠性高等特点,因而被广泛的应用实现电机的驱动。电机的驱动芯片很多如L298N、BST7970、MC33886等,这里我们介绍智能机器人中比较常用的LM298N驱动模块,BST7970、MC33886一般在电机功率比较大的场合适用。在介绍LM298N驱动模块之前,我们先介绍一下H桥电路,需要说明的是时,在下面的电路由于内部采用了三极管,三极管本身起到放大的作用,即增大了驱动电流,所以在下面的讲解中我们主要侧重讲解如何实现换向功能。
H桥电路可以用如图6来表示其原理:
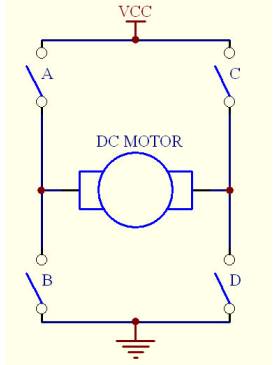
图6 H桥简单电路
从图中可以看出,其形状类似于字
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4388
4388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









