






 本文档详细介绍了如何使用QGroundControl进行UAVCAN电源配置。首先切换到Setup视图,然后选择电源配置并点击开始分配。在第一次蜂鸣声后,按照正确的转向快速转动第一个电调上的螺旋桨。每个电调被列举时会发出蜂鸣声,按照motormap顺序对所有电机控制器重复此过程。对于运行Sapog固件的电调,需要重新启动以应用新的列举ID,这一步只需做一次,升级固件后不需要重复。
本文档详细介绍了如何使用QGroundControl进行UAVCAN电源配置。首先切换到Setup视图,然后选择电源配置并点击开始分配。在第一次蜂鸣声后,按照正确的转向快速转动第一个电调上的螺旋桨。每个电调被列举时会发出蜂鸣声,按照motormap顺序对所有电机控制器重复此过程。对于运行Sapog固件的电调,需要重新启动以应用新的列举ID,这一步只需做一次,升级固件后不需要重复。
# UAVCAN 列举与配置
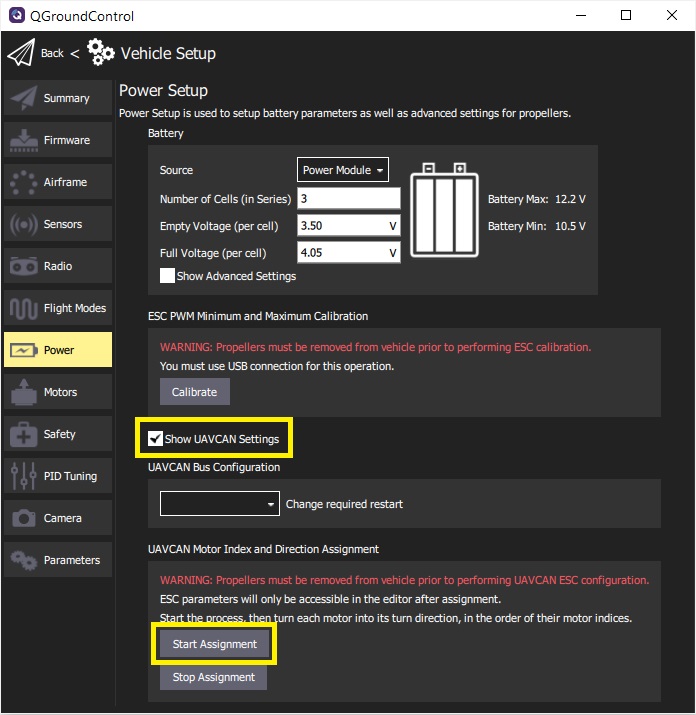
Use QGroundControl and switch to the Setup view. Select the Power Configuration on the left. Click on the 'start assignment' button. 选择左侧的电源配置。 单击“开始分配”按钮。
:::
第一次发出蜂鸣声后,将第一个电调上的螺旋桨迅速转到正确的转向。 每次列举时,电调都会发出蜂鸣声。 按照 motor map 所示的顺序对所有电机控制器重复此步骤。
After the first beep, turn the propeller on the first ESC swiftly into the correct turn direction. The ESCs will all beep each time one is enumerated. Repeat this step for all motor controllers in the order as shown on the motor map. ESCs running the Sapog firmware will need to be rebooted after enumeration for the new enumeration ID to be applied. This step has to be performed only once and does not need to be repeated after firmware upgrades.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









