



 本文介绍了如何在Matlab 2019b环境下使用状态空间方法处理线性系统,包括状态空间基础概念、状态向量与方程的建立、齐次状态方程的求解、线性系统的能控能观性判定及其标准型转换。通过实例演示和代码实现,帮助读者理解并应用到实际问题中。
本文介绍了如何在Matlab 2019b环境下使用状态空间方法处理线性系统,包括状态空间基础概念、状态向量与方程的建立、齐次状态方程的求解、线性系统的能控能观性判定及其标准型转换。通过实例演示和代码实现,帮助读者理解并应用到实际问题中。
本文内容:状态空间方程求解与能控能观性分析
操作环境:matlab2019b
一、状态空间基础
在经典控制理论中,用传递函数来设计和分析单入单出系统,这是一种行之有效的办法。但只能反应系统外部的输入输出关系,不能反应系统内部关系,且需建立在零初始条件下,所以不适用于多变量和时变系统。
在现代控制理论中用状态变量来描述系统,为时变和多变量系统提供了有力的工具。
状态:动力学的状态定义为信息的合集,每一个时刻的状态是唯一确定的
状态变量:能够完全描述系统状态的最小一组变量
状态向量:如果描述一个给定系统的状态需要n个状态变量,那么这些状态变量可以看成是向量x(t)的各个分量

状态空间:以各状态变量作为坐标轴所组成的n维空间叫做状态空间。状态向量则可用空间中的一个点来表示
建立系统的状态空间方程:大家可以参考以下链接,本文主要介绍matlab代码实现就不赘述了
现代控制理论3--系统动态方程的建立_hongliyu_lvliyu的博客-优快云博客blog.youkuaiyun.com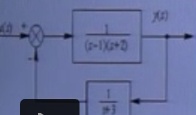
这里介绍matlab中状态空间方程的建立和传递函数与状态空间方程的转换
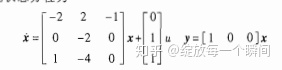
例:
a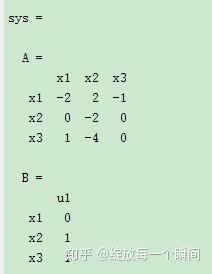
把传递函数转换为状态空间:可以用tf2ss或者zp2ss
如零、极点形式:
z二、状态空间方程求解
齐次状态方程:x`=Ax
其解为: x(t)=e^at · x(0)
解法:
方法一:幂级数法(设齐次状态方程的解是t的向量幂级数)

其中e^At,又称为矩阵指数函数/状态转移矩阵
方法二:拉氏变化法

可以发现,两种方法的结果是相同互通的

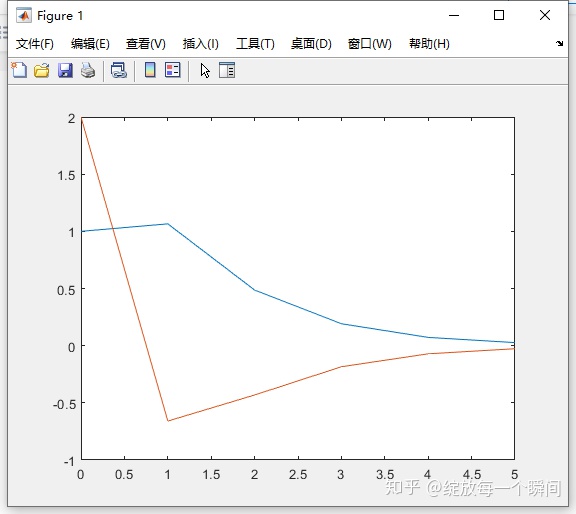
matlab求解:
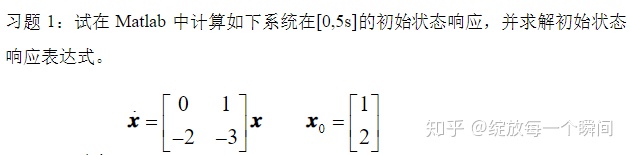
syms 求解得
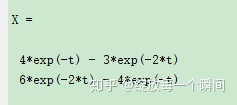
图像为:
三、线性系统的能控性和能观性
1.能控性与能观性
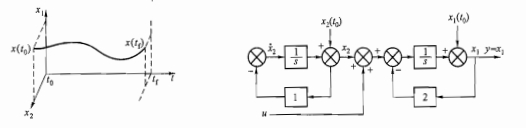
能控性:一个线性定常系统(A B C)在有限时间间隔t0 ≦ t ≦ tf 内,存在无约束的分段容许连续控制函数 u(t) ,能使系统从任意初态 x(t0)=x0 转移到终态 x(tf)=x1,则称系统是状态完全能控的,简称能控的
能控性判据:

能观性:一个线性定常系统(A B C)在有限时间间隔t0 ≦ t ≦ tf 内,能够根据输出值y(t)和给出的u(t),能够确定系统的初始状态x(t0)的每一个分量,则称系统为完全能观测的,简称不可观测。
能观性判据:

matlab代码实现:
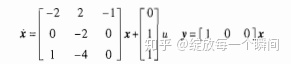
例如判断系列状态方程的能控能观性
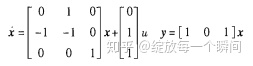
A可以输出n1=3 ,n2=3,系统能控能观
2.能控(能观)标准型
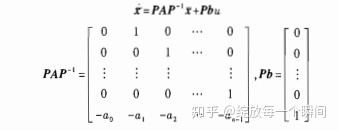
能控标准型:
一个单输入系统,如果其A,B阵具有以下标准形式:

则系统一定可控
如果系统可控,则一定能找到一个可逆线性变换,将其变化为可控标准型
变化步骤为:
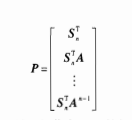
a.由能控性矩阵求逆


b.得到变换阵P
c.进行坐标变换
如:
a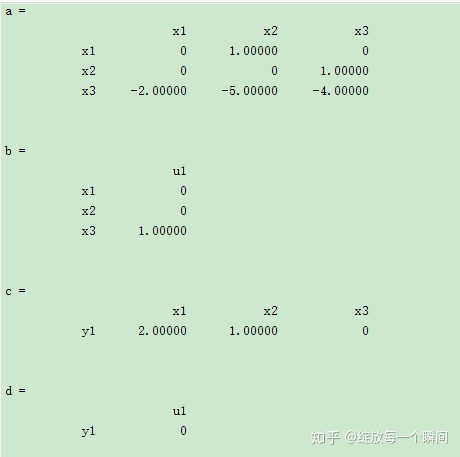
能观标准型:
一个单输入系统,如果其A,C阵具有以下标准形式,则系统一定能观

因为能控性系统和能观性系统满足对偶定理,这里不再赘述能观标准型的转换。
本文为小编自行编程,如有错误还请大家批评指出~
待更新~下一篇为“matlab中控制系统的状态空间分析2”


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









