






 本文介绍了机器视觉中Halcon的相机标定过程,包括相机畸变的原理和如何通过算法减少畸变。通过标定板进行标定,将像素单位转换为实际尺寸。详细讲解了如何在Halcon助手中标定相机,涉及图像采集、标定板参数设置以及实时标定。最后,讨论了标定结果的应用,包括消除畸变和转换到世界坐标系的方法。
本文介绍了机器视觉中Halcon的相机标定过程,包括相机畸变的原理和如何通过算法减少畸变。通过标定板进行标定,将像素单位转换为实际尺寸。详细讲解了如何在Halcon助手中标定相机,涉及图像采集、标定板参数设置以及实时标定。最后,讨论了标定结果的应用,包括消除畸变和转换到世界坐标系的方法。
第二节 相机标定
3.2.1 简单的啰嗦几十句
有时候我啰嗦归啰嗦,但是不代表说的话是废话。所以该看的你还是得看一下的,老铁。比如接下来的话:第一、不管多好的相机,硬件传感器拍摄出来的照片都是有畸变的,这个畸变大体分两种(桶形畸变和枕形畸变),为什么会这样呢?不是我要讲解的重点。你只要知道,畸变肯定有,质量越好的相机畸变越小,但是畸变可以通过算法减少甚至消除。第二、相机拍摄出来的照片的单位都是像素,你用相机拍了一个物体,然后你可以轻松通过图像处理求出这个物体的长多少个像素,宽多少个像素。但是你不知道长多少厘米,宽多少厘米。对的,这里面有一个坐标系之间的转换,你会吗?数学水平够吗?不够?没事,编写halcon那群程序员早就知道你弄不来。所以他们在助手里面又助了你一手:这一手就是标定。
怎么玩呢?首先:你得固定好你的相机的位置,然后调整好物距,焦距,让被测物能清晰显示。固定好就不要再动了。然后你要准备一块标定板。把标定板放到相机视野下拍摄照片。这块标定板上面的图案的物理尺寸你是知道的,然后相机拍下来后对应多少的像素尺寸,你也知道了。这两者之间一转换,就是对应关系了。当然怎么转换你不用管。转换完之后怎么表达这个转换关系,你也不用管,halcon助手帮你搞定。
3.2.2 言归正传
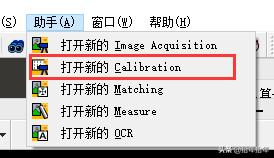
图 3-2-2-1
如上图(3-2-2-1),打开助手里面的第二个:"新的Calibration"。就会弹出下图(3-2-2-2),第一个红框框中第一排是标定板的描述文件,就是前面说的标定板的各种参数,你得告诉halcon嘛,(这个文件怎么获取呢?详见本节TIPS 1),其次是你那块板的厚度,你用卡尺卡一下就知道啦。第二个框里面是你像元的宽高,相机的参数文档里面会有的,你得自己找一下。焦距是镜头参数,一般镜头上都有的&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









