



 本文探讨了在轨道牵引动力系统中,永磁牵引电机控制技术的挑战,重点介绍了特定谐波消除脉宽调制(SHEPWM)技术,用于低开关频率下的电机控制。通过Simulink仿真验证了SHEPWM的控制效果,并讨论了不同模式间的切换过渡策略,以减少电流冲击。
本文探讨了在轨道牵引动力系统中,永磁牵引电机控制技术的挑战,重点介绍了特定谐波消除脉宽调制(SHEPWM)技术,用于低开关频率下的电机控制。通过Simulink仿真验证了SHEPWM的控制效果,并讨论了不同模式间的切换过渡策略,以减少电流冲击。
引言
在轨道交通牵引控制系统中,牵引变流器所承受直流侧供电母线电压较高,其输出功率也较大。牵引变流器通常会选择电压等级比较高的功率模块,比如3300V模块或6400V模块。高压功率模块的开关损耗和散热制约了其开关频率的应用,其开关频率较低(一般低于1K)。
为满足功率模块的低开关频率限制和轨道车辆宽范围调速运行的要求[1,2,3],牵引变流器在驱动动力电机时一般采用多模式脉宽调制技术,即:低频段采用异步调制(SVPWM),中频段采用同步调制(非优化PWM或优化PWM),高频段采用单脉冲控制的多模式混合脉宽调制技术,如图1所示。
仅在低速段采用SVPWM调制控制技术,当电机转速继续升高时,不能满足条件:开关频率/电机电频率>15,如果继续采用SVPWM调制技术,电机的谐波转矩会显著增大,控制稳定性变差。一般采用同步脉宽调制(优化PWM或非优化PWM调制技术)以保证三相电流波形对称,降低尖峰电流和转矩脉动,也可以自然过渡到高频段时的方波控制(单脉冲调制)阶段[4,5,6]。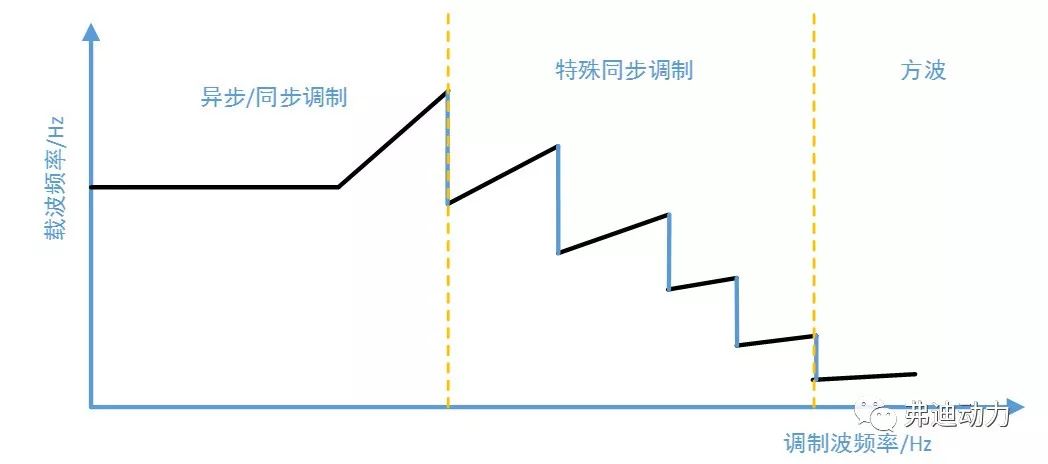
图1 多模式混合调制技术示意图
多模式混合脉宽调制在实际工程实践中异常复杂。在工程实现时,脉冲发波方式需要根据负载牵引电机转速多次变换,同时必须保证各调制模式间的平滑过渡,避免引起牵引电机电流和功率的冲击,这些工程实现方法及处理手段一直以来是牵引控制系统的核心技术。
轨道牵引传动动力系统目前主流使用的是异步牵引电机驱动控制系统。永磁牵引电机控制技术鲜有文献涉及。永磁牵引电机控制技术的开发主要难点在于:低开关频率下电机控制性能的研究,不同模式间的切换处理,牵引逆变器单脉冲调制输出电压饱和情况下牵引电机转矩控制,低开关频率下的数字控制时延影响,失效模式处理,带速重投等。一些在电动汽车驱动控制过程中未曾遇到的问题可能会在低开关频率下的牵引传动中显现[7],本文主要关注低开关频率下特殊脉宽调制技术在永磁同步牵引电机上的应用。
1
特定谐波消除脉宽调制技术
在牵引动力控制系统中,脉宽调制技术的优劣直接会影响牵引传动系统的性能。在特殊同步调制方面,主要有非优化PWM技术(例如中间60°SPWM调制技术)和优化PWM技术(例如SHEPWM调制技术)在永磁同步牵引电机中的应用[1,2]。特定谐波消除技术(SHE)较为广泛应用于受开关损耗限制的大功率驱动系统,特定谐波消除脉宽调制技术可以实现功率模块极低的开关频率,同时消除指定的低次谐波。其工程实践首先需要将SHEPWM的开关角离线进行计算,通过傅里叶分解得到的超越方程组,对方程组进行求解,获得相应的开关角度值,该开关角度值可以在离线仿真中进行验证。特定谐波消除技术因计算量比较大,很难在线实时求解,为了芯片运行效率与控制实时性,在工程实践中通常将开关角存储在程序中,以便在线查表备用。以11分频、7分频、5分频、3分频为例,建立相应的超越方程组[7,8],求解获得的开关角如图2所示。
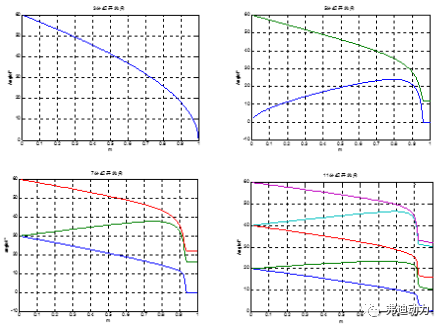
图2 各分频下开关角示意图
基于存储于芯片中的开关角度,在控制牵引电机运行时,可以通过调制度、电压相位、旋转角度查到相应的开关角以重新构建PWM脉冲序列,从而实现电机的控制。11分频、7分频、5分频、3分频的一个周期内的脉冲序列如图3所示。
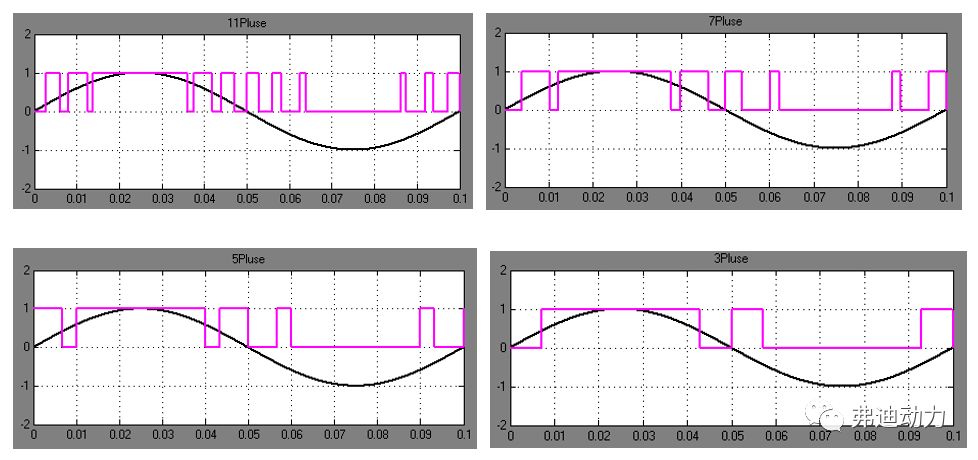
图3 SHEPWM调制方式示意图
2
仿真分析
基于Simulink搭建相应的永磁同步电机牵引控制仿真模型,对SHEPWM控制算法进行仿真验证,当电机运行在3000rpm下,以7分频、11分频为例进行相关的调试。电流开环控制状态下,给定电压Ud=-240V,Uq=200V,仿真获得各分频下电流波形情况如图4~5所示。
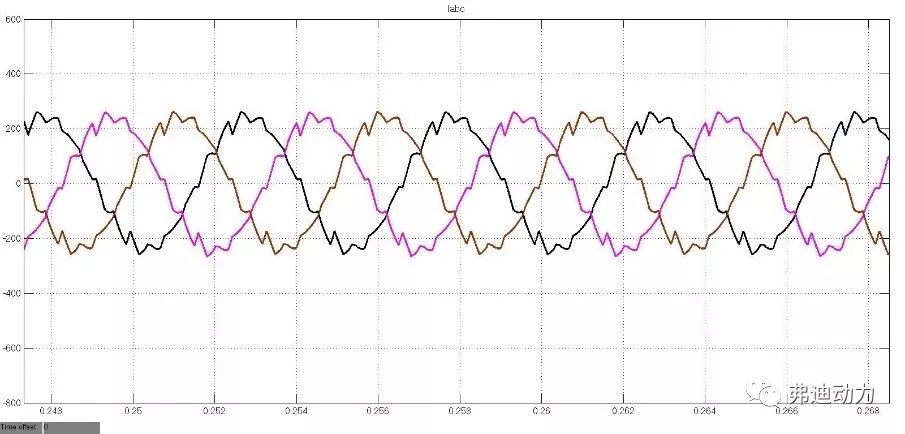
图4 三相电流@7分频开环控制
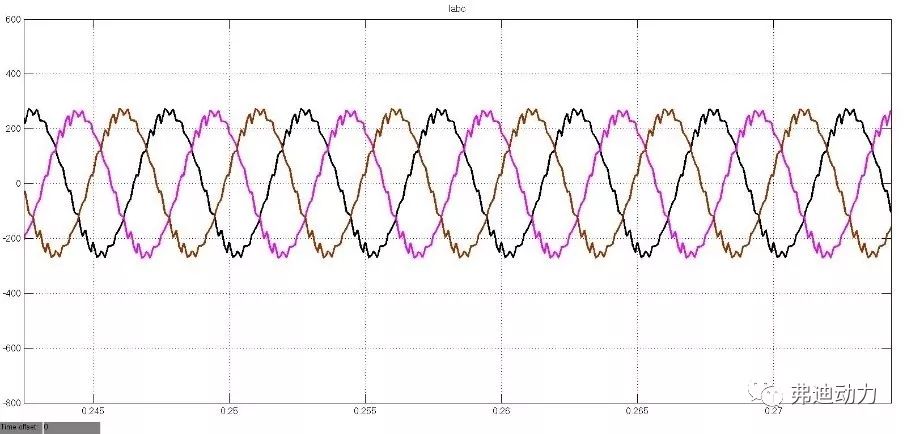
图5 三相电流@11分频开环控制
当电机运行在3000rpm下,以7分频为例对电机闭环控制进行仿真调试,给定电流Id=-212A,Iq=100A时,仿真获得7分频下的扭矩输出情况和交直轴电流情况,如图6~7所示。
图6 输出扭矩@7分频
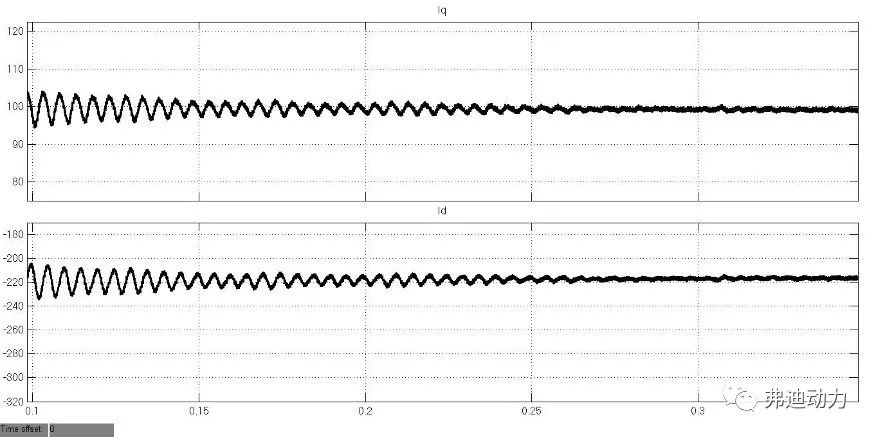
图7 dq轴反馈电流@7分频
3
各分频间切换仿真
采用多模式混合脉宽调试方式,需要考虑到不同模式间的切换过渡问题,为了保证在切换的过程中尽量减小电流冲击,在切换点前后不仅需要保持基波电压相位的连续性,还要保证谐波电流的相位连续性。SVPWM异步调制切换到SVPWM同步调制方式的切换实现相对比较容易,因为在切换点前后载波频率相同,切换点选择在任意时刻都不会引起电流较大的冲击,在实践过程中,各种变载波控制的应用也验证了该切换方法的实用性,在此不再做深入探讨。同步SVPWM调制方式切换到SHEPWM特定消谐调制方式的过程中,需要考虑三相电压基波都需要保持连续性,在SHEPWM调制方式不同分频间切换时,也需要考虑三相电压基波的连续性。
在仿真模型中设定好不同分频间的切换,运行过程中,自动进行11--> 7--> 5--> 3分频之间的切换。切换相位要根据实际调试情况来定,以使其电流和电压连续,从而减小扭矩冲击。可以对切换相位进行微调[9,10],在此选择切换相位为290°,仿真获得相应的三相电流波形与切换标识如图8所示,电机输出的电磁扭矩波形如图9所示。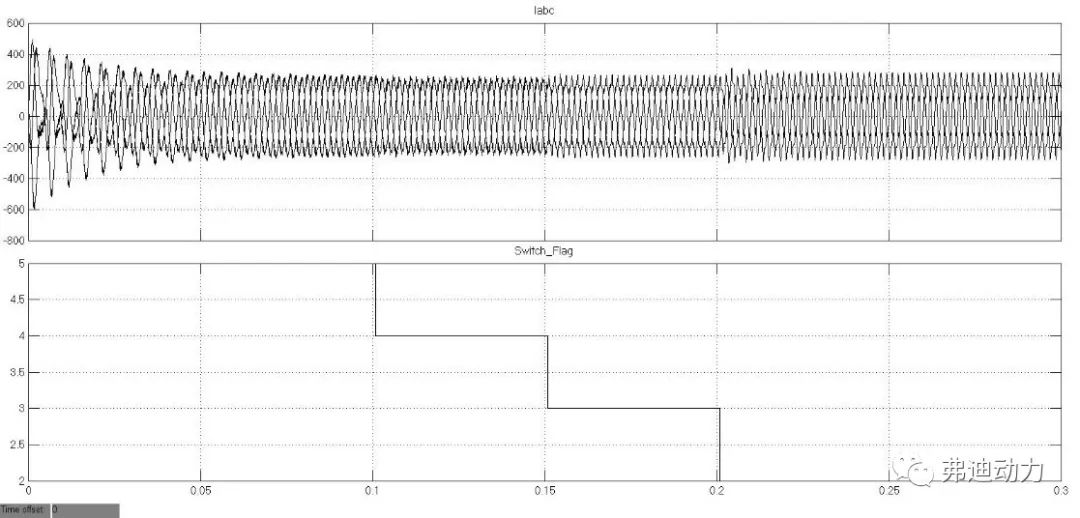
图8 切换前后的三相电流波形与切换标识
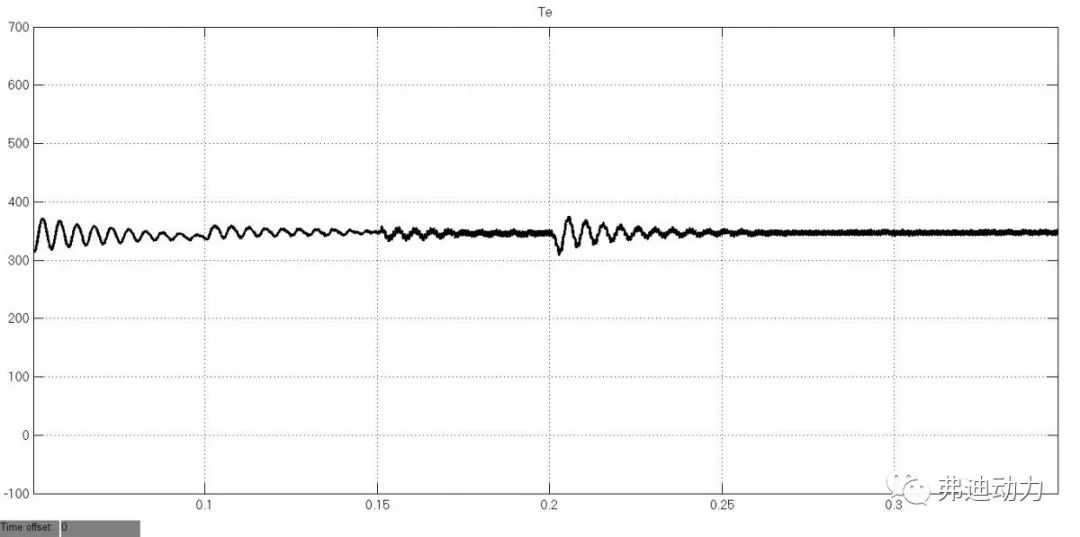
图9 电机输出电磁扭矩
(上篇完)
下篇内容:
基于硬件在环的控制算法调试&结论
参考文献
[1]. 吴斌(加). 大功率变频器及交流传动[M]. 2012.10
[2]. 宋文胜,冯晓云. 电力牵引交流传动控制与调制技术[M]. 2014.8
[3]. 周明磊. 电力机车牵引电机在全速度范围的控制策略研究[D]. 博士论文, 北京交通大学, 2013
[4]. 孙大南. 地铁车辆牵引电传动系统控制关键技术研究[D]. 博士论文, 北京交通大学,2012
[5]. 赵明花. 低地板轻轨车关键技术研究与装备集成[D]. 博士论文, 北京交通大学, 2013
[6]. 宋文胜. 电力牵引传动变流器控制与调制算法研究[D].博士论文, 西南交通大学,2011
[7]. 郭新华,王永兴,赵峰,温旭辉. 基于SHEPWM的中压大功率牵引永磁同步电机两电平控制[J],电工技术学报 2012.11,27(11):76~82.
[8]. 王琛琛,李瑞夫,周明磊. 基于TMS320F28335的SHEPWM数字实现[J],北京交通大学学报,2011.10,35(5):89~105.
[9]. Holtz J.Synchronous opfimal pulsewidth modulation and stator flux trajectory control for medium voltage drives [J]. IEEE.Trans.on lnd.2007,43(2):600-608.
[10]. Holtz J.Fast dynamic control of medium voltage drive Operating at very switching frequency—an overview [J]. IEEE. Trans. on Ind.Electronic.2008,55(3):1005-1013.


















 1151
1151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









