



 清华举行第十三届校内智能车竞赛,赛道仿照校园道路设置,挑战性强。参赛者需优化路径选择,确保行驶精确性和安全性。车模由组委会提供,采用IntelNUC控制板和小型直流电机驱动。
清华举行第十三届校内智能车竞赛,赛道仿照校园道路设置,挑战性强。参赛者需优化路径选择,确保行驶精确性和安全性。车模由组委会提供,采用IntelNUC控制板和小型直流电机驱动。

校内智能车比赛现场
昨天下午(2019/3/3)一群来自清华不同系别的同学齐聚创新实践中心大楼二楼大厅,参加在这里由工程物理系学生科协举办的 “Momenta杯”第十三届校内智能车竞赛的决赛。
一到比赛现场,首先就会被现场这巨大的清华校景沙盘所震撼。原来本次比赛的赛道就是仿照清华校园道路设置,主要的景点建筑物一应俱全,具有很强的视觉艺术冲击力。

仍在紧张调试中的参赛队员
当然,现场人员中还有一帮正在紧张备战的参赛队员。这个沙盘赛道对他们来讲具有很大的挑战性。
一是赛道上可以被识别的道路标识主要是其中离散分布的红点;二是赛道周围那花花绿绿的装饰景物造成的视觉干扰。最要命的就是这些狭窄的如同北京胡同的赛道了。每条道路都是单行道,而且都只能过勉勉强强通过一辆车模,赛场留给参赛选手进行辗转腾挪的空间有点少。

穿街走巷中的车模

胜利到达终点的车模

出师不利的车模
比赛的内容就是选手的车模在赛道中完成从从A点到B的运行。由于沙盘中具有很多交叉路口,并且各个路口的角度还有区别。
所以要求车模不仅需要精确的行走在车道上,而且根据路径的不同进行优化选择,使得运行时间和通过道路的安全性、可靠性得到保证。
不同视角下的比赛沙盘
比赛所使用的车模是由组委会统一配备,属于四轮独立驱动的车模底盘。每个车轮都是有带有减速齿轮箱的小型直流电机去动。控制比较方便,转弯比较灵活,适合在狭窄赛道上行进。
车体比较坚固,便于安装各类传感器。这个车模存在的最大缺点,就是没有配备电机转速传感器。这就是的车模运行的精确性大打折扣。车模运动比较容易收到地面摩擦力的变化、电池电压的波动而受到影响。很多队伍现场的故障都是由此引起的。
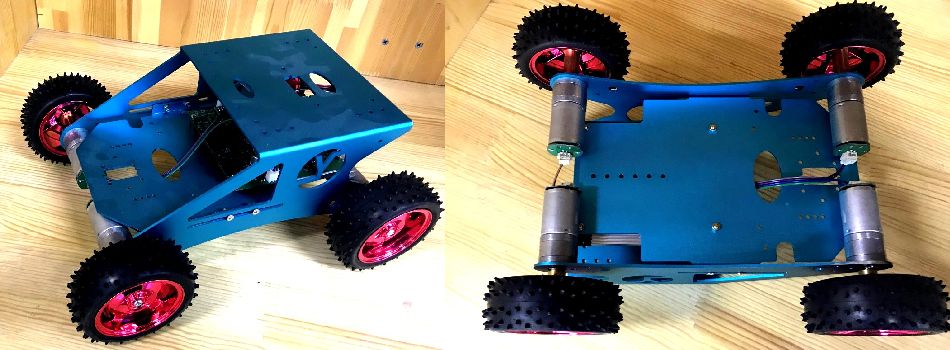
比赛用的车模底盘
车模控制部分主要是由上位机Intel NUC控制板,和底层有单片机组成的四路电机驱动板组成。这部分也是统一有竞赛组委会统一发放给参赛学生们的。
这样就便于低年级的同学能够很快将车模运行起来。

控制电路板
比赛使用的自动计时系统也是有学生科协自行制作。由于现场沙盘比较巨大,因此,安装了四个摄像头,分别采集沙盘四分之一的图像,然后经过视角校正和拼接,形成统一的沙盘图像。
使用图像处理跟踪车模在赛道上的位置,对于车模运行轨迹、时间进行判断。
比赛系统
参加这项比赛的队员大多来自一二年级的本科生。他们具有强烈的工程实践的兴趣和强的探索能力,对于这项具有挑战的车模竞赛内容,通过自己业余时间的主动学习,将相应的理论只是和实践工具和方法进行摸索,和自己的队友一起相互配合,完成车模作品的制作。

参赛队员介绍参赛体会
这次现场时智能车竞赛的现场决赛,总共有六支队伍进入最后的决赛。经过三轮,多个场次的角逐,最终分出了比赛的一二三等奖。
整个比赛过程中紧张激烈,参赛队员们也是群策群力,共同处理比赛过程中的出现的各种问题。
比赛举办方也穿插进行了有趣的抽奖活动,点燃了现场的气氛。

比赛后的合影
现场比赛之后,还有一个令我惊喜的事情,碰到了一位在2016年参加全国大学智能汽车比赛的队员,她叫徐本燕,来自武汉大学。现在她已经是清华大学机械工程系的直博生。
她也来到现场观看校内的比赛。她谈到,参加智能车竞赛的经历使她收获很多,激发了对相关学科的兴趣,也是进一步促进她来到清华继续攻读博士学位。

2016智能车比赛现场的徐本燕 | 校内现场合影
在这里,也祝愿所有参赛同学们能够在此过程中,培养起浓浓的对于工程学科的志趣,发现自己的潜质,找准自己的方向,为将来的成长奠定下良好的基础。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









