







 本文详细介绍了如何在Ubuntu16.04环境下安装librealsense2.0和pyrealsense2,包括更新系统、安装依赖库、构建内核模块等步骤,最后演示了如何使用安装好的库捕获深度相机D435的数据。
本文详细介绍了如何在Ubuntu16.04环境下安装librealsense2.0和pyrealsense2,包括更新系统、安装依赖库、构建内核模块等步骤,最后演示了如何使用安装好的库捕获深度相机D435的数据。
python intel深度相机D435 librealsense2.0的安装 和 pyrealsense2的安装
首先先说一下librealsense2的安装,我自己走了不少弯路,在这里我给大家分享下
首先我用的Ubuntu16.04,内核:4-4-140,python:项目需要python3.5.4
废话不多说,上教程:
1.git clone https://github.com/IntelRealSense/librealsense
2.cd librealsense
3.sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade 确定所有包最新状态
4.sudo update-grub && sudo reboot 这个时候会关机
在Grub2 Boot Menu - >“Ubuntu的高级选项”中断启动过程,并选择上一步中安装的内核版本。如果未显示“引导”菜单,请按住SHIFT键。完成启动,登录并验证支持的内核版本(4. [4,8,10,13,15,16] ])是否已就位uname -r
5.sudo apt-get install libusb-1.0-0-dev pkg-config
6.sudo apt-get install libglfw3-dev
7.mkdir build && cd build
8.cmake …
9.cmake …/ -DBUILD_EXAMPLES=true
10.make && sudo make install
接下来安装Video4Linux(Linux中关于视频设备的内核驱动) **安装前确保摄像头拔出 **
11.退出到librealsense文件夹下 cd …
12.sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d
13.sudo udevadm control --reload-rules && udevadm trigger
14.sudo apt-get install libssl-dev
15.这一步是最重要的!请根据自己的电脑配置选择:
为以下内容构建和应用修补的内核模块:
* Ubuntu 14/16/18与LTS内核 脚本将下载,修补和构建受realsense影响的内核模块(驱动程序)。
然后它将尝试插入修补模块而不是活动模块。如果失败,将恢复原始的uvc模块。
./scripts/patch-realsense-ubuntu-lts.sh
* Ubuntu与内核4.16
./scripts/patch-ubuntu-kernel-4.16.sh
* 采用Ubuntu的英特尔®Joule™ 基于Canonical Ltd.提供的定制内核
./scripts/patch-realsense-ubuntu-xenial-joule.sh
* 基于Arch的发行版
您需要安装base-devel软件包组。
您还需要安装匹配的linux-headers(即linux-lts-headers用于linux-lts内核)。
导航到脚本文件夹 cd ./scripts/
然后运行以下脚本来修补uvc模块:./patch-arch.sh
* Odroid XU4 with Ubuntu 16.04 4.14 image 基于Hardkernel提供的自定义内核
./scripts/patch-realsense-ubuntu-odroid.sh
我执行的是./scripts/patch-realsense-ubuntu-xenial-joule.sh
15.sudo dmesg | tail -n 50
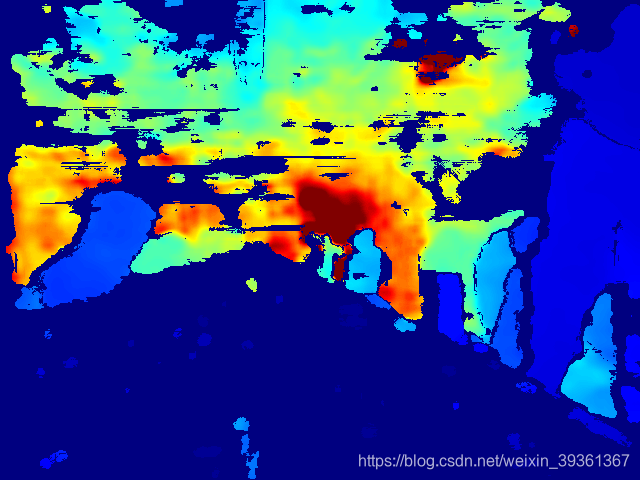
到这里安装完毕,插上相机开始你的表演
切换到这个文件夹中
/librealsense/build/examples/capture
运行./rs-capture
安装pyrealsense
git clone https://github.com/IntelRealSense/librealsense/tree/master/wrappers/python#installation
或者pip install pyrealsense2
在这里插入图片描述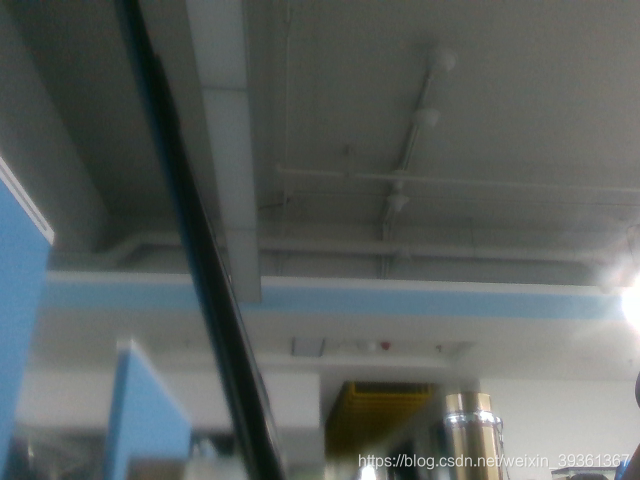


















 2118
2118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









