




 本文介绍了边缘检测的实质及Canny算法的具体实现步骤。首先将彩色图像转换为灰度图像,接着通过高斯滤波去除噪声,最后利用OpenCV中的Canny算法进行边缘检测。该文展示了使用Python和OpenCV库进行图像处理的具体代码。
本文介绍了边缘检测的实质及Canny算法的具体实现步骤。首先将彩色图像转换为灰度图像,接着通过高斯滤波去除噪声,最后利用OpenCV中的Canny算法进行边缘检测。该文展示了使用Python和OpenCV库进行图像处理的具体代码。
边缘检测的实质就是卷积运算
canny边缘检测步骤
1灰度处理
2高斯滤波 去除噪声
3调用opencv中canny算法边缘检测
import cv2
import numpy as np
import random
img = cv2.imread('image0.jpg',1)
imgInfo = img.shape
height = imgInfo[0]
width = imgInfo[1]
cv2.imshow('src',img)
#canny 1 gray 2 高斯 3 canny
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgG = cv2.GaussianBlur(gray,(3,3),0)# 高斯滤波
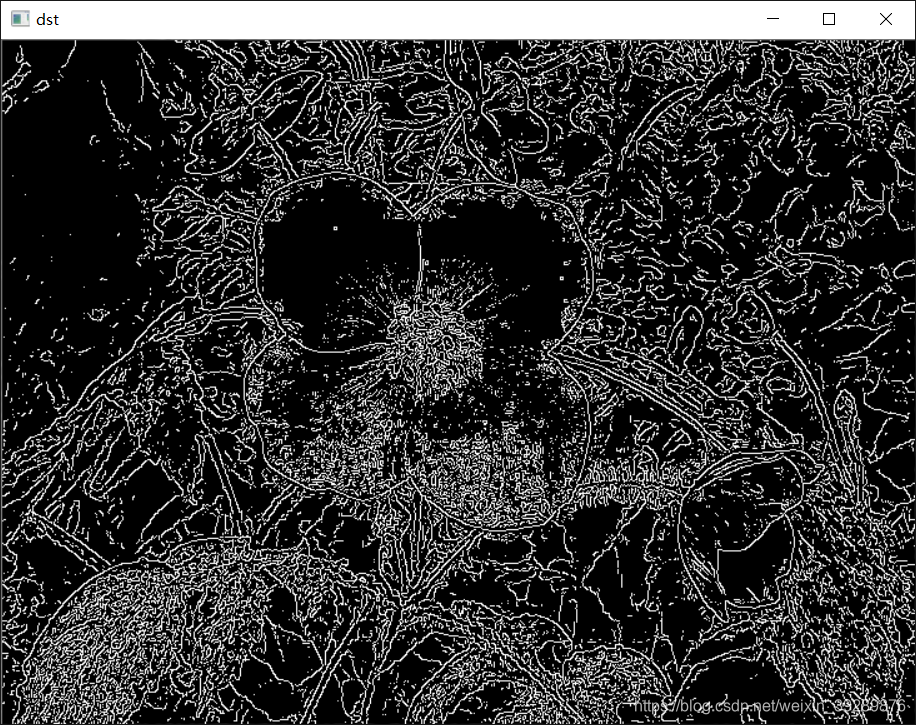
dst = cv2.Canny(img,50,50) #图片卷积——》th 门线,卷积之后大于运算后大于门线就是边缘点
cv2.imshow('dst',dst)
cv2.waitKey(0)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
将bgr转为灰度图

















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









