



参考:https://blog.youkuaiyun.com/qq_36242312/article/details/105742949
Eigen::Matrix4f get_model_matrix(float rotation_angle)
{
Eigen::Matrix4f model = Eigen::Matrix4f::Identity();
Eigen::Matrix4f rotate(4,4); // z-axis rotation
float radian = rotation_angle / 180.0 * MY_PI;
rotate << cos(radian), -sin(radian), 0, 0,
sin(radian), cos(radian), 0, 0,
0, 0, 1, 0,
0, 0, 0, 1;
model = rotate * model;
return model;
}
Eigen::Matrix4f get_model_matrix_axis(float rotation_angle, Eigen::Vector3f axis_start, Eigen::Vector3f axis_end)
{
// Eigen::Vector3f axis_start 为起点
// Eigen::Vector3f axis_end 为终点
Eigen::Matrix4f model = Eigen::Matrix4f::Identity();
// normalize axis
Eigen::Vector3f axis;
axis[0] = axis_end[0] - axis_start[0];
axis[1] = axis_end[1] - axis_start[1];
axis[2] = axis_end[2] - axis_start[2];
float norm = sqrt(axis[0] * axis[0] + axis[1] * axis[1] + axis[2] * axis[2]);
axis[0] /= norm;
axis[1] /= norm;
axis[2] /= norm;
// compute radian
float radian = rotation_angle / 180.0 * MY_PI;
// compute component 计算轴角旋转矩阵分量
Eigen::Matrix3f n(3, 3);
n << 0, -axis[2], axis[1],
axis[2], 0, -axis[0],
-axis[1], axis[0], 0;
Eigen::Matrix3f component1 = Eigen::Matrix3f::Identity() * cos(radian);
Eigen::Matrix3f component2 = axis * axis.transpose() * (1 - cos(radian));
Eigen::Matrix3f component3 = n * sin(radian);
Eigen::Matrix3f rotate_m = component1 + component2 + component3;
// Eigen 自带构造轴角旋转矩阵
// 下列注释用于验证我们构造的轴角旋转矩阵是否和Eigen的构造的轴角旋转矩阵一致
//Eigen::AngleAxisf rotation_vector(radian, Vector3f(axis[0], axis[1], axis[2]));
//Eigen::Matrix3f rotation_matrix;
//rotation_m = rotation_vector.toRotationMatrix();
Eigen::Matrix4f rotate_martix = Eigen::Matrix4f::Identity();
rotate_martix.block(0, 0, 3, 3) = rotate_m; // 前三个维度为旋转矩阵
model = rotate_martix * model;
return model;
}
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio,
float zNear, float zFar)
{
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();
Eigen::Matrix4f M_persp2ortho(4, 4);
Eigen::Matrix4f M_ortho_scale(4, 4);
Eigen::Matrix4f M_ortho_trans(4, 4);
//已更正
float angle = eye_fov * MY_PI / 180.0;
float height = zNear * tan(angle) * 2;
float width = height * aspect_ratio;
auto t = -zNear * tan(angle / 2); // 上截面
auto r = t * aspect_ratio; //右截面
auto l = -r; // 左截面
auto b = -t; // 下截面
// 透视矩阵"挤压"
M_persp2ortho << zNear, 0, 0, 0,
0, zNear, 0, 0,
0, 0, zNear + zFar, -zNear * zFar,
0, 0, 1, 0;
// 正交矩阵-缩放
M_ortho_scale << 2 / (r - l), 0, 0, 0,
0, 2 / (t - b), 0, 0,
0, 0, 2 / (zNear - zFar), 0,
0, 0, 0, 1;
// 正交矩阵-平移
M_ortho_trans << 1, 0, 0, -(r + l) / 2,
0, 1, 0, -(t + b) / 2,
0, 0, 1, -(zNear + zFar) / 2,
0, 0, 0, 1;
Eigen::Matrix4f M_ortho = M_ortho_scale * M_ortho_trans;
projection = M_ortho * M_persp2ortho * projection;
return projection;
}
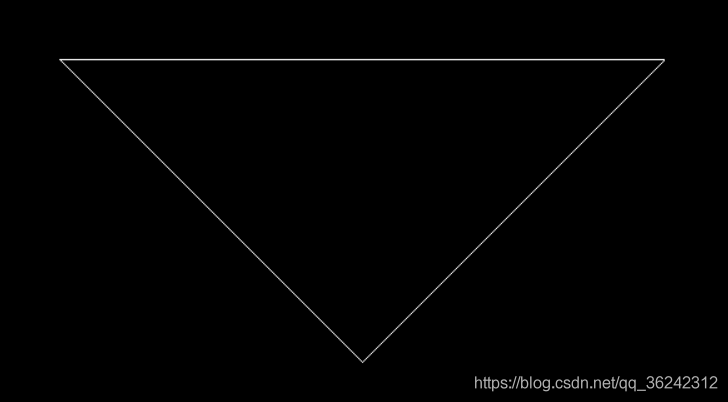
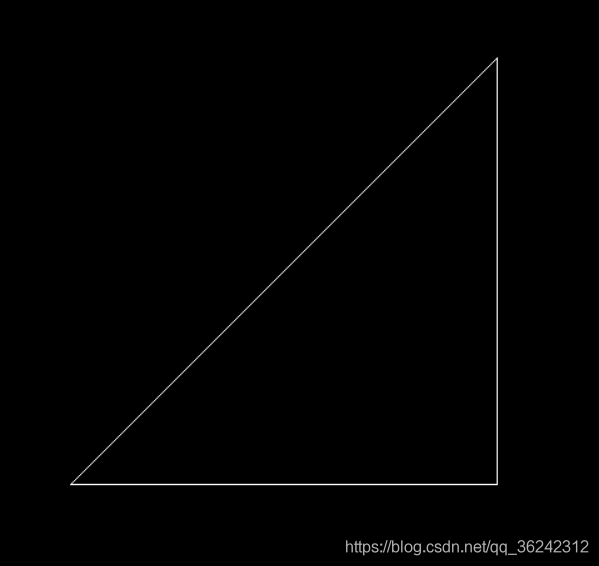
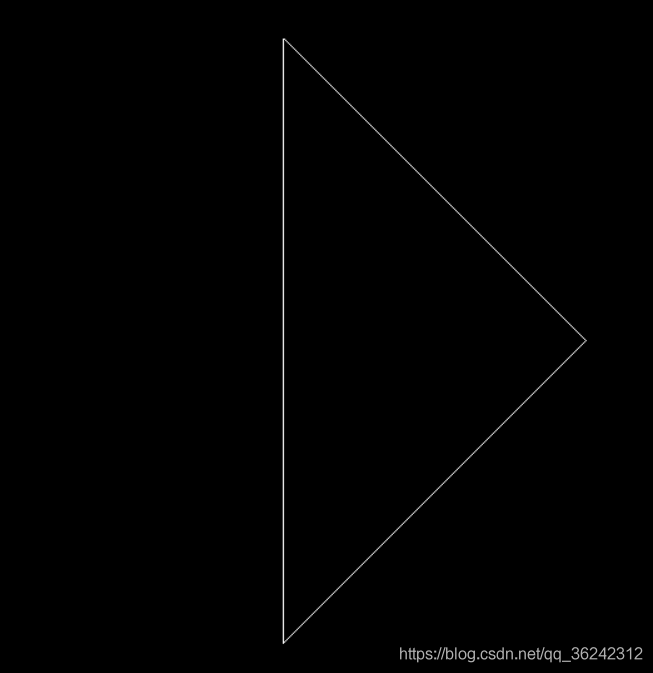
结果
以下依次是绕z轴旋转0/45/90度的结果:
绕任意轴旋转的结果可以通过调用get_model_matrix_axis函数实现。

















 1082
1082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









