



 本文介绍了两种迭代最近点算法实现——IterativeClosestPoint()与IterativeClosestPointNonLinear(),前者采用SVD进行变换估计,后者使用Levenberg-Marquardt算法。此外还展示了CorrespondenceEstimationBase类的相关图。
本文介绍了两种迭代最近点算法实现——IterativeClosestPoint()与IterativeClosestPointNonLinear(),前者采用SVD进行变换估计,后者使用Levenberg-Marquardt算法。此外还展示了CorrespondenceEstimationBase类的相关图。
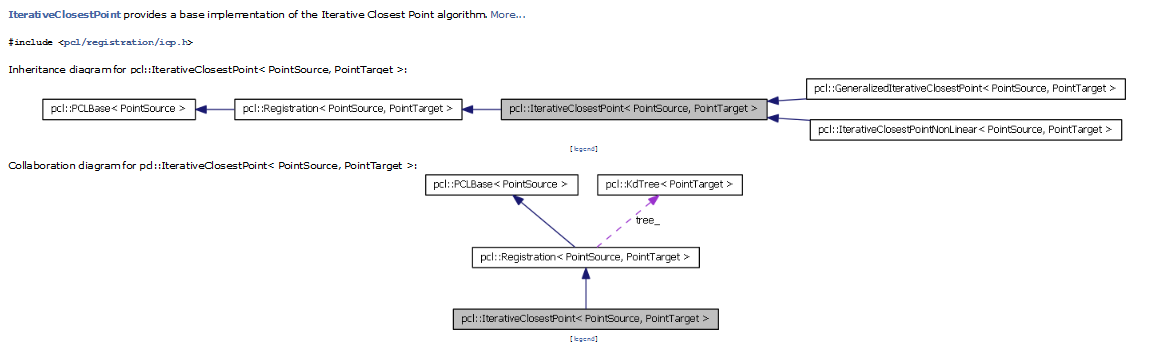
1 IterativeClosestPoint () 2 { 3 reg_name_ = "IterativeClosestPoint"; 4 ransac_iterations_ = 1000; 5 transformation_estimation_.reset (new pcl::registration::TransformationEstimationSVD<PointSource, PointTarget>); 6 };
1 IterativeClosestPointNonLinear () 2 { 3 min_number_correspondences_ = 4; 4 reg_name_ = "IterativeClosestPointNonLinear"; 5 6 transformation_estimation_.reset (new pcl::registration::TransformationEstimationLM<PointSource, PointTarget>); 7 }

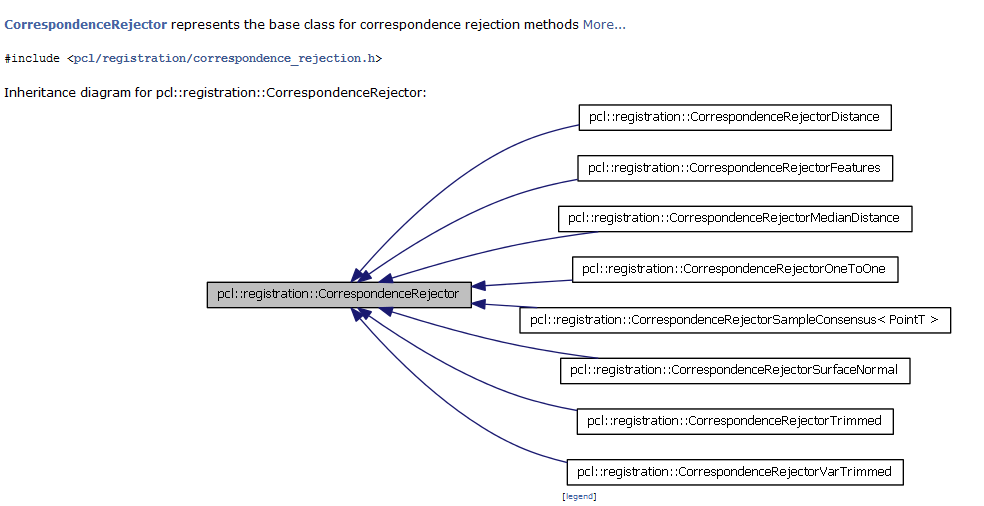
CorrespondenceEstimationBase相关类图:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









