






需再看
https://classroom.udacity.com/courses/cs373/lessons/48684821/concepts/487362110923
https://classroom.udacity.com/courses/cs373/lessons/48704330/concepts/487480820923
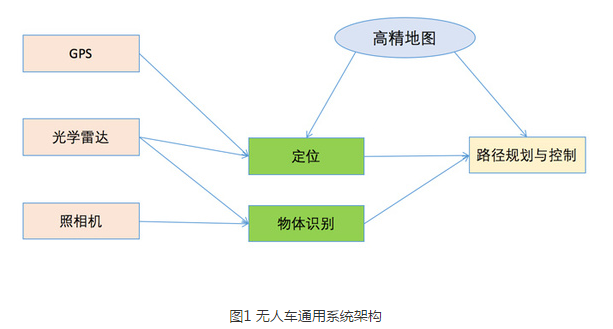
传感器进行信息采集->感知阶段(主要是定位和物体识别),对各种传感器信息进行融合,得出精准位置信息->计划和控制阶段(路径规划)根据位置信息和识别出的图像信息实时调整行车计划,并把行车计划转化成控制信号操控车辆。
kalman filter(其实是一个最佳估值)
更通俗的讲解见http://www.zhihu.com/topic/20016366/top-answers
particle filters(粒子滤波器)
measurements: the measurement sets the weighting factor
参考资料:
http://mt.sohu.com/20160504/n447626695.shtml


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









