






 本文详细介绍了如何修改U-Boot源码以支持Nor和Nand Flash,包括配置宏定义、添加Nor Flash型号、调整扇区数量限制及Nand Flash控制器初始化等步骤。
本文详细介绍了如何修改U-Boot源码以支持Nor和Nand Flash,包括配置宏定义、添加Nor Flash型号、调整扇区数量限制及Nand Flash控制器初始化等步骤。
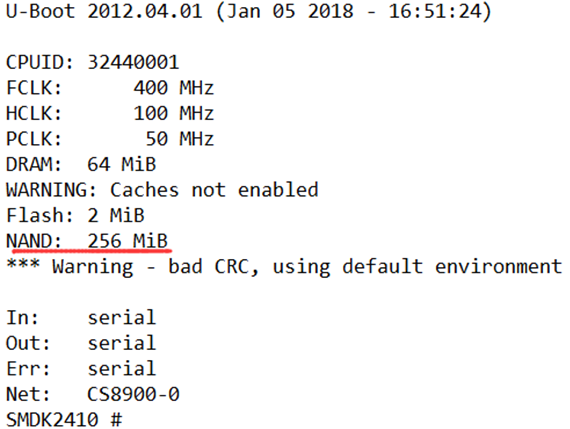
- 在上一章,我们添加了nor,nand启动后,uboot启动出如下图所示:
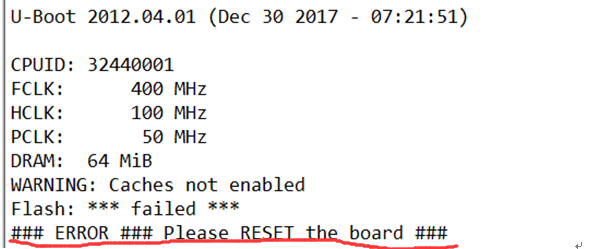
上面的Flash: *** failed *** 是属于uboot第二阶段函数board_init_r()里的代码, 代码如下所示(位于arch/arm/lib/board.c):
/*第二阶段*/ void board_init_r(gd_t *id, ulong dest_addr) //gd uboot重定位地址 { ... ... puts("Flash: "); //打印flash: flash_size = flash_init(); //初始化nor_flash if (flash_size > 0) { ... ... print_size(flash_size, "\n"); //打印nor_flash的大小 } else { puts(failed); //打印数组failed[]="*** failed ***\n"; hang(); //进入while中,并打印: ### ERROR ### Please RESET the board ### } #if defined(CONFIG_CMD_NAND) puts("NAND: "); //打印NAND: nand_init(); //初始化nand_flah ... ... }
从上面代码看出, board_init_r()会来初始化nor,由于新的uboot不支持nor,所以flash_init()初始失败,然后打印一串错误代码后,等待复位.
由于2440在nand启动时,会自动装载nand的前4k内容,所以不支持norflash,因为nor的前4k内容被nand占用.
所以修改上面代码,避免nand启动一直卡住,将:
else { puts(failed); //打印数组failed[]="*** failed ***\n"; hang(); //进入while中,并打印: ### ERROR ### Please RESET the board ### }
改为:
else { puts("0 KB\r\n"); //打印0 KB }
1.接下来,下章便来修改代码,使uboot支持读写norflash
1.1首先在include/common.h中添加:
#define DEBUG //调试模式
然后使用nor启动新的uboot,打印出调试信息:
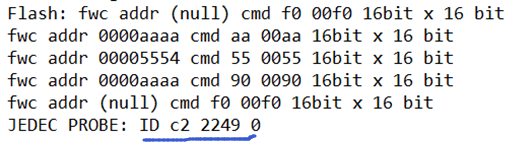
打印出norflash的厂家ID=0xC2,设备ID=0x2249,显然uboot匹配读出的ID没有成功.
搜索JEDEC PROBE字段,找到位于board_init_r()->flash_init()->flash_detect_legacy():

如上图所示,该函数会进入board_init_r()->flash_init()->flash_detect_legacy()->jedec_flash_match(),里面会通过两个ID来匹配jedec_table[].
1.2接下来向jedec_table[]里添加norflash:MT29LV160DB(位于drivers/mtd/jedec_flash.c)
代码如下:
/*MX29LV160DB*/ { .mfr_id = (u16)MX_MANUFACT, //厂家ID0x00C200C2 (读nor,便是0xc2) .dev_id = 0x2249, //设备ID .name = "MXIC MX29LV160DB", .uaddr = { [1] = MTD_UADDR_0x0555_0x02AA /* 数组[1]表示是16位nor,解锁地址为:0x555,0x2AA */ }, .DevSize = SIZE_2MiB, .CmdSet = P_ID_AMD_STD, .NumEraseRegions= 4, //4种不同的扇区规格 .regions = { ERASEINFO(16*1024, 1), ERASEINFO(8*1024, 2), ERASEINFO(32*1024, 1), ERASEINFO(64*1024, 31), } },
重新烧写看打印信息,出现这么一段ERROR:
ERROR:too many flash sectors
说flash的扇区太多了,搜索找到位于drivers/mtd/jedec_flash.c中:

显然是CONFIG_SYS_MAX_FLASH_SECT宏小于我们flash的扇区,所以打印ERROR。
所以修改CONFIG_SYS_MAX_FLASH_SECT宏定义(位于include/configs/smdk2440.h),并去掉之前定义的DEBUG调试宏(位于include/common.h)
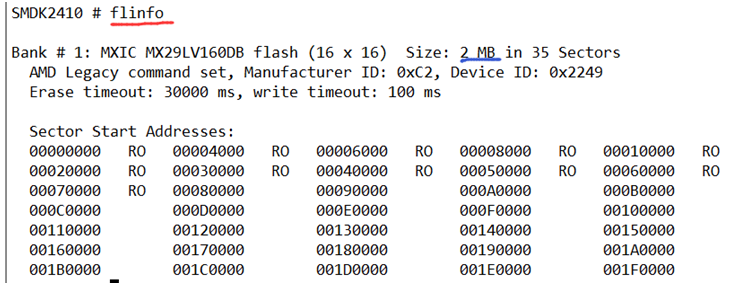
1.3然后重新烧写
输入flinfo命令(flash info),就能查看flash的信息了:
然后通过uboot命令,检测nor的读写是否正确:
protect off all erase 80000 +7ffff cp.b 30000000 80000 1000 //烧写在另一个位置 cmp.b 30000000 80000 1000 //比较,是否读写正确
2.接下来继续修改代码,使uboot支持NandFlash
2410的NandFlash位于drivers/mtd/nand/s3c2410_nand.c
2.1 首先复制s3c2410_nand.c,改为s3c2440_nand.c
改Makefile,如下图所示:

2.2 在上一章分析过CONFIG_NAND_S3C2410宏,位于include/configs/smdk2440.h:
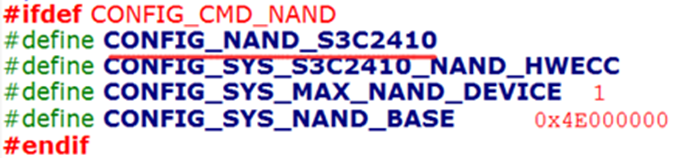
如上图所示,其中CONFIG_CMD_NAND宏:表示uboot是否支持nand,在上章里,我们把它屏蔽了,接下来便取消屏蔽CONFIG_CMD_NAND宏。
2.3继续添加对CONFIG_NAND_S3C2440宏的支持,将:
#ifdef CONFIG_CMD_NAND #define CONFIG_NAND_S3C2410 #define CONFIG_SYS_S3C2410_NAND_HWECC #define CONFIG_SYS_MAX_NAND_DEVICE 1 #define CONFIG_SYS_NAND_BASE 0x4E000000 #endif
改为:
#ifdef CONFIG_CMD_NAND #ifdef CONFIG_S3C2410 #define CONFIG_NAND_S3C2410 #define CONFIG_SYS_S3C2410_NAND_HWECC #else // CONFIG_S3C2440 #define CONFIG_NAND_S3C2440 #define CONFIG_SYS_S3C2440_NAND_HWECC #endif #define CONFIG_SYS_MAX_NAND_DEVICE 1 #define CONFIG_SYS_NAND_BASE 0x4E000000 #endif
由于smdk2410.h中定义的是CONFIG_S3C2410,而smdk2440.h中定义的是CONFIG_S3C2440,所以便会根据上面的#ifdef来动态定义宏
2.4 然后来看看nand的流程(和linux的nand驱动有很多相似的地方):
1)uboot重定位后进入第二阶段board_init_r():
void board_init_r(gd_t *id, ulong dest_addr) //gd uboot重定位地址 { ... ... #if defined(CONFIG_CMD_NAND) //需要定义CONFIG_CMD_NAND宏 puts("NAND: "); nand_init(); /* go init the NAND */ #endif ... ... }
2)进入nand_init():
void nand_init(void) { ... ... for (i = 0; i < CONFIG_SYS_MAX_NAND_DEVICE; i++) //在2.3小节里,该宏为1 nand_init_chip(i); printf("%lu MiB\n", total_nand_size / 1024); ... ... }
3)进入nand_init()->nand_init_chip(0):
static void nand_init_chip(int i) { struct mtd_info *mtd = &nand_info[i]; //mtd_info属于软件的一部分,实现用户层读写等操作 struct nand_chip *nand = &nand_chip[i]; //属于底层,保存对nand的硬件相关操作,它是mtd_info结构体的priv私有成员 ulong base_addr = base_address[i]; //获取nand寄存器基地址,等于0x4E000000 int maxchips = CONFIG_SYS_NAND_MAX_CHIPS; if (maxchips < 1) maxchips = 1; mtd->priv = nand; //设置私有成员nand_chip ... ... if (board_nand_init(nand)) //位于s3c2440_nand.c,该函数会设置nand_chip结构体的成员 return; if (nand_scan(mtd, maxchips)) //通过mtd->priv来开启nand片选,来获取nand的型号,类型等.并填充mtd结构体下其它的成员. return; nand_register(i); //注册nand,使uboot支持对nand的读写操作 }
这个nand_chip结构体和我们之前学的linux下的nand驱动章节里的nand_chip一摸一样,流程也非常相似.
由于在2.1小节里,该函数所在的文件s3c2440_nand.c是从s3c2410_nand.c复制过来的,所以接下来便修改s3c2440_nand.c (位于drivers/mtd/nand目录下)
2.5 修改s3c2440_nand.c(参考2410数据手册和2440数据手册)
1)首先将所有带2410字的变量都替换为2440
2)修改board_nand_init()
参考以前写的nand驱动,将
tacls = 4; twrph0 = 8; twrph1 = 8; cfg = S3C2440_NFCONF_EN; //启动nand控制器 cfg |= S3C2440_NFCONF_TACLS(tacls - 1); cfg |= S3C2440_NFCONF_TWRPH0(twrph0 - 1); cfg |= S3C2440_NFCONF_TWRPH1(twrph1 - 1); writel(cfg, &nand_reg->nfconf);
改为:
tacls = 0; //10ns twrph0 = 1; //20ns twrph1 = 0; //10ns nand_reg->nfconf = (tacls<<12) | (twrph0<<8) | (twrph1<<4); //设置时序 nand_reg->nfcont=(1<<1)|(1<<0); // bit1:关闭片选(), bit0:开启nand flash 控制器
2)添加nand_chip结构体成员
nand->select_chip=s3c2440_select_chip; //设置CE
然后并写一个s3c2440_select_chip()函数
/*nand flash :CE */ static void s3c2440_select_chip(struct mtd_info *mtd, int chipnr) { if(chipnr==-1) //CE Disable { my_regs->nfcont|=(0x01<<1); //bit1置1 } else //CE Enable { my_regs->nfcont&=~(0x01<<1); //bit1置0 } }
3)屏蔽带硬件ECC的相关操作
将:
#ifdef CONFIG_S3C2410_NAND_HWECC nand->ecc.hwctl = s3c2440_nand_enable_hwecc; nand->ecc.calculate = s3c2440_nand_calculate_ecc; nand->ecc.correct = s3c2440_nand_correct_data; nand->ecc.mode = NAND_ECC_HW; nand->ecc.size = CONFIG_SYS_NAND_ECCSIZE; nand->ecc.bytes = CONFIG_SYS_NAND_ECCBYTES; #else nand->ecc.mode = NAND_ECC_SOFT; #endif
改为:
nand->ecc.mode = NAND_ECC_SOFT; //使用软件ECC
2.6 修改s3c2440_hwcontrol()函数
改为:
static void s3c2440_hwcontrol(struct mtd_info *mtd,int cmd,unsigned int ctrl) { struct nand_chip *chip = mtd->priv; struct s3c2440_nand *nand = s3c2440_get_base_nand(); //获取nand寄存器地址 if (ctrl & NAND_CLE) // 传输的是命令 nand->nfcmd=cmd; else // 传输的是地址 nand->nfaddr=cmd; }
s3c2440_hwcontrol()函数的ctrl是个标志位:
- bit[1]==1: 表示要发送的dat是命令
- bit[2]==1: 表示要发送的dat是地址
- bit[0]==1:表示使能nand , ==0:表示禁止nand
(PS:具体可以参考内核的nand_command_lp()函数,它会调用这个cmd_crtl函数来实现功能 )
2.7编译烧写
如下图所示,可以看到已支持Nand Flash:
试验nand是否能读写:
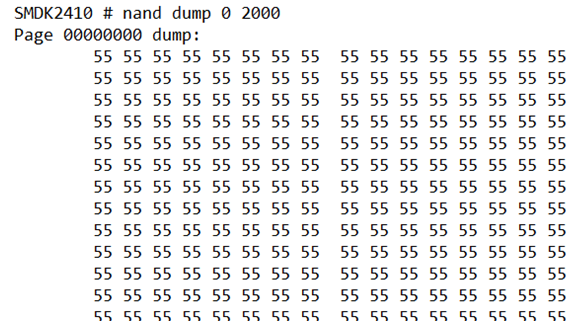
nand erase 0 2000 //擦除 mw.b 30000000 0x55 2000 nand write 30000000 0 2000 //将0x55写入nand nand dump 0 2000 //打印
如下图所示, 可以看到读写nand都没问题
下章便来学习:让uboot支持DM9000网卡,便可以通过网络来传输文件


















 645
645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









