






此作业要求参见:https://edu.cnblogs.com/campus/nenu/2018fall/homework/2198
1、本周PSP
| 类型 | 任务 | 开始时间 | 结束时间 | 中断时间 | Delta时间 |
| 立会 | 讨论选题 | 10.10 15:03 | 10.10 15:26 | 0min | 23min |
| 立会 | 讨论项目功能模块地划分;讨论视频拍摄的内容以及时间地点 | 10.11 14:40 | 10.11 15:13 | 0min | 33min |
| 立会 | 讨论视频拍摄的内容以及时间地点 | 10.12 11:33 | 10.12 12:16 | 0min | 43min |
| 文档 | 与组内成员共同探讨(线上探讨)并编写拍摄脚本 | 10.12 20:21 | 10.12 21:53 | 0min | 92min |
| 调查 | 市场调查NABCD需求分析 | 10.12 13:24 | 10.12 14:50 | 22min | 64min |
| 立会 | 完善脚本;确定选角 | 10.13 10:11 | 10.13 10:47 | 0min | 36min |
| 视频 | 与组内成员共同拍摄视频 | 10.13 10:51 | 10.13 12:47 | 0min | 116min |
| 视频 | 与组内成员共同剪辑视频 | 10.13 15:27 | 10.13 17:02 | 4min+2min+7min | 82min |
| 视频 | 与组内成员共同剪辑视频 | 10.13 19:16 | 10.13 20:31 | 3min | 75min |
| 立会 | 回看已剪辑的视频片段,讨论如何丰富视频内容 | 10.14 12:07 | 10.14 12:48 | 0min | 41min |
| 博客 | 写博客 《【杨老师粉丝群】第一周立会报告第五次》 | 10.14 13:24 | 10.14 13:44 | 2min | 18min |
| 视频 | 与组内成员共同剪辑视频 | 10.14 15:35 | 10.14 20:37 | 2min+5min+36min+2min+17min+4min | 236min |
| 立会 | 检查视频;讨论产品功能地实现 | 10.15 12:01 | 10.15 12:34 | 0min | 33min |
总计时间:892min
2、本周进度条
| 代码行数 | 博文字数 | 用到的软件工程知识点 |
| 0 | 1912 | PSP |
3、累积进度图
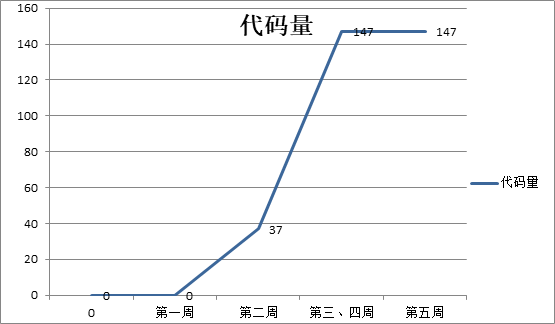
(1)累积代码折线图
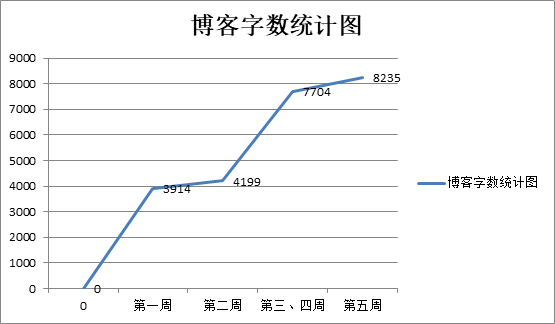
(2)累计博文折线图
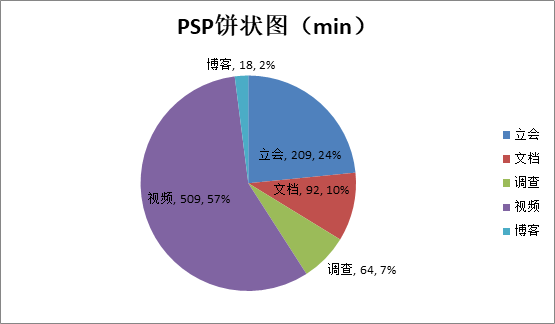
4、PSP饼状图

















 146
146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









