






 博客围绕多个程序题展开,包括判断方阵元素是否沿主对角线对称、整数排序、找鞍点等。介绍了各题的实验代码、设计思路,分享了遇到的问题及解决方式,还提及学习进度条和学习感悟,如学习了二维数组求最大值和鞍点等知识。
博客围绕多个程序题展开,包括判断方阵元素是否沿主对角线对称、整数排序、找鞍点等。介绍了各题的实验代码、设计思路,分享了遇到的问题及解决方式,还提及学习进度条和学习感悟,如学习了二维数组求最大值和鞍点等知识。
程序填空题:
5-1
输入一个正整数 n (1≤n≤10)和n 阶方阵a的元素,如果方阵a中的所有元素都沿主对角线对称,输出“Yes”, 否则,输出“No”。主对角线为从矩阵的左上角至右下角的连线,方阵a中的所有元素都沿主对角线对称指对所有i, k,a[i][k]和a[k][i]相等。输入输出示例如下:
输入:
3
1 2 3
4 5 6
7 8 9输出:
No1.实验代码:
#include <stdio.h>
int main(void)
{
int found, i, k, n;
int a[10][10];
scanf ("%d", &n);
for (i = 0; i < n; i++)
for (k = 0; k < n; k++)
scanf("%d", &a[i][k]);
found = 1;
for (i = 0; i < n; i++){
for (k = 0; k < i; k++){
if (
a[i][k]!=a[k][i]
(3分)) {
found = 0
;
break;
}
}
if (
found == 0
){
break;
}
}
if (found != 0){
printf("Yes\n");
}
else{
printf("No\n");
}
return 0;
}2.设计思路:
流程图: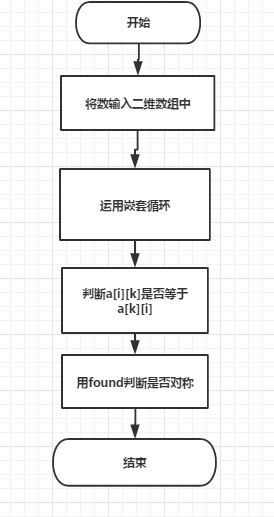
思路:
就是判断a[i][k]和a[k][i]是否相等,found不等于0时 打印yes
3.本题遇到的问题及解决方案
没有遇到问题
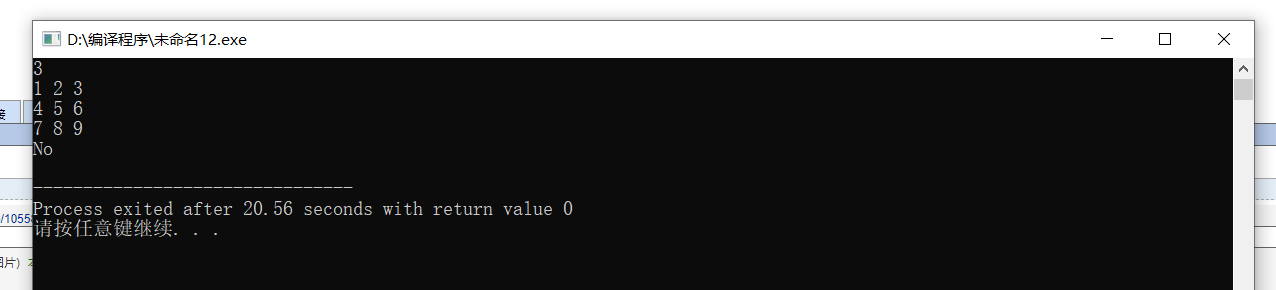
4.实验结果截图:
基础编程题:
7-2 选择法排序 (20 分)
本题要求将给定的n个整数从大到小排序后输出。
输入格式:
输入第一行给出一个不超过10的正整数n。第二行给出n个整数,其间以空格分隔。
输出格式:
在一行中输出从大到小有序的数列,相邻数字间有一个空格,行末不得有多余空格。
输入样例:
4
5 1 7 6输出样例:
7 6 5 11.实验代码:
#include<stdio.h>
int main(void)
{
int n,i,index,k;
int num[10];
scanf("%d\n",&n);
for(i=0;i<n;i++){ //将输入的数存入数组
scanf("%d",&num[i]);
}
for(k=0;k<n-1;k++){ //循环n-1次
for(i=k+1;i<n;i++){ //寻找最小下标所在
if(num[i]>num[k] ){
index = num[i]; //最小元素与下标为k的元素交换
num[i] = num[k];
num[k] = index;
}
}
}
for(i=0;i<n;i++){
printf("%d",num[i]);
if(i!=(n-1)) //题目要求行末不得有多余空格
printf(" ");
}
return 0;
}2.实验设计思路:
流程图: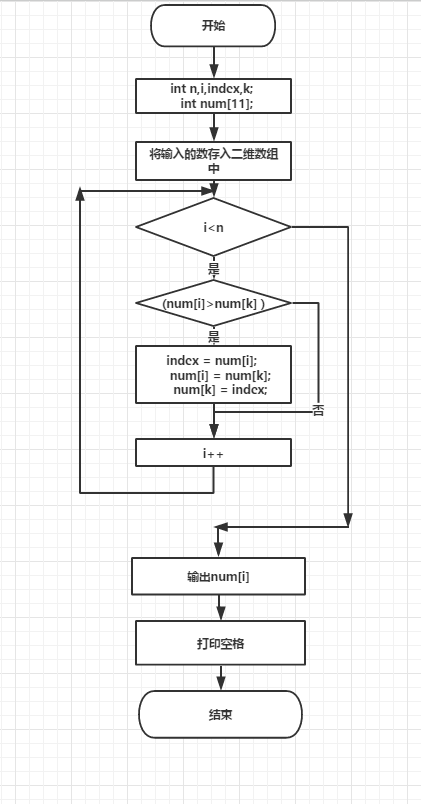
思路:
先将输入的数存入数组 ,再用for循环循环n-1次 ,
然后寻找最小下标所在 , 最小元素与下标为k的元素交换
题目要求行末不得有多余空格
要注意间隔方式
3.本题遇到的问题及解决方式
问题:我开始没有注意题目要求行末不得有多余空格
解决方式:改为 if(i!=(n-1)) printf(" ");
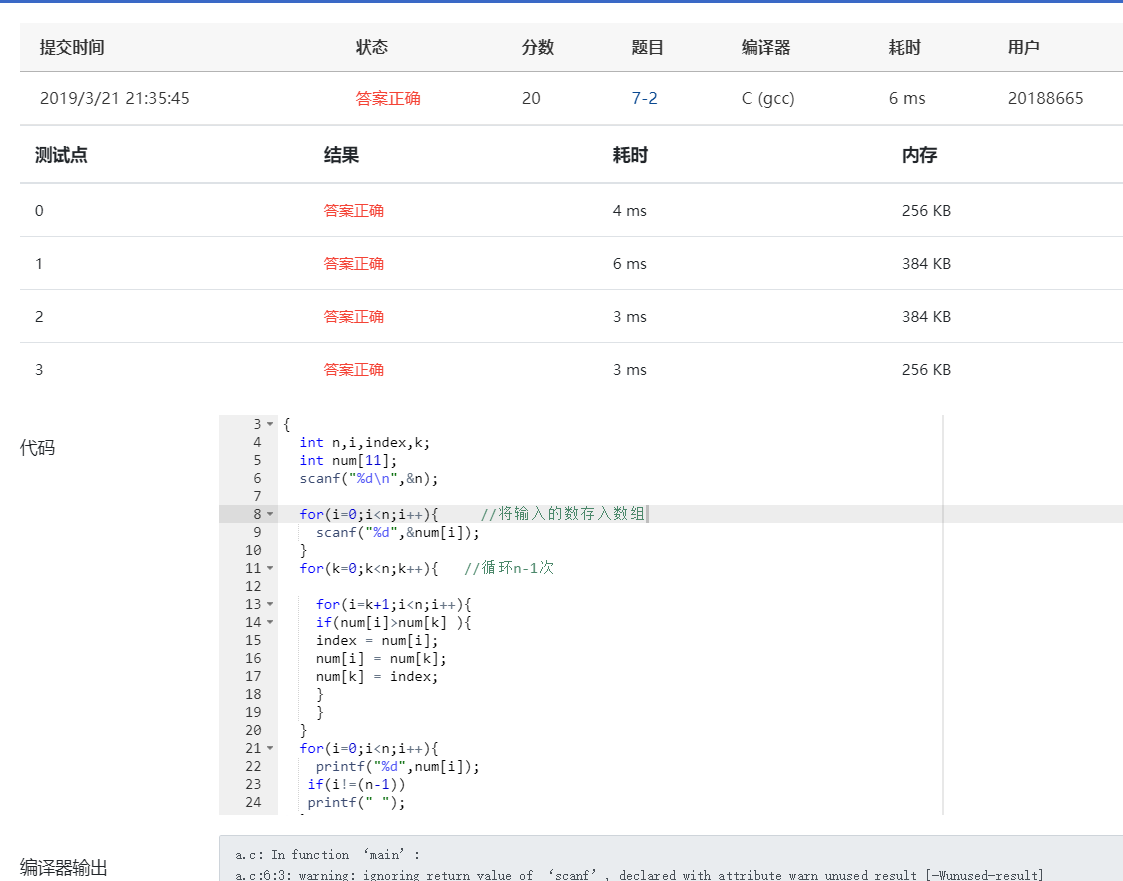
问题二:我提交的时候遇到了scanf的警告
解决方式:我百度了一下,意思是说我没有用到scanf的返回值
后来改了几个空格 和加了个\n 就运行正确了
4.运行结果截图:
7-1 找鞍点 (20 分)
一个矩阵元素的“鞍点”是指该位置上的元素值在该行上最大、在该列上最小。
本题要求编写程序,求一个给定的n阶方阵的鞍点。
输入格式:
输入第一行给出一个正整数n(1≤n≤6)。随后n行,每行给出n个整数,其间以空格分隔。
输出格式:
输出在一行中按照“行下标 列下标”(下标从0开始)的格式输出鞍点的位置。如果鞍点不存在,则输出“NONE”。题目保证给出的矩阵至多存在一个鞍点。
输入样例1:
4
1 7 4 1
4 8 3 6
1 6 1 2
0 7 8 9输出样例1:
2 1输入样例2:
2
1 7
4 1输出样例2:
NONE1.实验代码:
#include<stdio.h>
int main ()
{
int n,i,j,max=0,count=0,k,flag=1,index;//index为下标,max为该行最大值
int num[6][6]; //flag记录在该列是否为最小值 count为鞍点
scanf ("%d\n",&n);
for (i=0;i<n;i++){
for (j=0;j<n;j++){
scanf ("%d",&num[i][j]); //将数输入二维数组
}
}
for (i=0;i<n;i++){
max=num[i][0];
index=0;
for (j=1;j<n;j++){
if(num[i][j]>=max){ //找到该行的最大值 考虑数相等的情况
max=num[i][j];
index=j; //记录列的下标
}
}
for(k=0;k<n;k++){ //判断该数在此列是否为最小值
if(max>num[k][index]){
flag=0;
}
}
if(flag==1){
count++;
printf ("%d %d",i,index);
}
flag+=1;
}
if(count==0)
printf ("NONE");
return 0;
}2.实验设计思路:
流程图: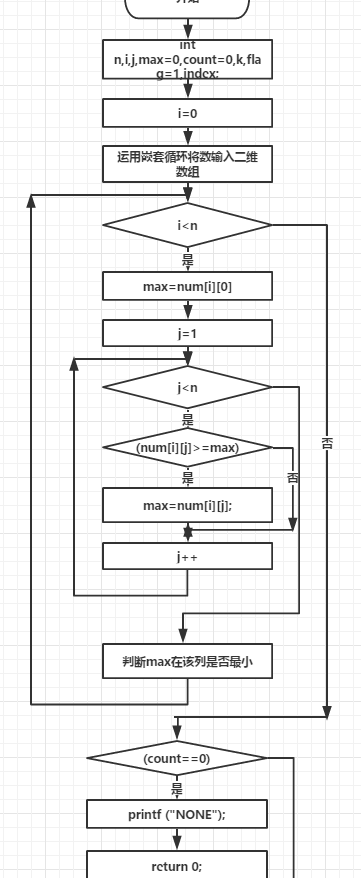
思路:
先将数输入二维数组,再用for循环找到该行的最大值 要考虑数相等的情况;
用index记录列的下标 判断该数在此列是否为最小值 然后下标或NONE
要注意的地方:
3.本题遇到的问题及解决方式:
错误截图: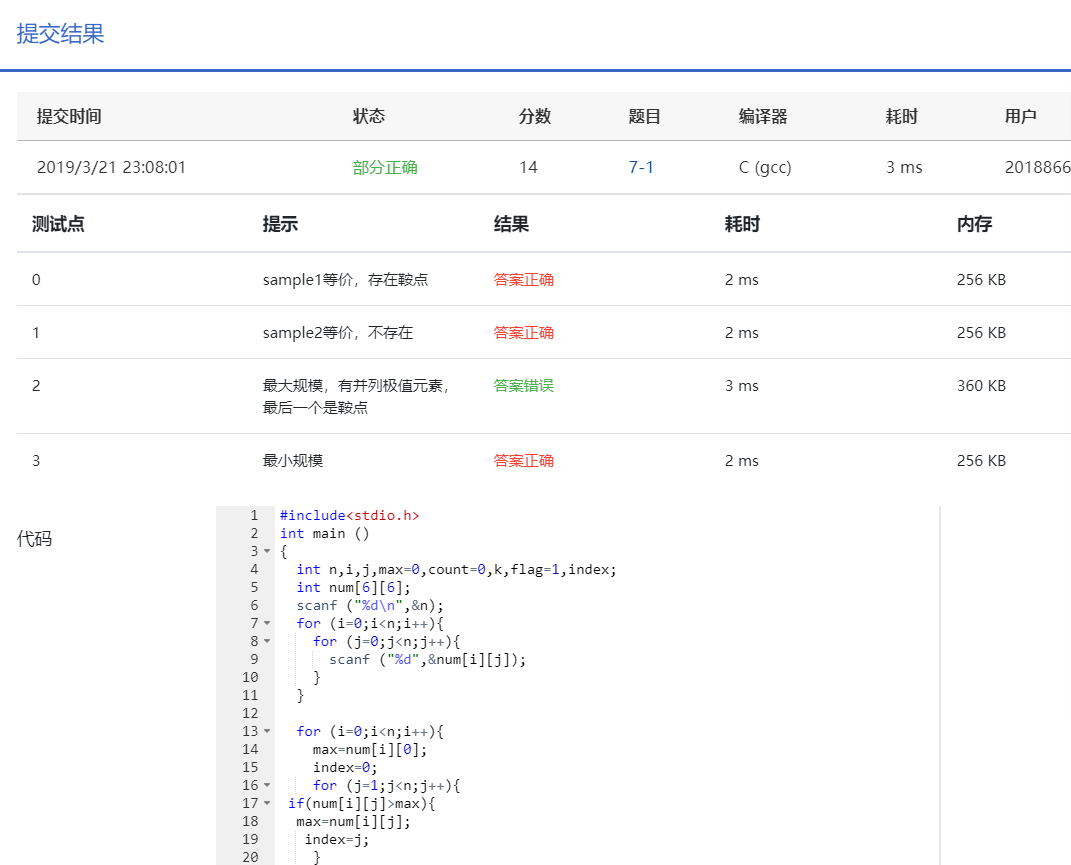
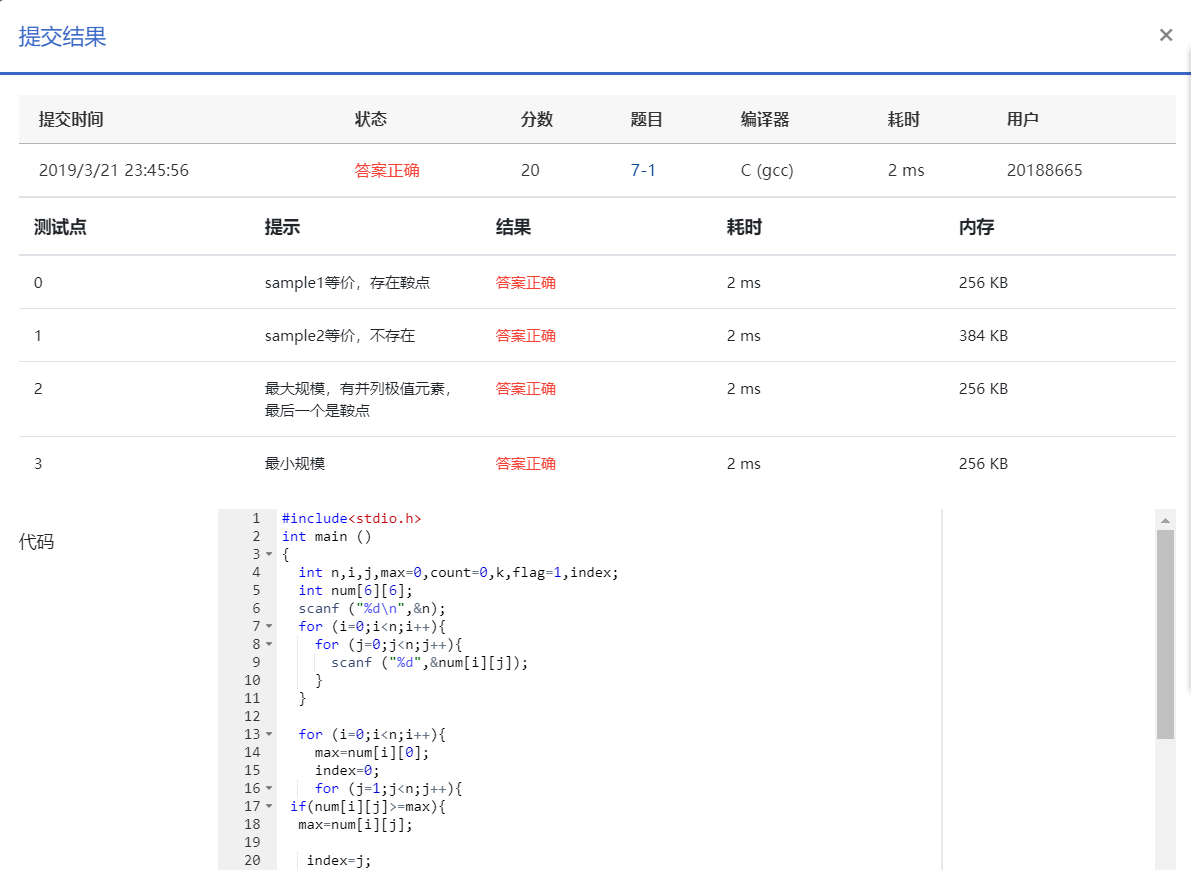
解决方式:改为 if(num[i][j]>=max)
4.运行结果截图:
7-1 冒泡法排序 (10 分)
输入1个正整数n(1<=n<=10),然后输入n个整数并存放在数组中,将这n个整数从大到小排序后输出,相邻数字间有一个空格,行末不得有多余空格。
输入格式:
输入第一行给出一个不超过10的正整数n。第二行给出n个整数,其间以空格分隔。
输出格式:
在一行中输出从大到小有序的数列,相邻数字间有一个空格,行末不得有多余空格。
输入样例:
4
75 71 77 76输出样例:
77 76 75 711.实验代码:
#include<stdio.h>
int main(void)
{
int n,i,index,k;
int num[10];
scanf("%d\n",&n);
for(i=0;i<n;i++){ //将输入的数存入数组
scanf("%d",&num[i]);
}
for(k=0;k<n-1;k++){ //循环n-1次
for(i=k+1;i<n;i++){ //寻找最小下标所在
if(num[i]>num[k] ){
index = num[i]; //最小元素与下标为k的元素交换
num[i] = num[k];
num[k] = index;
}
}
}
for(i=0;i<n;i++){
printf("%d",num[i]);
if(i!=(n-1)) //题目要求行末不得有多余空格
printf(" ");
}
return 0;
}2.实验设计思路:
流程图: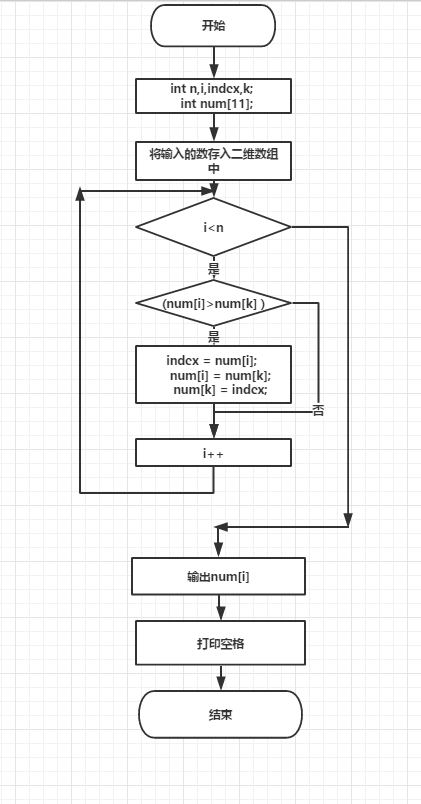
思路:
先将输入的数存入数组 ,再用for循环循环n-1次 ,
然后寻找最小下标所在 , 最小元素与下标为k的元素交换
题目要求行末不得有多余空格
要注意间隔方式
3.本题遇到的问题及解决方式:
我这个题目没有用冒泡法做 是照着第一题写的
4.运行结果截图:

二、学习进度条
| 周/日期 | 这周所花的时间 | 代码行 | 学到的知识点简介 | 目前比较迷惑的题目 |
|---|---|---|---|---|
| 3/4-3/9 | 6小时 | 89 | 新建文件进行读写 | 二位数组子数组的最大值的求和 |
| 3/10-3/15 | 8小时 | 156 | 二维数组的运用 | 二位数组子数组的最大值的求和 |
| 3/16-3/22 | 10小时 | 120 | 用二维数组求最大值和鞍点 | 冒泡法排序 |
三、学习感悟
学了二维数组的使用来求最大值以及求鞍点 学了如何判断矩阵

















 2662
2662

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









