






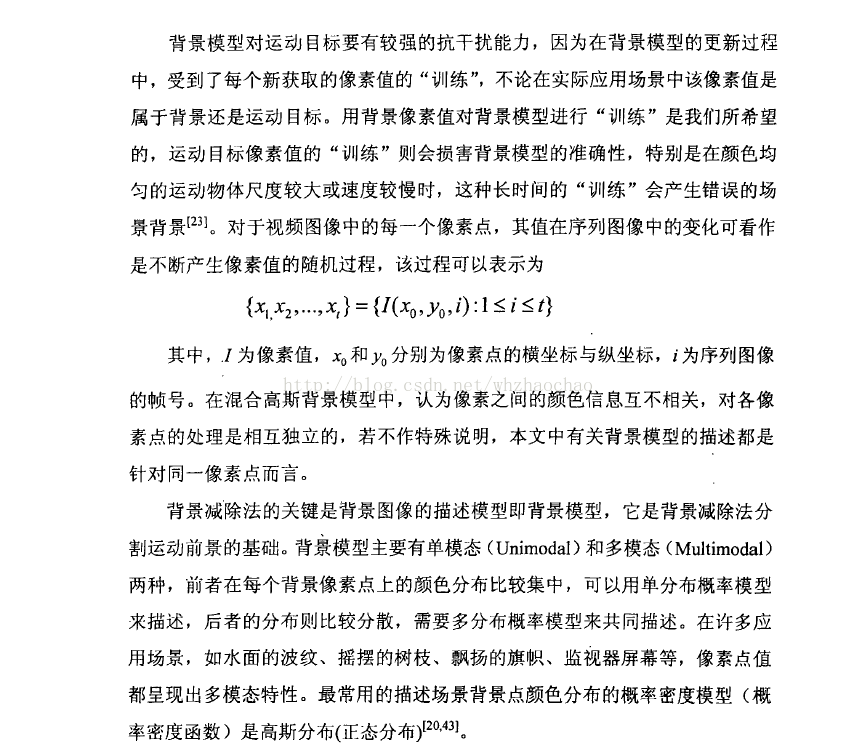
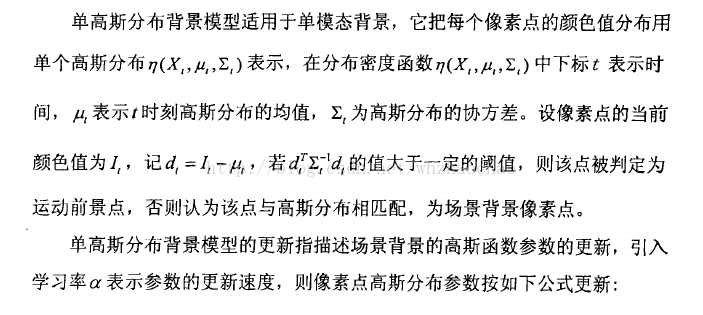
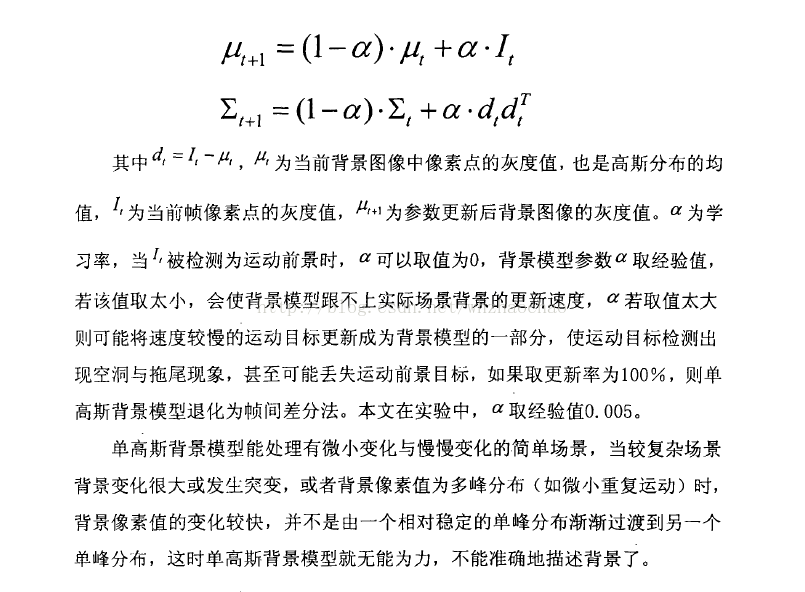
算法原理
Opencv实现
/*******************单高斯背景建模v1.0*************************
************************2010.01.22****************************/
#include <highgui.h>
#include <cv.h>
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
int main(int argc, char **argv)
{
//新建窗口
cvNamedWindow("origin", CV_WINDOW_AUTOSIZE);
cvNamedWindow("processing", CV_WINDOW_AUTOSIZE);
double alpha = 0.05; //背景建模alpha值
double std_init = 20; //初始标准差
double var_init = std_init * std_init; //初始方差
double lamda = 2.5 * 1.2; //背景更新参数
char* fileName="E:\\研二上\\video\\highway.AVI";
//视频文件
CvCapture *capture = NULL;
// //读取视频文件
// if (argc == 1)
// {
// //从摄像头读入
// capture = cvCreateCameraCapture(0);
// }
// else if (argc == 2)
// {
// //从文件读入
// capture = cvCreateFileCapture(argv[1]);
// }
// else
// {
// //读入错误
// printf("input error\n");
// return -1;
// }
capture = cvCreateFileCapture(fileName);
IplImage *frame = NULL; //原始图像
IplImage *frame_u = NULL; //期望图像
IplImage *frame_var = NULL; //方差图像
IplImage *frame_std = NULL; //标准差
CvScalar pixel = {0}; //像素原始值
CvScalar pixel_u = {0}; //像素期望
CvScalar pixel_var = {0}; //像素方差
CvScalar pixel_std = {0}; //像素标准差
//初始化frame_u, frame_var, frame_std
frame = cvQueryFrame(capture);
frame_u = cvCreateImage(cvSize(frame->width, frame->height), IPL_DEPTH_8U, 3);
frame_var = cvCreateImage(cvSize(frame->width, frame->height), IPL_DEPTH_8U, 3);
frame_std = cvCreateImage(cvSize(frame->width, frame->height), IPL_DEPTH_8U, 3);
for (int y = 0; y < frame->height; ++y)
{
for (int x = 0; x < frame->width; ++x)
{
pixel = cvGet2D(frame, y, x);
pixel_u.val[0] = pixel.val[0];
pixel_u.val[1] = pixel.val[1];
pixel_u.val[2] = pixel.val[2];
pixel_std.val[0] = std_init;
pixel_std.val[1] = std_init;
pixel_std.val[2] = std_init;
pixel_var.val[0] = var_init;
pixel_var.val[1] = var_init;
pixel_var.val[2] = var_init;
cvSet2D(frame_u, y, x, pixel_u);
cvSet2D(frame_var, y, x, pixel_var);
cvSet2D(frame_std, y, x, pixel_std);
}
}
while (cvWaitKey(33) != 27) //按ESC键退出, 帧率33ms
{
frame = cvQueryFrame(capture);
//视频结束退出
if (!frame)
{
break;
}
//单高斯背景更新
for (int y = 0; y < frame->height; ++y)
{
for (int x = 0; x < frame->width; ++x)
{
pixel = cvGet2D(frame, y, x);
pixel_u = cvGet2D(frame_u, y, x);
pixel_std = cvGet2D(frame_std, y, x);
pixel_var = cvGet2D(frame_var, y, x);
//|I-u| < lamda*std 时认为是背景, 进行更新
if (fabs(pixel.val[0] - pixel_u.val[0]) < lamda * pixel_std.val[0] &&
fabs(pixel.val[1] - pixel_u.val[1]) < lamda * pixel_std.val[1] &&
fabs(pixel.val[2] - pixel_u.val[2]) < lamda * pixel_std.val[2])
{
//更新期望 u = (1-alpha)*u + alpha*I
pixel_u.val[0] = (1 - alpha) * pixel_u.val[0] + alpha * pixel.val[0];
pixel_u.val[1] = (1 - alpha) * pixel_u.val[1] + alpha * pixel.val[1];
pixel_u.val[2] = (1 - alpha) * pixel_u.val[2] + alpha * pixel.val[2];
//更新方差 var = (1-alpha)*var + alpha*(I-u)^2
pixel_var.val[0] = (1 - alpha) * pixel_var.val[0] +
(pixel.val[0] - pixel_u.val[0]) * (pixel.val[0] - pixel_u.val[0]);
pixel_var.val[1] = (1 - alpha) * pixel_var.val[1] +
(pixel.val[1] - pixel_u.val[1]) * (pixel.val[1] - pixel_u.val[1]);
pixel_var.val[2] = (1 - alpha) * pixel_var.val[2] +
(pixel.val[2] - pixel_u.val[2]) * (pixel.val[2] - pixel_u.val[2]);
//更新标准差
pixel_std.val[0] = sqrt(pixel_var.val[0]);
pixel_std.val[1] = sqrt(pixel_var.val[1]);
pixel_std.val[2] = sqrt(pixel_var.val[2]);
//写入矩阵
cvSet2D(frame_u, y, x, pixel_u);
cvSet2D(frame_var, y, x, pixel_var);
cvSet2D(frame_std, y, x, pixel_std);
}
}
}
//显示结果
cvShowImage("origin", frame);
cvShowImage("processing", frame_u);
}
//释放内存
cvReleaseCapture(&capture);
cvReleaseImage(&frame);
cvReleaseImage(&frame_u);
cvReleaseImage(&frame_var);
cvReleaseImage(&frame_std);
cvDestroyWindow("origin");
cvDestroyWindow("processing");
return 0;
}- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
matlab实现
close all;
clear all;
mov=aviread('E:\研二上\video\highway.AVI'); %读入
fnum=size(mov,2); %读取电影的祯数,mov为1*temp
alpah=0.005;
std_init=20;
var_init=std_init*std_init;
lamda=2.5*2.5;
frame=uint8(ones(304,400,3));
frame_u=frame;
frame_var=frame;
frame_std=frame;
% frame=imread('D:\Code\Data\00011\1.bmp');
frame=mov(1).cdata(:,:,:);
frame_u=frame;
frame_var=var_init*frame_var;
frame_std=std_init*frame_std;
for index=2:fnum
% fileName=strcat('D:\Code\Data\00011\',int2str(index),'.','bmp'); %将每祯转成jpg的图片
% frame=imread(fileName);
frame=mov(index).cdata(:,:,:);
[x,y,z]=size(frame);
for i=1:x
for j=1:y
frame_rgb=frame(i,j,:);
frame_u_rgb=frame_u(i,j,:);
frame_std_rgb=frame_std(i,j,:);
frame_var_rgb=frame_var(i,j,:);
if company_rgb(frame_rgb,frame_u_rgb,lamda,frame_std_rgb)
frame_u_rgb=(1-alpah).*frame_u_rgb+alpah.*frame_var_rgb;
frame_var_rgb=(1-alpah).*frame_var_rgb+alpah.*(frame_rgb-frame_u_rgb).^2;
frame_std_rgb=sqrt(double(frame_var_rgb));
frame_u(i,j,:)= frame_u_rgb;
frame_std(i,j,:)=frame_std_rgb;
frame_var(i,j,:)=frame_var_rgb;
end
end
end
subplot(2,1,1);
imshow(frame);
title('src');
subplot(2,1,2);
imshow(frame_u);
title('result');
pause(0.01);
end- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
function [ output_args ] = company_rgb( frame_rgb,frame_u_rgb,lamda,frame_std_rgb )
%UNTITLED2 Summary of this function goes here
% Detailed explanation goes here
var_r=abs(frame_rgb(1)-frame_u_rgb(1));
var_g=abs(frame_rgb(2)-frame_u_rgb(2));
var_b=abs(frame_rgb(3)-frame_u_rgb(3));
if var_r<lamda*frame_std_rgb(1) && var_g<lamda*frame_std_rgb(2) && var_b<lamda*frame_std_rgb(3)
output_args=1;
else
output_args=0;
end
end- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









