



 本文详细介绍Linux系统中ls命令的各种选项及使用方法,包括显示隐藏文件、详细信息展示、目录属性查看等,并解释了文件权限、inode等概念。
本文详细介绍Linux系统中ls命令的各种选项及使用方法,包括显示隐藏文件、详细信息展示、目录属性查看等,并解释了文件权限、inode等概念。
一、查询目录中内容命名ls
1.1 root代表当前登录用户,localhost代表主机名, ~代表当前主机目录,#代表用户权限 #表示超级用户,$表示普通用户;
1.2 查询目录中内容命令 ls (list缩写)
- 格式 ls [选项] [文件或目录]
-
选项(可组合使用):
-a 显示所有文件,包括隐藏文件
-l 显示详细信息
-d 查看目录属性
-h 人性化显示文件大小
-i 显示inode
1.3 pwd命名(Print Working Directory 打印当前工作目录)查看当前目录
- 超级用户root默认的当前目录是 root目录
1.4 打印当前目录下文件信息

1.5 列出所有文件 用 ls -a 把隐藏文件也显示出来

1.6 查看其他目录的文件
1.7 查看具体某个文件,选项l表示显示详细信息

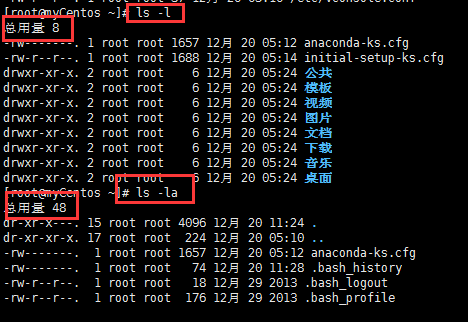
1.8 用 -l 或者 -la 组合 列出详细信息
- 第一列的含义如下:
- 第一位表示文件类型。d是目录文件,l是链接文件,-是普通文件,p是管道
- 第2-4位表示这个文件的属主拥有的权限,r是读,w是写,x是执行。
- 第5-7位表示和这个文件属主所在同一个组的用户所具有的权限。
- 第8-10位表示其他用户所具有的权限。
-
比如 dr-xr-xr-x 这个目录 所有者 所属组 以及其他者 都有 读和执行权限;
比如 -rw------- 这个文件 所有者有读写权限 所属组以及其他者没有权限;
- 第二列:那个数字 是 硬链接次数
- 第三列 root 是 所有者
- 第四列 root 是 所属组;
- 第五列 是文件大小;假如看不惯 可用 ls -lh
- 第六七八列的日期是该文件最后一次修改时间;
- 最后一列 是文件名称;
1.9 查看目录属性 要加 -d

1.10 查看文件的inode属性 类似 主键 唯一识别文件的Id 用 -i


















 1308
1308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









