






 本文转自相关文档,介绍了Python numpy库中线性代数的相关内容。包括分解(如svd奇异值分解)、矩阵特征值计算、范数和其他数字(如矩阵范数、条件数、行列式等)的计算,以及解方程和逆矩阵(如线性矩阵方程求解、最小二乘求解)等函数的使用。
本文转自相关文档,介绍了Python numpy库中线性代数的相关内容。包括分解(如svd奇异值分解)、矩阵特征值计算、范数和其他数字(如矩阵范数、条件数、行列式等)的计算,以及解方程和逆矩阵(如线性矩阵方程求解、最小二乘求解)等函数的使用。
转自:https://docs.scipy.org/doc/numpy-1.13.0/reference/routines.linalg.html
1.分解
//其中我觉得可以的就是svd奇异值分解吧,虽然并不知道数学原理
np.linalg.svd(a, full_matrices=1, compute_uv=1)
a是要分解的(M,N)array;
full_matrices : bool, optional
If True (default), u and v have the shapes (M, M) and (N, N), respectively. Otherwise, the shapes are (M, K) and (K, N), respectively, where K = min(M, N).
当full_matrices是True时(默认):
>>> d=np.mat("4 11 14;8 7 -2") >>> d matrix([[ 4, 11, 14], [ 8, 7, -2]]) >>> U,sigma,V=np.linalg.svd(d) >>> U matrix([[-0.9486833 , -0.31622777], [-0.31622777, 0.9486833 ]]) >>> V matrix([[-0.33333333, -0.66666667, -0.66666667], [ 0.66666667, 0.33333333, -0.66666667], [-0.66666667, 0.66666667, -0.33333333]]) >>> sigma array([18.97366596, 9.48683298]) >>> U.shape,sigma.shape,V.shape ((2, 2), (2,), (3, 3)) >>> S=np.zeros((2,3)) >>> S[:2,:2]=np.diag(sigma) >>> S array([[18.97366596, 0. , 0. ], [ 0. , 9.48683298, 0. ]]) >>> U*S*V matrix([[ 4., 11., 14.], [ 8., 7., -2.]])
当full_matrices是False时:
>>> U,sigma,V=np.linalg.svd(d,full_matrices=0) >>> U matrix([[-0.9486833 , -0.31622777], [-0.31622777, 0.9486833 ]]) >>> sigma array([18.97366596, 9.48683298]) >>> V matrix([[-0.33333333, -0.66666667, -0.66666667], [ 0.66666667, 0.33333333, -0.66666667]]) >>> S=np.diag(sigma)##### >>> S array([[18.97366596, 0. ], [ 0. , 9.48683298]]) >>> U*S*V matrix([[ 4., 11., 14.], [ 8., 7., -2.]])
2.矩阵特征值
np.linalg.eig(a) Compute the eigenvalues and right eigenvectors of a square array.
>>> w,v=LA.eig(np.diag((1,2,3))) >>> w array([1., 2., 3.]) >>> v array([[1., 0., 0.], [0., 1., 0.], [0., 0., 1.]]) >>> np.diag((1,2,3)) array([[1, 0, 0], [0, 2, 0], [0, 0, 3]])
np.linalg.eigvals(g):Compute the eigenvalues of a general matrix.
>>> w2=LA.eigvals(np.diag((1,2,3))) >>> w2 array([1., 2., 3.])
3.范数和其他数字
3.1 np.linalg.norm(x, ord=None, axis=None, keepdims=False):Matrix or vector norm.
Using the axis argument to compute vector norms:axis用来计算矩阵中的向量范数。
>>> a=np.array([3,4]) >>> a array([3, 4]) >>> LA.norm(a) 5.0 >>> LA.norm(a,ord=1) 7.0 >>> a=np.array([3,-4]) >>> LA.norm(a,ord=1) 7.0 >>> LA.norm(a,ord=np.inf) 4.0 >>> LA.norm(a,ord=-np.inf) 3.0
3.2 np.linalg.cond(x, p=None):Compute the condition number of a matrix.
>>> a=np.array([[1, 0, -1], [0, 1, 0], [1, 0, 1]]) >>> a array([[ 1, 0, -1], [ 0, 1, 0], [ 1, 0, 1]]) >>> LA.cond(a) 1.4142135623730951 >>> LA.cond(a,2) 1.4142135623730951 >>> LA.cond(a,1) 2.0
//其中:
p : {None, 1, -1, 2, -2, inf, -inf, ‘fro’}, optional
Order of the norm:
p norm for matrices None 2-norm, computed directly using the SVD‘fro’ Frobenius norm inf max(sum(abs(x), axis=1)) -inf min(sum(abs(x), axis=1)) 1 max(sum(abs(x), axis=0)) -1 min(sum(abs(x), axis=0)) 2 2-norm (largest sing. value) -2 smallest singular value inf means the numpy.inf object, and the Frobenius norm is the root-of-sum-of-squares norm.
使用的范数,默认是L2范数。
3.3 np.linalg.det(a):Compute the determinant of an array.
>>> a = np.array([[1, 2], [3, 4]]) >>> LA.det(a) -2.0000000000000004
3.4 np.linalg.matrix_rank(M, tol=None):Return matrix rank of array using SVD method
>>> LA.matrix_rank(np.eye(4)) 4 >>> I=np.eye(4) >>> I[-1,-1]=0 >>> I array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 0.]]) >>> LA.matrix_rank(I) 3
3.5 trace(a, offset=0, axis1=0, axis2=1, dtype=None, out=None)
>>> np.trace(np.eye(4))
4.0
矩阵对角线上的和。
4.解方程和逆矩阵
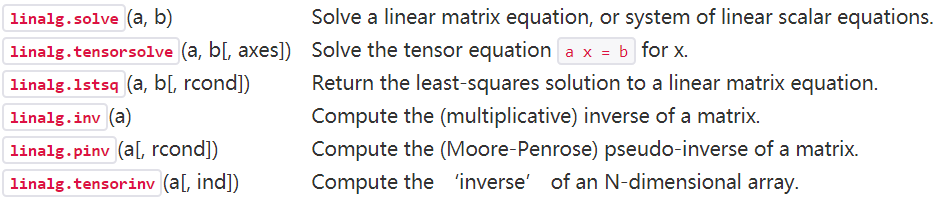
4.1 np.linalg.solve(a,b):Solve a linear matrix equation, or system of linear scalar equations.
Solve the system of equations 3 * x0 + x1 = 9 and x0 + 2 * x1 = 8:
>>> a = np.array([[3,1], [1,2]]) >>> b = np.array([9,8]) >>> x = np.linalg.solve(a, b) >>> x array([ 2., 3.])
check:
>>> np.allclose(np.dot(a, x), b)
True
4.2 np.linalg.lstsq(a, b, rcond=-1):Return the least-squares solution to a linear matrix equation
最小二乘求解。

















 1130
1130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









