



 本文介绍了如何在Hexo博客中配置next主题及其Gemini样式,并解决了第三方域名失效及本地服务器启动无效等问题。
本文介绍了如何在Hexo博客中配置next主题及其Gemini样式,并解决了第三方域名失效及本地服务器启动无效等问题。
配置博客的主题
刚创建的博客是使用的默认主题,在 Hexo 官网寻找了自己喜欢的主题: next。
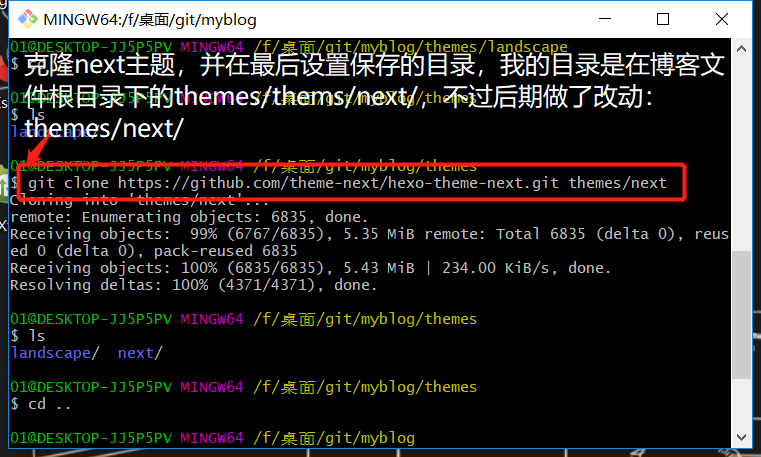
首先是对主题进行克隆,见图吧
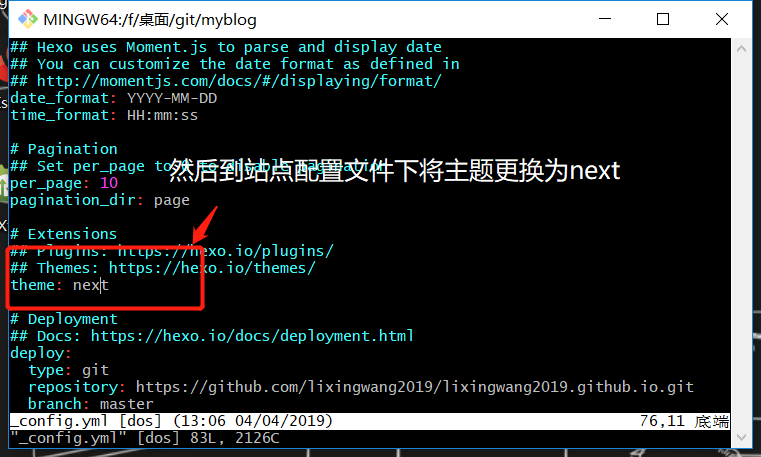
接下来就是去站点配置文件下,修改主题名


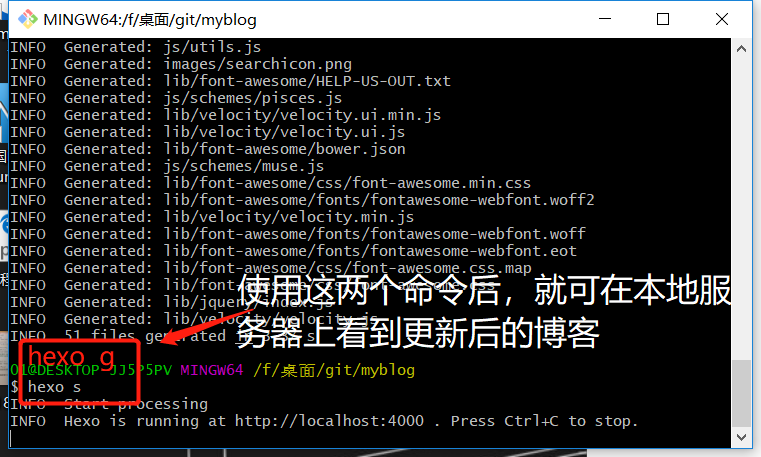
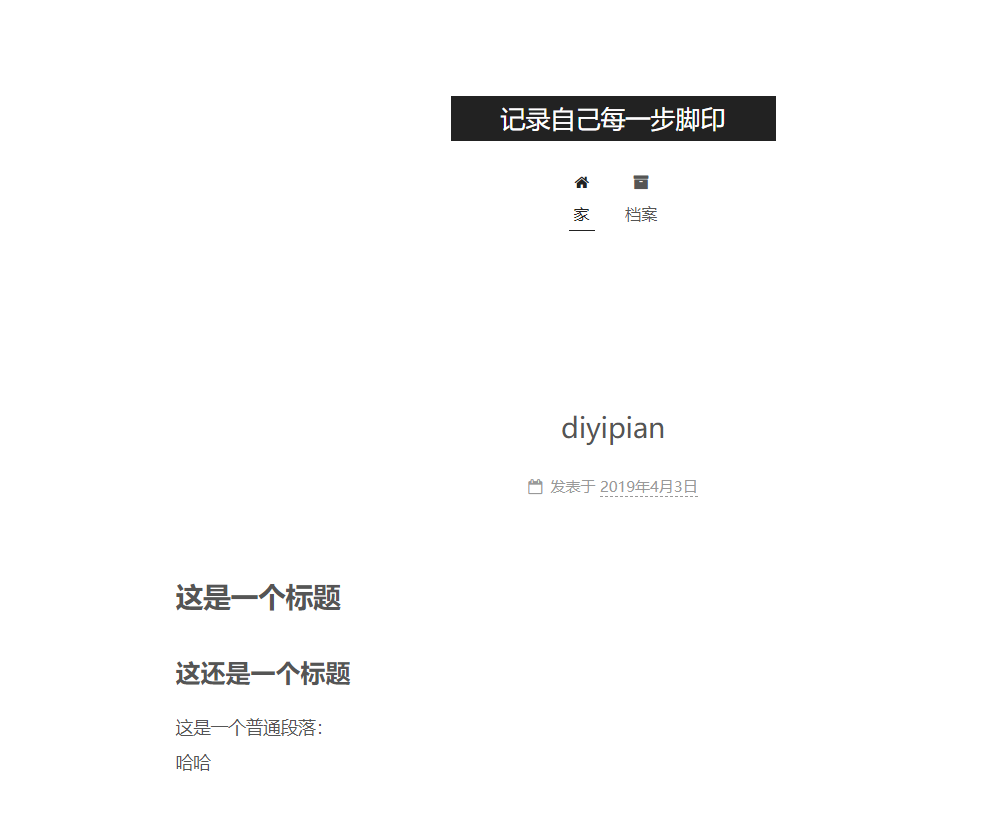
接下来在本地服务器上看一下更改主题后的博客
由于
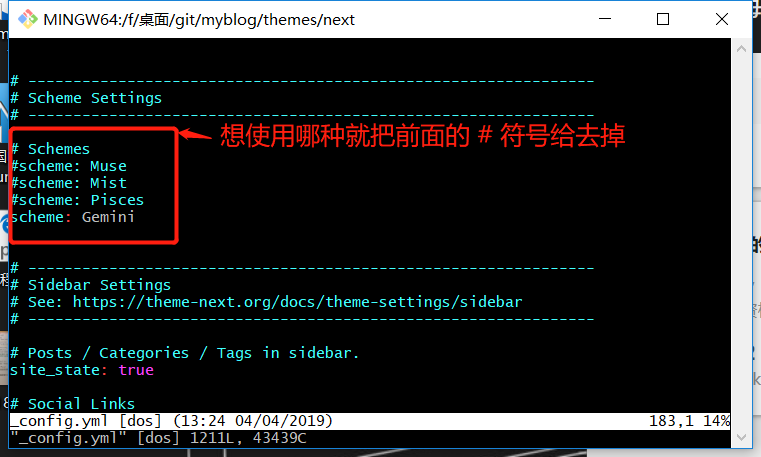
next主题中窗口显示有不同的排版,我比较喜欢的是 Gemini 的, 那么怎么修改呢?先打开主题配置文件(多注意所在的目录), 进入后找到 Schemes ,见图
修改后的博客就是这样的





在配置的过程中出现的问题
- 每次将博客上传到 GitHub 上后第三方域名就是失效了
:
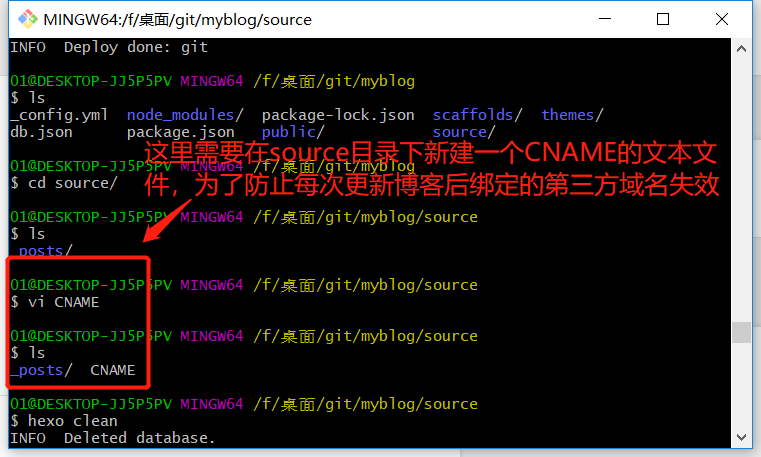
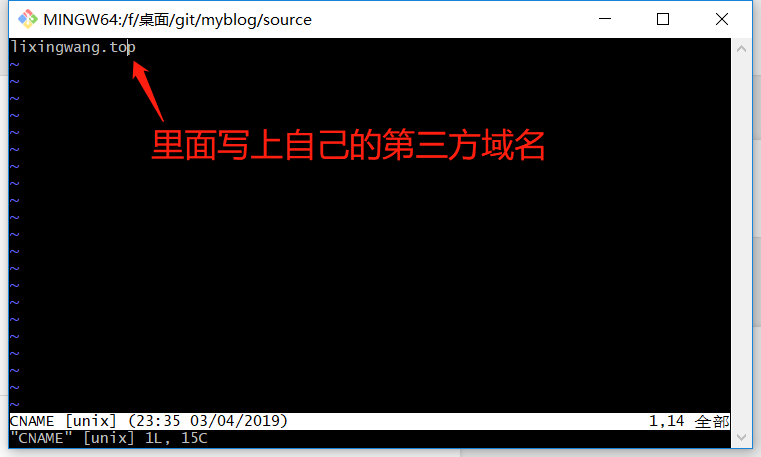
解决方案(直接见图)
之后再部署到 GitHub 上后,第三方域名就不会失效,也有别的方案,那就需要参考大神的了


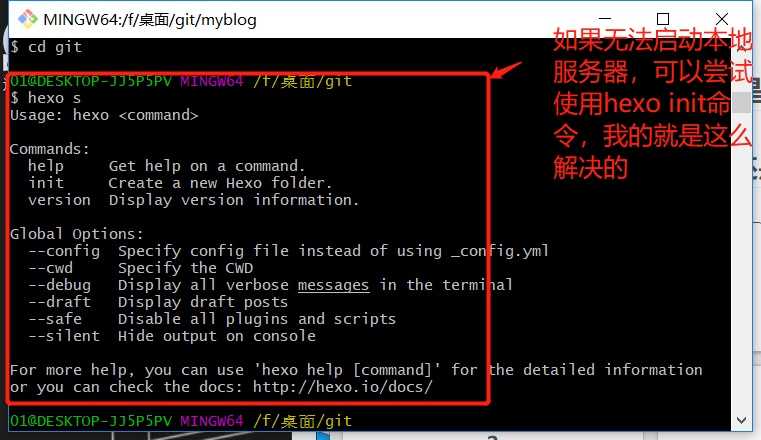
2 .启动本地服务器无效(直接见图)

为博客设置标签和分类栏目
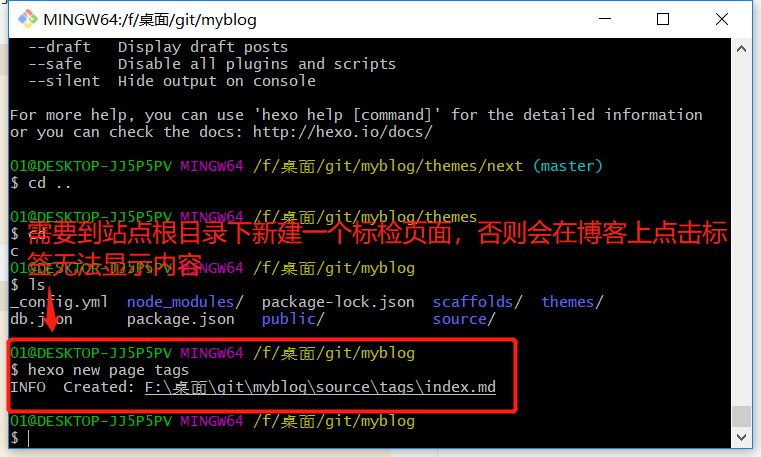
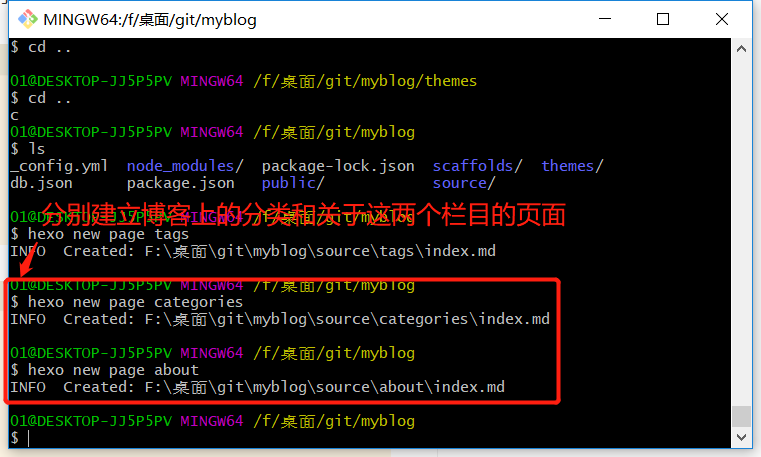


设置这两个栏目后,会生成相对应的文档
为博客设置 GitHub
- 首先要在主题配置文件中找到 social ,再进行修改
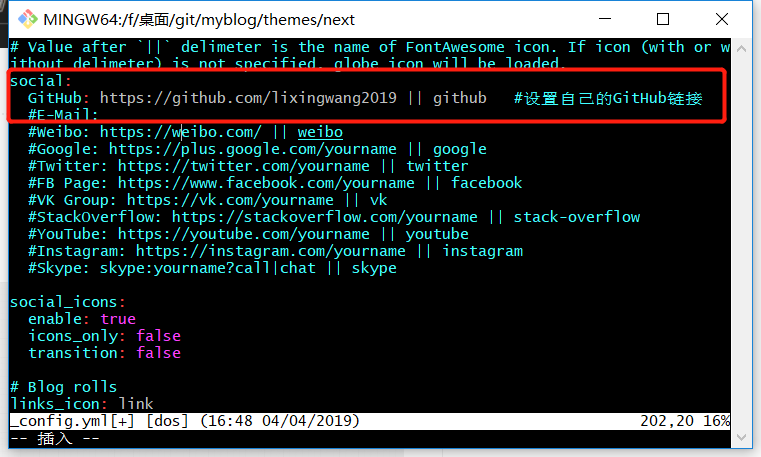

- 注意图中的两横杆后的 github 是表示图片,显示如下

配置底部的建站日期和作者
是在主题配置文件中进行修改


经过如上配置后博客底部显示如下


总结
首先我只是为博客配置了一点点功能,我配置时看了很多大佬的博客,那真是各有千秋
lixingwnag.top
上面是我的博客,大概一共花费了3天的时间,参考了大量大佬的文章,刚开始的时候前几步还很简单,但是配置主题的时候就毫无头绪,但是经过不断的尝试好像慢慢知道了在博客文件下的一些文件的用途,以及文件里面少部分的功能用途
俗话说万事开头难,经过这次的折腾深刻体会到了这句话;都已经开头了,后面就会慢慢熟练起来
贵在坚持
若有问题欢迎指出

















 14万+
14万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









