






 本文介绍了MATLAB新旧标定工具箱的使用方法。新工具箱操作简单,添加图像后即可校正畸变;旧工具箱需手动选择角点。文章提供了注意事项,如图像尺寸、相机光心位置及误差范围等。
本文介绍了MATLAB新旧标定工具箱的使用方法。新工具箱操作简单,添加图像后即可校正畸变;旧工具箱需手动选择角点。文章提供了注意事项,如图像尺寸、相机光心位置及误差范围等。
记录一下MATLAB标定工具箱的使用。
MATLAB标定工具箱有新旧两种,简单来说,需要自己下载toolbox_calib文件并使用calib命令启动的是旧的标定工具箱,新的工具箱则位于MATLAB中的APPS下拉菜单中。
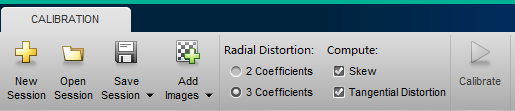
对新的工具箱,完全傻瓜式操作,添加完图像后,按照下图勾选相应选项,即可校正切向和径向畸变,然后点击Calibrate按钮即可得到相机内参和畸变参数;
对旧的工具箱,具体可参考这篇博文,需要注意的是,在依次点击图像角点时,需要按照顺时针,但无需每次都从棋盘格的同一位置开始。
下面说一下注意事项:
1. 实际使用多大的图像,就采集多大的图像用于标定,比如我实际要用640*480,则用于标定的图像也要裁剪到640*480;
2.相机光心一般在图像中心,标定完后一般不会相差太多,比如我的图像理论光心在[320 240],标定数据为[321.4 231.5];
3. 对旧工具箱,标定完后的相机内参,误差应该在10以内,对新工具箱,直方图误差应该在0.1以内;
4. 采集标定图像时,应该移动棋盘格,使其尽量在图像的各个位置都出现过,以便在校正畸变时,能有较好的效果;
5. 尽量采用20幅以上的图像。
标定时常用术语的中英文对照:
内参矩阵: Intrinsic Matrix
焦距: Focal Length
主点: Principal Point
径向畸变: Radial Distortion
切向畸变: Tangential Distortion
旋转矩阵: Rotation Matrices
平移向量: Translation Vectors
平均重投影误差: Mean Reprojection Error
重投影误差: Reprojection Errors
重投影点: Reprojected Points

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









