






 本文详细解析了STM32的启动代码,介绍了其如何初始化堆栈、设置中断向量表,并解释了为何需要这些配置。
本文详细解析了STM32的启动代码,介绍了其如何初始化堆栈、设置中断向量表,并解释了为何需要这些配置。
对于熟悉电脑的伙伴们来说,BIOS(那个蓝色的界面)可能不会太陌生吧,这货就是电脑的启动代码。没有BIOS的电脑,那注定是一块板砖!BIOS主要是做一些开机前的准备工作,例如系统时间设定、启动顺序。。。扯远了
其实电脑本身就是从单片机而来,那么单片机也是有启动代码的,只是我们绝大部分情况 不去关心它。
启动代码究竟都干了些什么工作,为何需要它?想想你在c语言中用到了什么东西,而这些东西却是拿来就可以用的?堆、栈!没错,就是他们。我们知道堆和栈是内存中划分出的一块区域,那为什么我们没有亲自划分呢,因为启动代码帮了你的忙!!!再想想单片机工作的时候,有哪些配置被我们忽略了,而它却可以用?时钟,就是这货,我们可以不配置时钟,而你发现它竟然有默认值!还是启动代码帮了你
接下来仔细研究一下stm32的启动代码,首先要知道启动代码藏在哪里:一个叫做startup的汇编文件。启动代码是对硬件的一个最初级的配置,它必须用汇编语言来实现,汇编是真正的硬件编程语言。
从上到下解读启动代码
1、定义栈大小

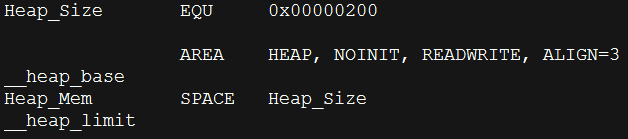
2、定义堆大小
3、中断向量地址
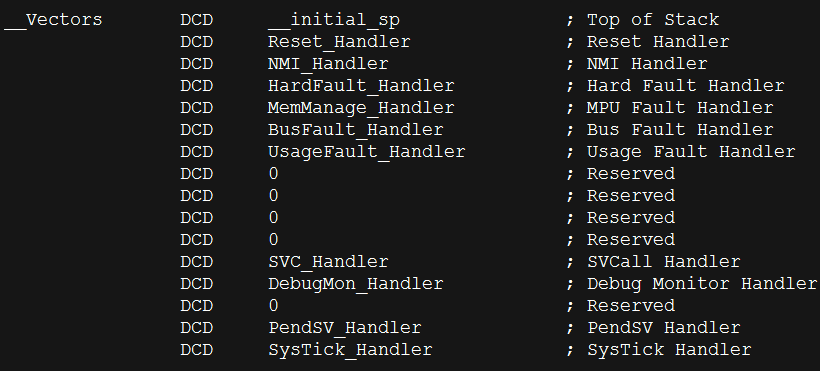
ps:Cortex-M4内核要求内存的第一个地址是栈指针,第二个地址开始为中断向量。而中断向量的第一个必须是复位,因为代码是从上到下执行,开机首先遇到的就是复位
4、复位中断处理函数
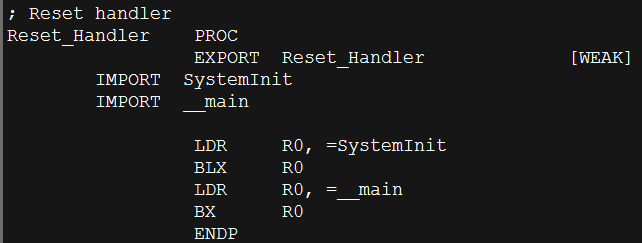
ps1:仔细那看有两个东西需要注意:“SystemInit”这个是时钟初始,“__main”这一句代表跳转到“main”函数。正因为复位这样的写法,所以程序都是从main函数开始执行的
ps2:“SystemInit”具体实现过程在stm32fxxx.c,“__main”也是在某个地方与真正的main关联起来
5、其他中断处理函数
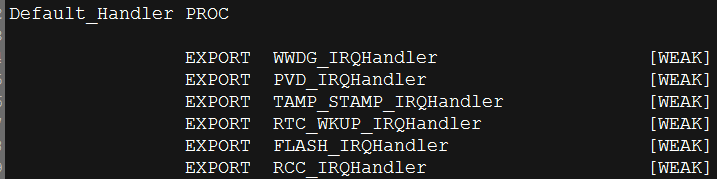
ps1:绝大部分中断的实现系统没有给出,等待程序猿去写。但是中断的名字我们都可以看到的,每一个名字都和上面向量表中对应着。我们知道函数名其实就是一个地址,而中断的入口地址是固定的,只要找对名字,那地址也就找对了。
ps2:中断的入口地址由内核和芯片决定,无法更改。因此不要改启动代码中的中断向量表
6、初始化堆、栈
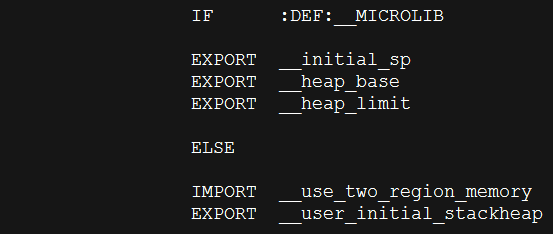
ps:正因为堆和栈已经被初始化,所以你的C语言才可以顺利的执行


















 1757
1757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









