



 本文介绍了匈牙利算法的基本原理及其在解决最大匹配问题中的应用,通过具体实例进行详细解析,并提供了一道相关算法题目的解题思路及代码实现。
本文介绍了匈牙利算法的基本原理及其在解决最大匹配问题中的应用,通过具体实例进行详细解析,并提供了一道相关算法题目的解题思路及代码实现。
一、关于匈牙利算法
匈牙利算法是由匈牙利数学家Edmonds提出的,用增广路径求二分图最大匹配的算法。
听起来高端,其实说白了就是:
假设不存在单相思(单身狗偷偷抹眼泪),在一个同性恋不合法的国家里(不存在任何歧视#正色),有一些男人和女人,他们互相之间存在一些互相爱恋的关系。而匈牙利算法就是要促成尽量多的男女配对。
如下图:
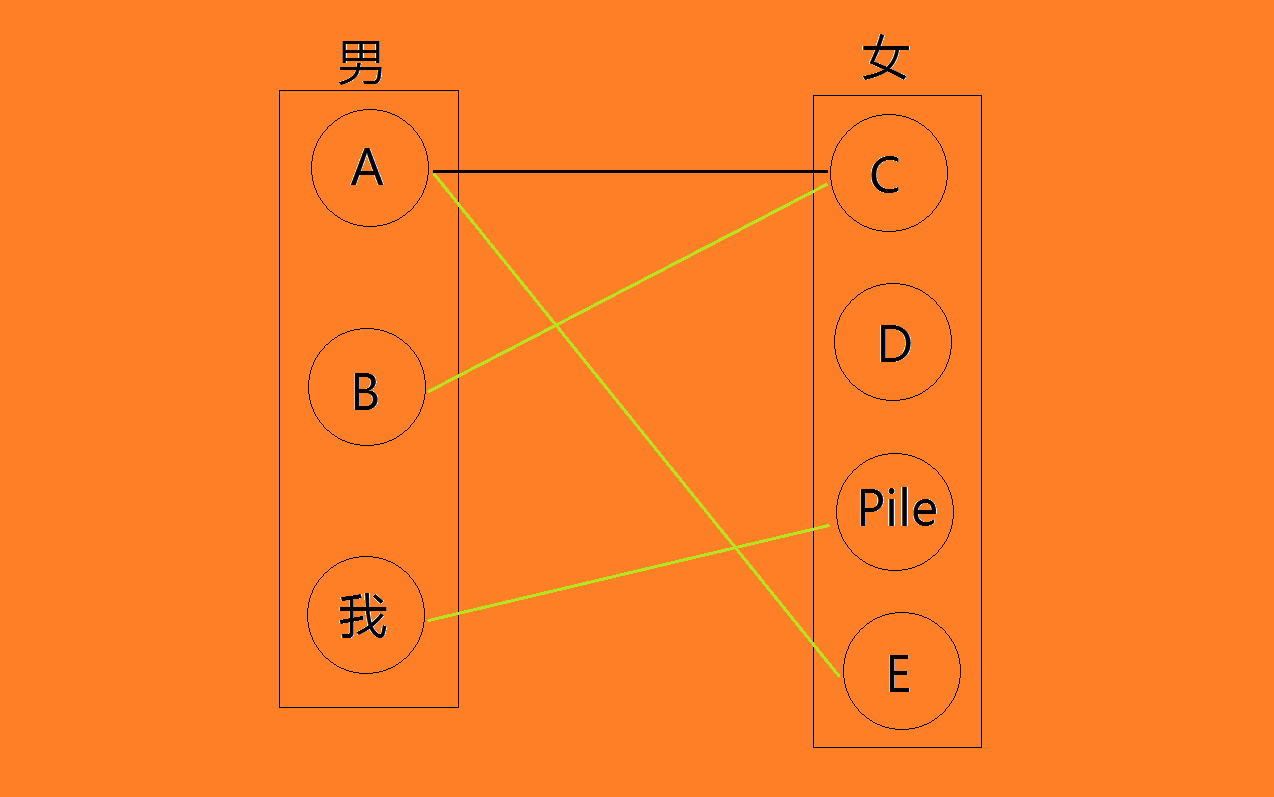
绿色标注的就是这张图的一个最大二分图匹配。
先提一个下面会提到的名词:
增广路:若P是图G中一条连通两个未匹配顶点的路径,并且属于M的边和不属于M的边(即已匹配和待匹配的边)在P上交替出现,则称P为相对于M的一条增广路径。
下面讲讲匈牙利算法的思路:
1、依次从一个部分的每个顶点出发,寻找一条增广路;
2、遍历所有当前点能到达的点,若找到一条增广路,就更新匹配数,并返回1;否则重复二,直至所有点被遍历;
3、若以当前点能到达的所有点被遍历仍未找到一条可增广路,返回1。
显然,由于寻找增广路的过程需要深搜,所以匈牙利算法是一个基于dfs的算法。思路很简单,所以我就不贴伪代码了才不是因为懒而且还不会写伪代码(划掉),反正hero是裸题,题解里也有模板。
二、HNOI2006 hero超级英雄题解
题目描述:
现在电视台有一种节目叫做超级英雄,大概的流程就是每位选手到台上回答主持人的几个问题,然后根据回答问题的多少获得不同数目的奖品或奖金。主持人问题准备了若干道题目,只有当选手正确回答一道题后,才能进入下一题,否则就被淘汰。为了增加节目的趣味性并适当降低难度,主持人总提供给选手几个“锦囊妙计”,比如求助现场观众,或者去掉若干个错误答案(选择题)等等。 这里,我们把规则稍微改变一下。假设主持人总共有m道题,选手有n种不同的“锦囊妙计”。主持人规定,每道题都可以从两种“锦囊妙计”中选择一种,而每种“锦囊妙计”只能用一次。我们又假设一道题使用了它允许的锦囊妙计后,就一定能正确回答,顺利进入下一题。现在我来到了节目现场,可是我实在是太笨了,以至于一道题也不会做,每道题只好借助使用“锦囊妙计”来通过。如果我事先就知道了每道题能够使用哪两种“锦囊妙计”,那么你能告诉我怎样选择才能通过最多的题数吗?
输入:
输入文件的一行是两个正整数n和m(0 < n <1001,0 < m < 1001)表示总共有n中“锦囊妙计”,编号为0~n-1,总共有m个问题。
以下的m行,每行两个数,分别表示第m个问题可以使用的“锦囊妙计”的编号。
注意,每种编号的“锦囊妙计”只能使用一次,同一个问题的两个“锦囊妙计”可能一样。
输出:
第一行为最多能通过的题数p。
样例输入:
5 6
3 2
2 0
0 3
0 4
3 2
3 2
样例输出:
4
数据范围:
0 < n , m < 1001
绝对的裸题,裸得让我怀疑这是我在bzoj上见到的。附上链接→_→http://www.lydsy.com/JudgeOnline/problem.php?id=1191
代码如下:


1 #include<stdio.h> 2 #include<string.h> 3 struct node 4 { 5 int v; 6 int next; 7 }; 8 node e[3010]; 9 int st[3010],cnt; 10 int n,m; 11 bool vis[3010];//判断当遍搜索中某个点是否被走过 12 int link[3010];//判断左右端点是否相连 link[i]=j代表锦囊i与问题j相连,特别的,当link[i]=0时表示i是一个未盖点 13 void build(int a,int b) 14 { 15 e[++cnt].v=b; 16 e[cnt].next=st[a]; 17 st[a]=cnt; 18 }//建图,问题连向锦囊 19 bool dfs(int x) 20 { 21 int i; 22 for(i=st[x];i!=0;i=e[i].next) 23 { 24 if(vis[e[i].v])continue;//如果被枚举点已经被访问过,就跳过这个点 25 vis[e[i].v]=true; 26 int temp=e[i].v; 27 if(!link[temp]||dfs(link[temp]))//若temp是一个未盖点或从temp对应的问题开始有可增广路,就将temp对应的问题更改为x,并且认为存在从x开始的增广路 28 { 29 link[temp]=x; 30 return true; 31 } 32 } 33 return false; 34 } 35 int main() 36 { 37 scanf("%d%d",&n,&m); 38 int a,b,i,ans=0; 39 for(i=1;i<=m;i++) 40 { 41 scanf("%d%d",&a,&b); 42 build(i,a); 43 build(i,b); 44 }//建图,问题连向锦囊 45 for(i=1;i<=m;i++) 46 { 47 memset(vis,false,sizeof(vis)); 48 if(dfs(i))ans++; 49 else break;//这句一定要加!一定要加!一定要加!说三遍 ←__ ← 最开始没加无限WA,后来意识到这是个闯关游戏,一关没过游戏结束,就不往后做了 50 } 51 printf("%d",ans); 52 return 0; 53 }
弱弱地说一句,本蒟蒻码字也不容易,转载请注明出处http://www.cnblogs.com/Maki-Nishikino/p/5873296.html

















 341
341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









