



 本文提供了一步一步的教程,指导读者在Ubuntu系统上安装Matlab R2017b,并解决roscore启动失败、roslaunch文件夹问题。主要内容包括设置固定ROS_IP,修改.bashrc文件,以及交互式案例。
本文提供了一步一步的教程,指导读者在Ubuntu系统上安装Matlab R2017b,并解决roscore启动失败、roslaunch文件夹问题。主要内容包括设置固定ROS_IP,修改.bashrc文件,以及交互式案例。
ros与matlab联动使用
联动使用教程
1 ubuntu18.04或16.04下安装matlab R2017b
参考链接
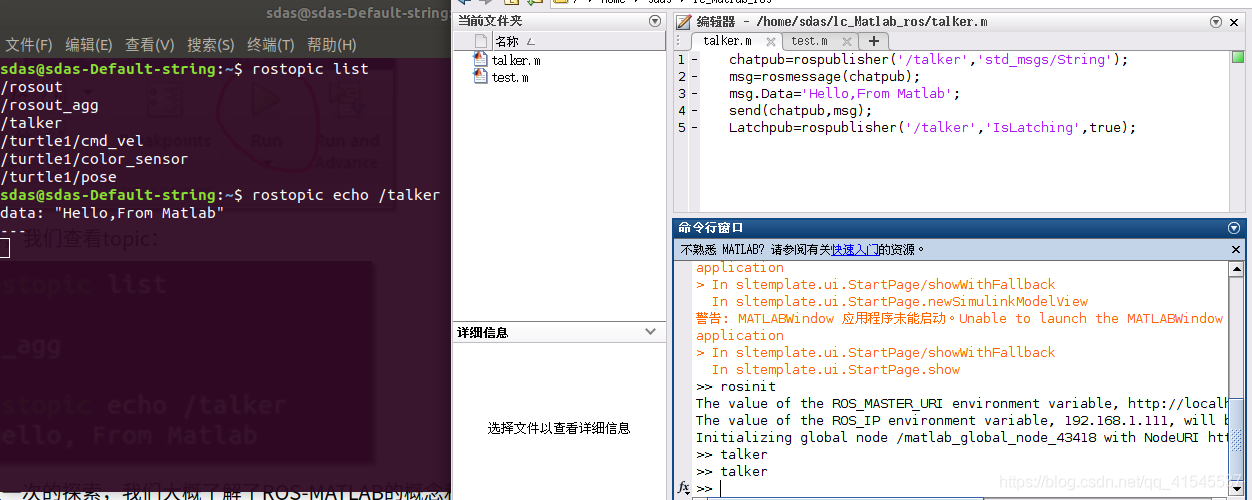
2 ubuntu下基于matlab启动ros
matlab中常用命令如下:
查看robotics system toolbox工具箱是否安装成功
help robotics.ros
rosinit ——表示启动ROS,相当于roscore
rosshutdown ——表示关闭ROS
1)列出topic列表
rostopic list
2)查看topic 信息
rostopic info /torso_lift_imu/data
3)打印topic 信息
rostopic echo /torso_lift_imu/data
交互式运行案例
matlab下使用ros的相关命令参考ROS 与 MATLAB 通讯
3 matlab与ubuntu联动后,roscore启动失败问题
1) roscore启动失败问题
解决方案:
通过查阅资料,发现以下方式可解决
ifconfig 查看ip地址
sudo gedit ~/.bashrc打开后填入以下内容
export ROS_IP=192.168.1.109
之所以失败原因就在于此,重启电脑后,ip地址变了,此处思考一个固定ip的方法应该就省事了
source ~/.bashrc
2)某一文件夹下的roslaunch启动失败问题
该文件夹前输入如下命令再重新启动就可以了
export ROS_MASTER_URI=http://192.168.1.109:11311/
3)针对1)与2)问题的一次性搞定方案
gedit ~/.bashrc
修改一下两个指令:修改后Save
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
接下来,我们在运行roscore就可以啦
思路来源参考 资料

















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









