



 本文详细介绍了Linux系统中的I2C驱动体系结构,包括I2C核心、I2C总线驱动和I2C设备驱动三部分。阐述了各组成部分的关键数据结构及其作用,以及如何在Linux中实现具体的I2C适配器和设备驱动。
本文详细介绍了Linux系统中的I2C驱动体系结构,包括I2C核心、I2C总线驱动和I2C设备驱动三部分。阐述了各组成部分的关键数据结构及其作用,以及如何在Linux中实现具体的I2C适配器和设备驱动。

本章导读
I2C总线仅仅使用SCL、SDA这两根信号线就实现了设备之间的数据交互,极大地简化了对硬件资源和PCB板布线空间的占用。因此,I2C总线非常广泛地应用在EEPROM、实时时钟、小型LCD等设备与CPU的接口中。
Linux系统定义了I2C驱动体系结构。在Linux系统中,I2C驱动由3部分组成,即I2C核心、I2C总线驱动和I2C设备驱动。这3部分相互协作,形成了非常通用、可适应性很强的I2C框架。
Linux I2C体系结构
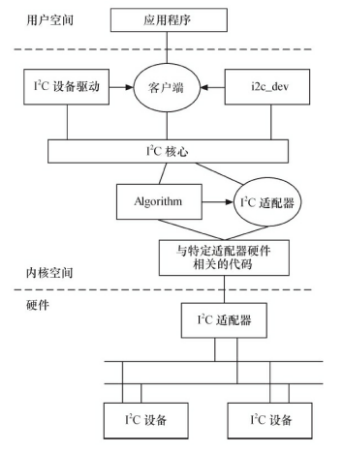
Linux的I2C体系结构分为3个部分组成。
(1) I2C核心
I2C核心提供了I2C总线驱动和设备驱动的注册、注销方法,I2C通信方法(即Algorithm)上层的与具体设备无关的代码以及探测设备、检测设备地址的上层代码等,如下图所示。
(2) I2C总线驱动
I2C总线驱动是对I2C硬件体系结构中适配器端的实现,适配器可由CPU控制,甚至可以直接集成在CPU内部。
I2C总线驱动主要包含I2C适配器数据结构i2c_adapter、I2C适配器的Algorithm数据结构i2c_algorithm和控制I2C适配器产生通信信号的函数。
经由I2C总线驱动的代码,我们可以控制I2C适配器以主控方式产生开始位、停止位、读写周期,以及以从设备方式被读写、产生ACK等。
(3) I2C设备驱动
I2C设备驱动(也称为客户驱动)是对I2C硬件体系结构中设备端的实现,设备一般挂接在受CPU控制的I2C适配器上,通过I2C适配器与CPU交换数据。
I2C设备驱动主要包含数据结构i2c_driver和i2c_client,我们需要根据具体设备实现其中的成员函数。
在Linux内核2.6中,所有的I2C设备都在sysfs文件系统中显示,存于/sys/bus/i2c目录下,以适配器地址和芯片地址的形式列出,例如:

在Linux内核源代码中的drivers目录下有一个i2c目录,而在i2c目录下又包含如下文件和文件夹。
(1) i2c-core.c
这个文件实现了I2C核心的功能以及/proc/bus/i2c*接口。
(2) i2c-dev.c
实现了I2C适配器设备文件的功能,每个I2C适配器都被分配一个设备。通过适配器访问设备时的主设备号都为89,次设备号为0-255。应用程序通过i2c-%d文件名并使用文件操作接口open()、write()、read()、ioctl()和close()等来访问这个设备。
i2c-dev.c并不是针对特定的设备而设计的,只是提供了通用的read()、write()和ioctl()等接口,应用层可以借用这些接口访问挂接在适配器上的I2C设备的存储空间或寄存器,并控制I2C设备的工作方式。
(3) busses文件夹
这个文件包含了一些I2C主机控制器的驱动,如i2c-tegra.c、i2c-omap.c等。
(4) algos文件夹
实现了一些I2C总线适配器的通信方法。
此外,内核中的i2c.h头文件对i2c_adapter、i2c_algorithm、i2c_driver和i2c_client这4个数据结构进行了定义。理解这4个数据结构的作用十分重要,它们的定义位于kernel/include/linux/i2c.h文件中,下面的代码清单分别对它们进行了描述。
i2c_adapter结构体:
/*
* i2c_adapter is the structure used to identify a physical i2c bus along
* with the access algorithms necessary to access it.
*/
struct i2c_adapter {
struct module *owner;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* data fields that are valid for all devices */
struct rt_mutex bus_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr;
char name[48];
struct completion dev_released;
struct mutex userspace_clients_lock;
struct list_head userspace_clients;
struct i2c_bus_recovery_info *bus_recovery_info;
};i2c_algorithm结构体:
/*
* The following structs are for those who like to implement new bus drivers:
* i2c_algorithm is the interface to a class of hardware solutions which can
* be addressed using the same bus algorithms - i.e. bit-banging or the PCF8584
* to name two of the most common.
*/
struct i2c_algorithm {
/* If an adapter algorithm can't do I2C-level access, set master_xfer
to NULL. If an adapter algorithm can do SMBus access, set
smbus_xfer. If set to NULL, the SMBus protocol is simulated
using common I2C messages */
/* master_xfer should return the number of messages successfully
processed, or a negative value on error */
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality) (struct i2c_adapter *);
};上述master_xfer代码对应为I2C传输函数指针,I2C 主机驱动的大部分工作也聚集在这里。上述smbus_xfer代码对应SMBus传输函数指针,SMBus不需要增加额外引脚,与I2C总线相比,在访问时序上也有一定的差异。
i2c_driver结构体:
/**
* struct i2c_driver - represent an I2C device driver
* @class: What kind of i2c device we instantiate (for detect)
* @attach_adapter: Callback for bus addition (deprecated)
* @probe: Callback for device binding
* @remove: Callback for device unbinding
* @shutdown: Callback for device shutdown
* @suspend: Callback for device suspend
* @resume: Callback for device resume
* @alert: Alert callback, for example for the SMBus alert protocol
* @command: Callback for bus-wide signaling (optional)
* @driver: Device driver model driver
* @id_table: List of I2C devices supported by this driver
* @detect: Callback for device detection
* @address_list: The I2C addresses to probe (for detect)
* @clients: List of detected clients we created (for i2c-core use only)
*
* The driver.owner field should be set to the module owner of this driver.
* The driver.name field should be set to the name of this driver.
*
* For automatic device detection, both @detect and @address_list must
* be defined. @class should also be set, otherwise only devices forced
* with module parameters will be created. The detect function must
* fill at least the name field of the i2c_board_info structure it is
* handed upon successful detection, and possibly also the flags field.
*
* If @detect is missing, the driver will still work fine for enumerated
* devices. Detected devices simply won't be supported. This is expected
* for the many I2C/SMBus devices which can't be detected reliably, and
* the ones which can always be enumerated in practice.
*
* The i2c_client structure which is handed to the @detect callback is
* not a real i2c_client. It is initialized just enough so that you can
* call i2c_smbus_read_byte_data and friends on it. Don't do anything
* else with it. In particular, calling dev_dbg and friends on it is
* not allowed.
*/
struct i2c_driver {
unsigned int class;
/* Notifies the driver that a new bus has appeared. You should avoid
* using this, it will be removed in a near future.
*/
int (*attach_adapter)(struct i2c_adapter *) __deprecated;
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *, pm_message_t mesg);
int (*resume)(struct i2c_client *);
/* Alert callback, for example for the SMBus alert protocol.
* The format and meaning of the data value depends on the protocol.
* For the SMBus alert protocol, there is a single bit of data passed
* as the alert response's low bit ("event flag").
*/
void (*alert)(struct i2c_client *, unsigned int data);
/* a ioctl like command that can be used to perform specific functions
* with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
};i2c_client结构体:
/**
* struct i2c_client - represent an I2C slave device
* @flags: I2C_CLIENT_TEN indicates the device uses a ten bit chip address;
* I2C_CLIENT_PEC indicates it uses SMBus Packet Error Checking
* @addr: Address used on the I2C bus connected to the parent adapter.
* @name: Indicates the type of the device, usually a chip name that's
* generic enough to hide second-sourcing and compatible revisions.
* @adapter: manages the bus segment hosting this I2C device
* @driver: device's driver, hence pointer to access routines
* @dev: Driver model device node for the slave.
* @irq: indicates the IRQ generated by this device (if any)
* @detected: member of an i2c_driver.clients list or i2c-core's
* userspace_devices list
*
* An i2c_client identifies a single device (i.e. chip) connected to an
* i2c bus. The behaviour exposed to Linux is defined by the driver
* managing the device.
*/
struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct i2c_driver *driver; /* and our access routines */
struct device dev; /* the device structure */
int irq; /* irq issued by device */
struct list_head detected;
};下面分析i2c_adapter、i2c_algorithm、i2c_driver和i2c_client这4个数据结构的作用以及其盘根错节的关系。
(1) i2c_adapter与i2c_algorithm
i2c_adapter对应于物理上的一个适配器,而i2c_algorithm对应一套通信方法。一个I2C适配器需要i2c_algorithm提供的通信函数来控制适配器产生特定的访问周期。缺少i2c_algorithm的i2c_adapter什么也做不了,因此i2c_adapter中包含所使用的i2c_algorithm指针。
i2c_algorithm中的关键函数master_xfer()用于产生I2C访问周期需要的信号,以i2c_msg为单位。i2c_msg结构体也是非常重要的,它定义于kernel/include/uapi/linux/i2c.h中,下面的代码清单给出了i2c_msg结构体的定义,其主要成员表明了I2C的传输地址、方向、缓冲区、缓冲区长度等信息。
i2c_msg结构体:
/**
* struct i2c_msg - an I2C transaction segment beginning with START
* @addr: Slave address, either seven or ten bits. When this is a ten
* bit address, I2C_M_TEN must be set in @flags and the adapter
* must support I2C_FUNC_10BIT_ADDR.
* @flags: I2C_M_RD is handled by all adapters. No other flags may be
* provided unless the adapter exported the relevant I2C_FUNC_*
* flags through i2c_check_functionality().
* @len: Number of data bytes in @buf being read from or written to the
* I2C slave address. For read transactions where I2C_M_RECV_LEN
* is set, the caller guarantees that this buffer can hold up to
* 32 bytes in addition to the initial length byte sent by the
* slave (plus, if used, the SMBus PEC); and this value will be
* incremented by the number of block data bytes received.
* @buf: The buffer into which data is read, or from which it's written.
*
* An i2c_msg is the low level representation of one segment of an I2C
* transaction. It is visible to drivers in the @i2c_transfer() procedure,
* to userspace from i2c-dev, and to I2C adapter drivers through the
* @i2c_adapter.@master_xfer() method.
*
* Except when I2C "protocol mangling" is used, all I2C adapters implement
* the standard rules for I2C transactions. Each transaction begins with a
* START. That is followed by the slave address, and a bit encoding read
* versus write. Then follow all the data bytes, possibly including a byte
* with SMBus PEC. The transfer terminates with a NAK, or when all those
* bytes have been transferred and ACKed. If this is the last message in a
* group, it is followed by a STOP. Otherwise it is followed by the next
* @i2c_msg transaction segment, beginning with a (repeated) START.
*
* Alternatively, when the adapter supports I2C_FUNC_PROTOCOL_MANGLING then
* passing certain @flags may have changed those standard protocol behaviors.
* Those flags are only for use with broken/nonconforming slaves, and with
* adapters which are known to support the specific mangling options they
* need (one or more of IGNORE_NAK, NO_RD_ACK, NOSTART, and REV_DIR_ADDR).
*/
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_TEN 0x0010 /* this is a ten bit chip address */
#define I2C_M_RD 0x0001 /* read data, from slave to master */
#define I2C_M_STOP 0x8000
/* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NOSTART 0x4000
/* if I2C_FUNC_NOSTART */
#define I2C_M_REV_DIR_ADDR 0x2000
/* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000
/* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK 0x0800
/* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_RECV_LEN 0x0400
/* length will be first received byte */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};(2) i2c_driver和i2c_client
i2c_driver对应一套驱动方法,其主要成员函数是probe()、remove()、suspend()、resume()等,另外,struct i2c_device_id形式的id_table是该驱动所支持的I2C设备的ID表。i2c_client对应于真是的物理设备,每个I2C设备都需要一个i2c_client来描述。i2c_driver与i2c_client的关系是一对多,一个i2c_driver可以支持多个类型的i2c_client。
i2c_client的信息通常在BSP的板文件中通过i2c_board_info填充,如下面的代码就定义了一个I2C设备的ID为“ad7142_joystick”、地址为0x2C、中断号为IRQ_PF5的i2c_client:
static struct i2c_board_info __initdata xxx_i2c_board_info[] = {
I2C_BOARD_INFO("ad7142_joystick", 0x2C),
.irq = IRQ_PF5,
}在I2C总线驱动i2c_bus_type的match()函数i2c_device_match()中,会调用i2c_match_id()函数匹配在板文件中定义的ID和i2c_driver所支持的ID表。
(3) i2c_adapter与i2c_client
i2c_adapter和i2c_client的关系与I2C硬件体系中适配器和设备的关系一致,即i2c_client依附于i2c_adapter。由于一个适配器可以连接多个I2C设备,所以一个i2c_adapter也可以被多个i2c_client依附,i2c_adapter中包括依附于它的i2c_client的链表。
虽然I2C硬件体系结构比较简单,但是I2C体系结构在Linux中的实现是相当复杂的。当工程师拿到实际的电路板时,面对复杂的Linux I2C子系统,应该如何下手写驱动呢?究竟有那些需要亲自做的,那些是内核已经提供的呢?理清这个问题非常有意义,可以使我们在面对具体问题时迅速抓住重点。
一方面,适配器驱动可能是Linux内核本身还不包含的;另一方面,挂接在适配器上的具体设备驱动可能也是Linux内核还不包含的。因此,工程师要实现的主要工作如下:
l 提供I2C适配器的硬件驱动,探测、初始化I2C适配器、驱动CPU控制的I2C适配器从硬件上产生各种信号以及处理I2C中断等。
l 提供I2C适配器的Algorithm,用具体适配器的xxx_xfer()函数填充i2c_algorithm的master_xfer指针,并把i2c_algorithm指针赋值给i2c_adapter的algo指针。
l 实现I2C设备驱动中的i2c _driver接口,用具体设备yyy的yyy_probe()、yyy_remove()、yyy_suspend()、yyy_resume()函数指针和i2c_device_id设备ID表赋值给i2c_driver的probe、remove、suspend、resume和id_table指针。
l 实现I2C设备所对应类型的具体驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则千差万别。例如,如果是字符设备,就实现文件操作接口,即实现具体设备yyy的yyy_read()、yyy_write()和yyy_ioctl()函数等;如果是声卡,就实现ALSA驱动。
Linux I2C核心:
I2C核心(kernel/drivers/i2c/i2c-core.c)提供了一组不依赖于硬件平台的接口函数,这个文件一般不需要被工程师修改,但是理解其中的主要函数非常关键,因为I2C总线驱动和设备驱动之间以I2C核心作为纽带。I2C核心中的主要函数如下。
(1) 增加/删除i2c_adapter
int i2c_add_adapter(struct i2c_adapter *adapter);
void i2c_del_adapter(struct i2c_adapter *adap);(2) 增加/删除i2c_driver
int i2c_register_driver(struct module *owner, struct i2c_driver *driver);
void i2c_del_driver(struct i2c_driver *driver);(3) 传输、发送和接收
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num);
int i2c_master_send(const struct i2c_client *client, const char *buf, int count);
int i2c_master_recv(const struct i2c_client *client, char *buf, int count);i2c_transfer()函数用于进行I2C适配器和I2C设备之间的一组消息交互,其中第2个参数是一个指向i2c_msg数组的指针,所以i2c _ transfer()一次可以传输多个i2c_msg(考虑到很多外设的读写波形比较复杂,比如读寄存器可能要先写,所以需要两个以上的消息)。而对于时序比较简单的外设,i2c_master_send()和i2c_master_recv()函数内部会调用i2c_transfer()函数分别完成一条写消息和一条读消息,如下代码清单所示。
I2C核心的i2c_master_send()函数:
/**
* i2c_master_send - issue a single I2C message in master transmit mode
* @client: Handle to slave device
* @buf: Data that will be written to the slave
* @count: How many bytes to write, must be less than 64k since msg.len is u16
*
* Returns negative errno, or else the number of bytes written.
*/
int i2c_master_send(const struct i2c_client *client, const char *buf, int count)
{
int ret;
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.len = count;
msg.buf = (char *)buf;
ret = i2c_transfer(adap, &msg, 1);
/*
* If everything went ok (i.e. 1 msg transmitted), return #bytes
* transmitted, else error code.
*/
return (ret == 1) ? count : ret;
}I2C核心的i2c_master_recv()函数:
/**
* i2c_master_recv - issue a single I2C message in master receive mode
* @client: Handle to slave device
* @buf: Where to store data read from slave
* @count: How many bytes to read, must be less than 64k since msg.len is u16
*
* Returns negative errno, or else the number of bytes read.
*/
int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
{
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
int ret;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.flags |= I2C_M_RD;
msg.len = count;
msg.buf = buf;
ret = i2c_transfer(adap, &msg, 1);
/*
* If everything went ok (i.e. 1 msg received), return #bytes received,
* else error code.
*/
return (ret == 1) ? count : ret;
}i2c_transfer()函数本身不具备驱动适配器物理硬件以完成消息交互的能力,它只是寻找到与i2c_adapter对应的i2c_algorithm,并使用i2c_algorithm的master_xfer()函数真正驱动硬件流程,代码清单如下所示。
I2C核心的i2c_transfer()函数:
/**
* i2c_transfer - execute a single or combined I2C message
* @adap: Handle to I2C bus
* @msgs: One or more messages to execute before STOP is issued to
* terminate the operation; each message begins with a START.
* @num: Number of messages to be executed.
*
* Returns negative errno, else the number of messages executed.
*
* Note that there is no requirement that each message be sent to
* the same slave address, although that is the most common model.
*/
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
{
int ret;
/* REVISIT the fault reporting model here is weak:
*
* - When we get an error after receiving N bytes from a slave,
* there is no way to report "N".
*
* - When we get a NAK after transmitting N bytes to a slave,
* there is no way to report "N" ... or to let the master
* continue executing the rest of this combined message, if
* that's the appropriate response.
*
* - When for example "num" is two and we successfully complete
* the first message but get an error part way through the
* second, it's unclear whether that should be reported as
* one (discarding status on the second message) or errno
* (discarding status on the first one).
*/
if (adap->algo->master_xfer) {
#ifdef DEBUG
for (ret = 0; ret < num; ret++) {
dev_dbg(&adap->dev, "master_xfer[%d] %c, addr=0x%02x, "
"len=%d%s\n", ret, (msgs[ret].flags & I2C_M_RD)
? 'R' : 'W', msgs[ret].addr, msgs[ret].len,
(msgs[ret].flags & I2C_M_RECV_LEN) ? "+" : "");
}
#endif
if (in_atomic() || irqs_disabled()) {
ret = i2c_trylock_adapter(adap);
if (!ret)
/* I2C activity is ongoing. */
return -EAGAIN;
} else {
i2c_lock_adapter(adap);
}
ret = __i2c_transfer(adap, msgs, num);
i2c_unlock_adapter(adap);
return ret;
} else {
dev_dbg(&adap->dev, "I2C level transfers not supported\n");
return -EOPNOTSUPP;
}
}Linux I2C设备驱动:
I2C设备驱动要使用i2c_driver和i2c_client数据结构并填充i2c_driver中的成员函数。i2c_client一般被包含在设备的私有信息结构体yyy_data中,而i2c_driver则适合被定义为全局变量并初始化,代码清单如下所示已被初始化的i2c_driver。
被初始化的i2c_driver:
static struct i2c_driver yyy_driver = {
.driver = {
.name = "yyy",
},
.probe = yyy_probe,
.remove = yyy_remove,
.id_table = yyy_id,
};Linux I2C设备驱动的模块加载和卸载:
I2C设备驱动的模块加载函数通过I2C核心的i2c_add_driver()API函数添加i2c_driver的工作,而模块卸载函数需要做相反的工作;通过I2C核心的i2c_del_driver()函数删除i2c_driver。代码清单如下所示为I2C设备驱动的模块加载和卸载函数模板。
static int __init yyy_init(void)
{
return i2c_add_driver(&yyy_driver);
}
module_init(yyy_init);
static void __exit yyy_exit(void)
{
i2c_del_driver(&yyy_driver);
}
module_exit(yyy_exit);Linux I2C设备驱动的数据传输:
在I2C设备上读写数据的时序且数据通常通过i2c_msg数组进行组织,最后通过i2c_transfer()函数完成,代码清单如下所示为一个读取指定偏移地址offs的寄存器。
I2C设备驱动的数据传输范例:
struct i2c_msg msg[2];
/* 第一条消息是写消息 */
msg[0].addr = client->addr;
msg[0].flags = 0;
msg[0].len = 1;
msg[0].buf = &offs;
/* 第二条消息是读消息 */
msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].len = sizeof(buf);
msg[1].buf = &buf[0];
i2c_transfer(client->adapter, msg, 2);此文完结!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









