



 本文介绍了如何在命令行中使用Python执行脚本文件的方法。首先创建了一个包含简单加法运算的Python脚本aa.py,然后通过在命令行中输入python-iaa.py来运行该脚本,并成功显示了计算结果。
本文介绍了如何在命令行中使用Python执行脚本文件的方法。首先创建了一个包含简单加法运算的Python脚本aa.py,然后通过在命令行中输入python-iaa.py来运行该脚本,并成功显示了计算结果。
今天学习的时候看见python -i filaname 这个命令,书上说使用这个命令可以去执行filename文件中的代码。但是今天在使用的时候却一直报错,经过多次测试才把问题解决。
原来这个命令是不能再pathon的ide下使用,是在控制台使用的。
1.首相我们在C:\Users\Administrator\Desktop\python建立aa.py这个文件,里面的内容为:
a =1
b =2
print('a+b= %d' % (a+b))
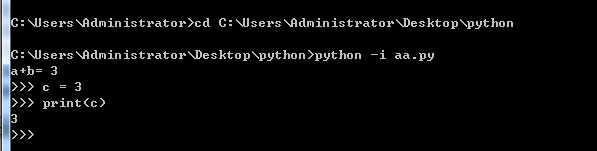
2.登录控制台,进入到aa.py的目录下(必须进入到文件的目录,不然系统找不到文件),输入python -i aa.py。界面就会输出结果。

3.这时我们已经进入到了python的编辑模式,我们可以继续执行python的命令:
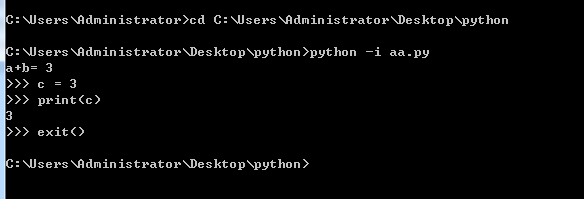
4.输入exit()退出python的编辑:

















 6911
6911

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









