



 团队正在开发图书管理系统,包括完善各个页面和进行架包编写。队员金安安、谢竟成和彭丽君分别负责book_manage.jsp、book_student.jsp和indexlogo.jsp页面,面临的主要问题是架包编写的优化。
团队正在开发图书管理系统,包括完善各个页面和进行架包编写。队员金安安、谢竟成和彭丽君分别负责book_manage.jsp、book_student.jsp和indexlogo.jsp页面,面临的主要问题是架包编写的优化。
团队的作业:图书管理系统
- 队员学号:
金安安(队长) 201810812003
谢竟成 201810812002
彭丽君 201810812010
Alpha敏捷冲刺:
1、站立式会议照片:
2、每个人的工作:
金安安:昨天已完成:完善book_manage.jsp页面,并进行com.mingsoft.dao的架包编写。
遇到的问题;架包编写的不是很好。
今天计划完成:进行com.mingsoft.dao的架包完善,并进行下一个任务。
谢竟成:昨天已完成:完成book_student.jsp页面的完善,并进行com.mingsoft.dao.impl的架包编写。
遇到的问题;架包编写的不是很好。
今天计划完成:进行com.mingsoft.dao.impl的架包完善,并进行下一个任务。
彭丽君:昨天已完成:完成indexlogo.jsp页面的完善,并进行com.mingsoft.model的架包编写。
遇到的问题;架包编写的不是很好
今天计划完成:进行com.mingsoft.model的架包完善,并进行下一个任务。
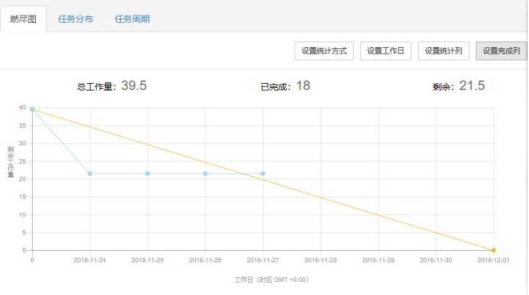
项目燃尽图连接地址:
https://www.leangoo.com/kanban/board/go/2556610#?tdsourcetag=s_pcqq_aiomsg
项目燃尽图:

















 90
90

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









