






镜头畸变的产生是由于透镜特性(凸透镜汇聚光线、凹透镜发散光线)在成像过程中对真实镜像的一种透视失真,在镜头的制造过程中,如果想要消除镜头畸变,需要从镜头的光学设计入手,选取高质量的光学玻璃来制造镜片,然而,这些手段并不能完全消除畸变,摄像机标定技术应运而生。本文引用地址:http://www.eepw.com.cn/article/201706/352360.htm
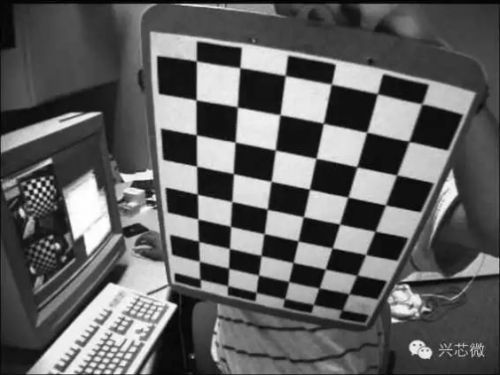
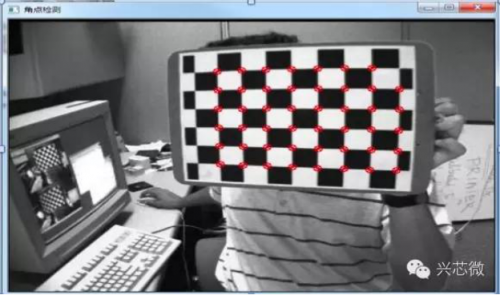
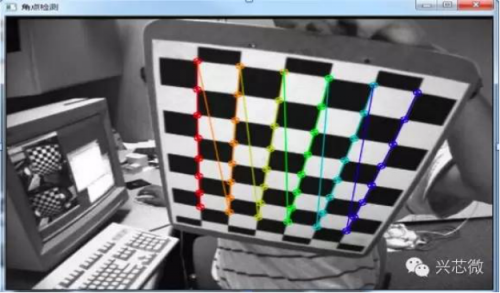
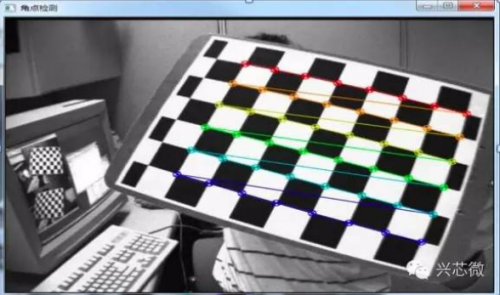
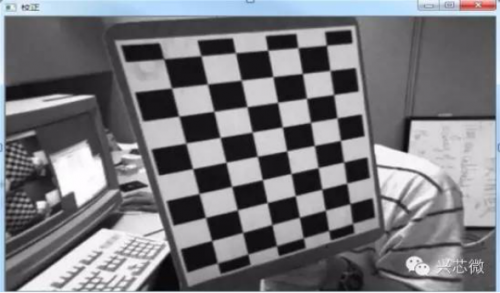
摄像机标定是通过建立摄像机成像的几何模型,确定空间物体表面的三维几何位置与其对应的图像中的点之间的关系,最终得到相机参数。摄像机标定方法分为传统摄像机标定、主动视觉摄像机标定和摄像机自标定三种方法。结合实际应用精度要求及操作复杂度等,目前最常用的畸变校正算法为模板法,其原理是:利用一个事先做好的模板(通常为黑白棋盘格),然后对模板进行拍摄,通过对拍摄前后提取的对应的特征点,根据事先建立的成像模型,通过数学方法对参数进行求解,再将求得的参数恢复没有畸变的源图像。
算法基本流程
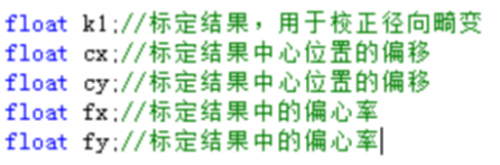
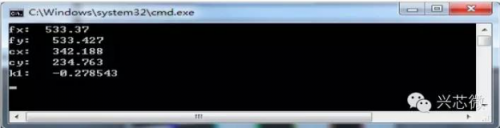
镜头标定:出厂前,通过自己编写的软件对每一个镜头进行标定,确定每个镜头的畸变参数。
校正:确定每个镜头的畸变系数,每次拍摄时通过硬件把图像或帧校正后再输出
畸变方程
根据小孔成像原理,建立成像方程:
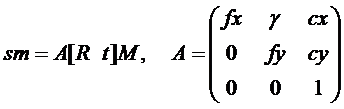
其中[R t]是成像过程中的旋转和平移的外参,A就是需要标定的相机畸变内参。
镜头标定
通过拍摄的若干张照片建立方程组,求参数最优解
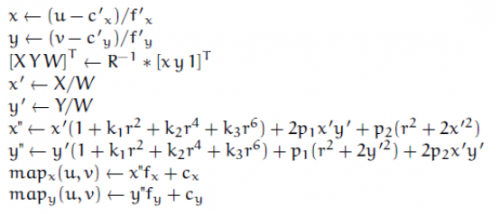
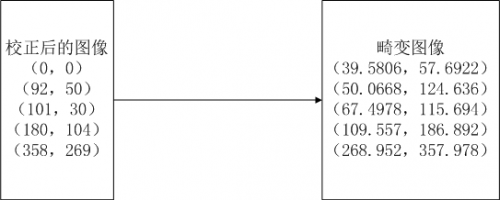
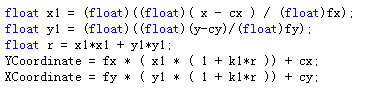
校正—坐标映射
标定过程就是通过镜头标定求得参数得到坐标间的映射关系。

校正—插值



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









