




 本文通过实验测试了L3G4200DTR三轴MEMS电子陀螺仪在静止和运动状态下的角度输出。静止时观察到明显的零漂误差,5分钟内积累达160度;运动测试中,虽然能捕捉到旋转变化,但依然存在误差。实验结果强调了MEMS电子陀螺仪的零漂和温度误差问题,提出动态校零和误差补偿的必要性。
本文通过实验测试了L3G4200DTR三轴MEMS电子陀螺仪在静止和运动状态下的角度输出。静止时观察到明显的零漂误差,5分钟内积累达160度;运动测试中,虽然能捕捉到旋转变化,但依然存在误差。实验结果强调了MEMS电子陀螺仪的零漂和温度误差问题,提出动态校零和误差补偿的必要性。
导航中经常用到电子陀螺。为了测试陀螺仪在静止下的零漂输出和运动情况下的输出角度值,做了2个实验。用的陀螺仪型号是:L3G4200DTR
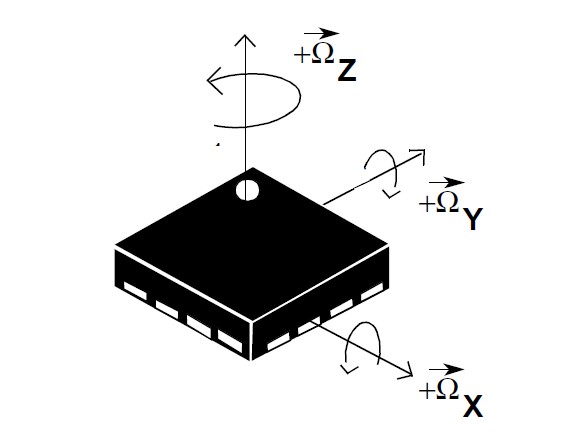
是一个三轴输出的MEMS电子陀螺。
1 零漂测试
让陀螺仪静止不动,运行5分钟,记录串口输出数据,并解析出三个轴的角速度值。在matlab里面进行仿真。
function main
clc;
clear;
dataFile = input('put file: ','s');
nCount = 0;
fileHandle = fopen(dataFile,'r');
while ~feof(fileHandle)
string = fgetl(fileHandle);
nCount = nCount + 1;
end
nCount = nCount-2;
frewind(fileHandle);
i = 1;
while ~feof(fileHandle)
string = str2num(fgetl(fileHandle));
zData(i) = string(3);
i = i + 1;
if i > nCount
break;
end
end
fclose(fileHandle);
figure(1);
plot(zData,'b-');
hold on;
meanZData = mean(zData);
title('原始Z轴输出数据');
xlabel('ms');
ylabel
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1153
1153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









