



调试找到的问题:
1:开始调试的时候因为之前的工程师原理图和BOM出错,导致本来是2.8V电压的焊接的是1.8V的LDO所以这个是第一个问题
2:因为FAE反应说sensor没有反应I2C没有通信,所以检查了原理图发现,I2C有读地址和写地址的选择
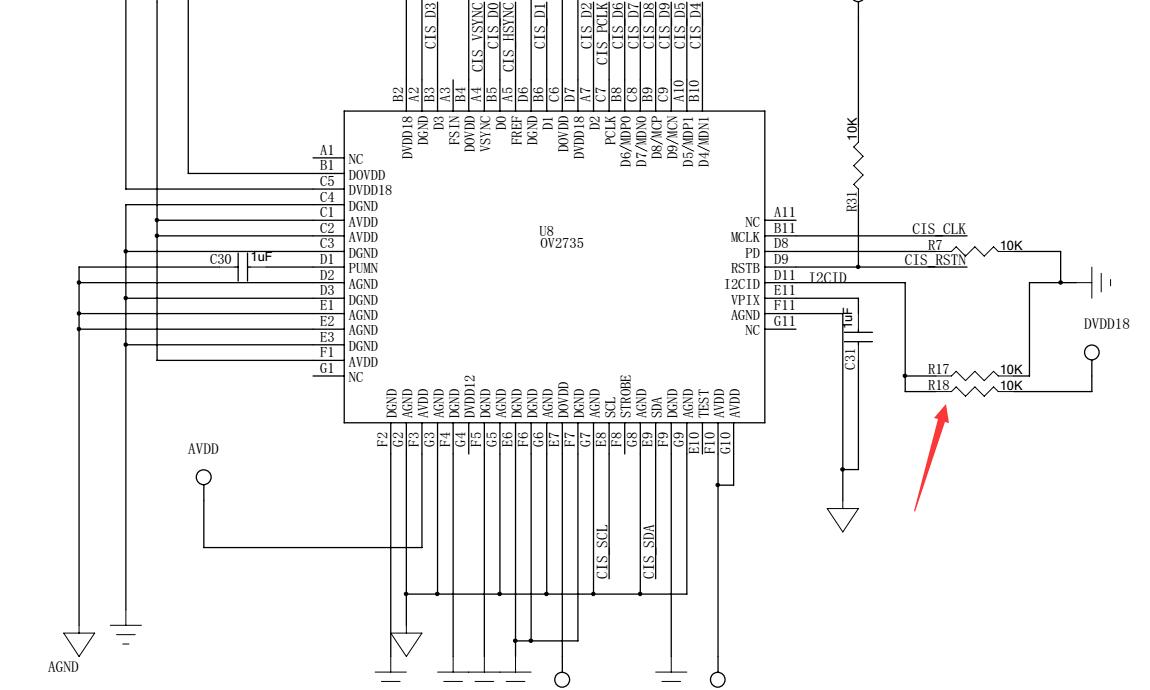
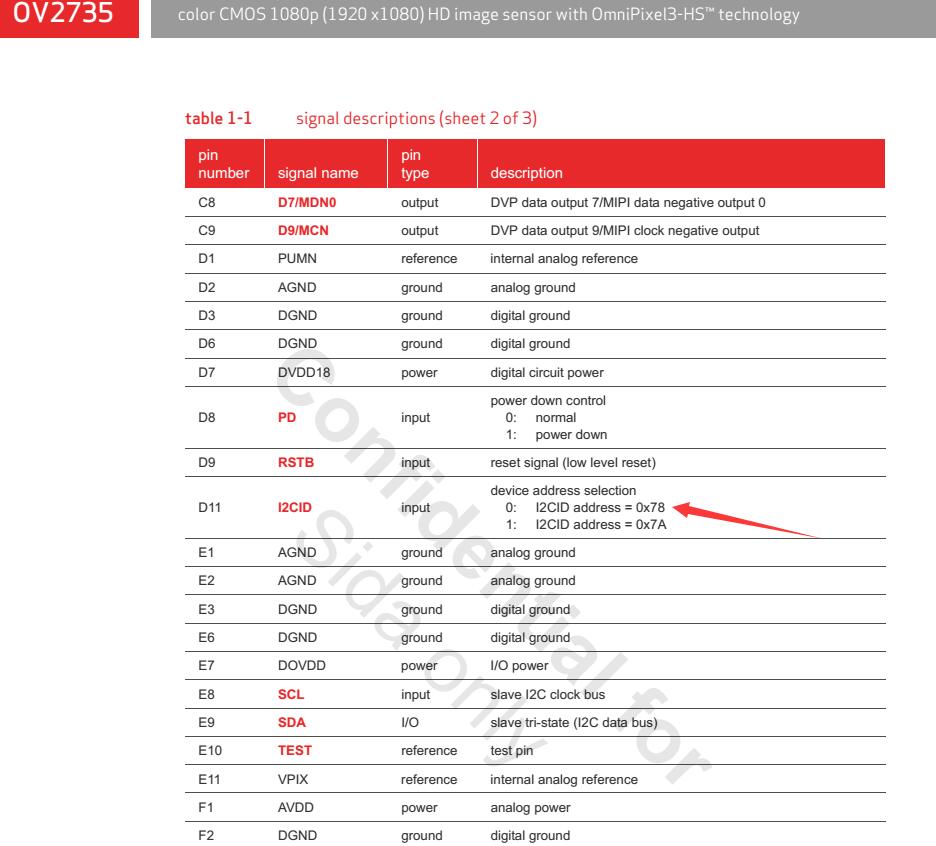
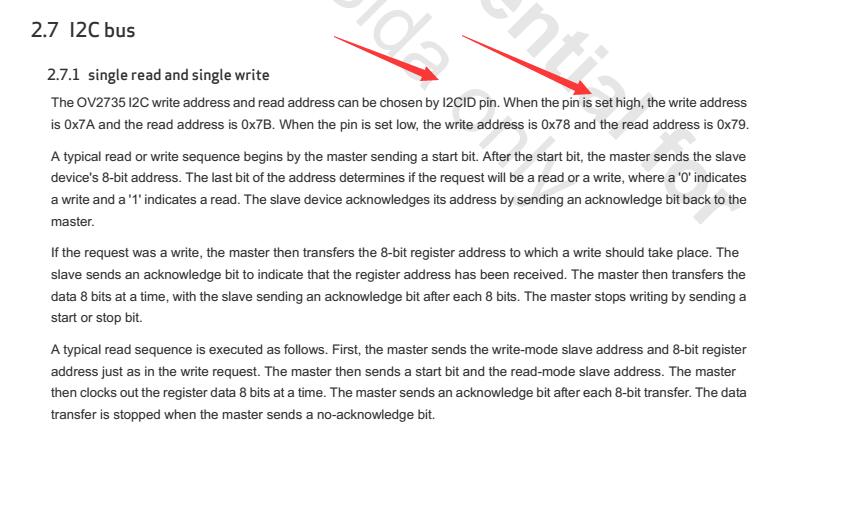
此处的R18是多余的,直接接R17下拉即可。至低电位,所以写地址是0x78,读地址是0X79,之后软件修改了程序但是还是不出图像。
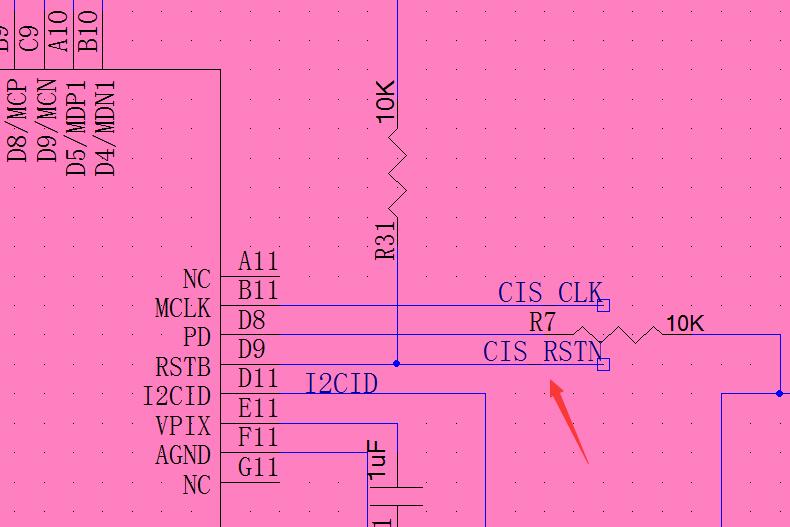
3:检查对比方案商的OK图纸发现D9-RSTB接线错误,应该是接0.1UF的电容到地
修改之后依然是没有出图
4:继续测量sensor0V2735的C7-PCLK,B11-CIS MCLK,帧同步信号CIS-VSYNC和行同步信号HSYNC信号以及DATA数据线上的信号,发现都有信号输出,所以判断是sensor或者主控的寄存器配置问题
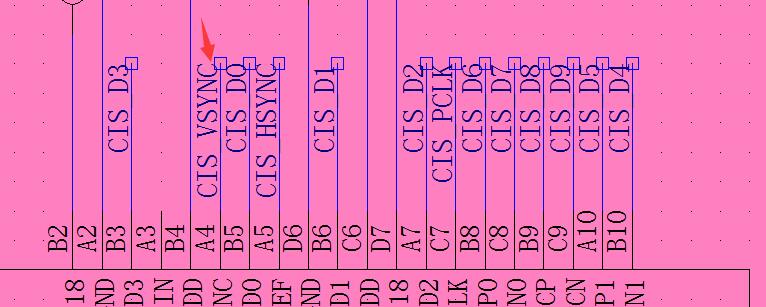
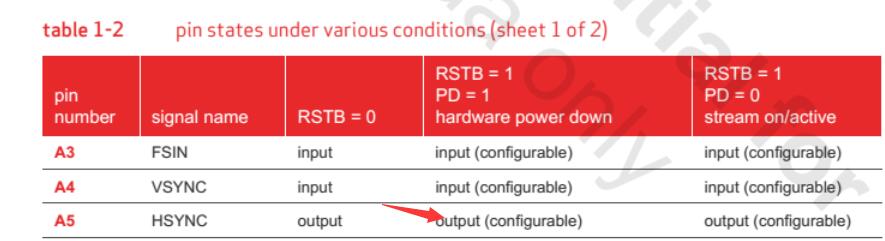
同时注意HSYNC是输出端口,若主控没有工作则没有输出。测量之后发现确实没有信号,判断应该是主控工作不正常(有时钟PCLK,MCLK,D数据,说明主控和sensor通信了,但是没有出图像应该还是某个寄存器配置的问题)。另外还要注意A3信号FSIN是帧同步信号,此处是否为悬空?待明天验证。
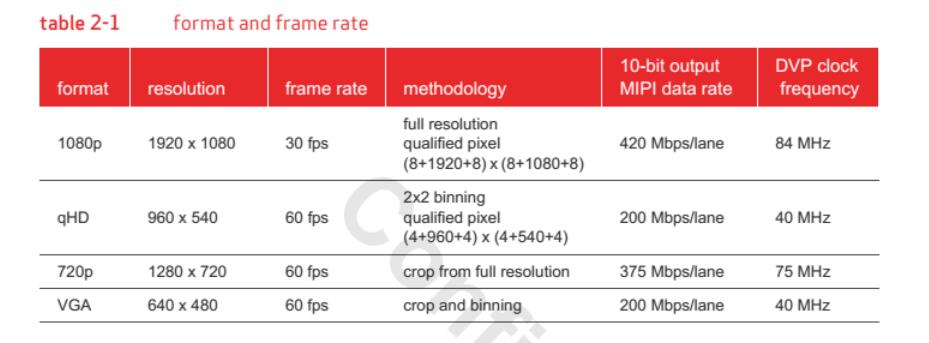
目前测试PCLK有74M的时钟,那么说明sensor发出的为1290x720P60的分辨率配置,说明sensor配置成功。
明天将继续配合软件来调试。
今天继续调试了这块样板,依然是主控无法输出,之后换掉主控IC之后工作正常。
经过测试其他几块样板也能出图,因此程序也么有问题,只是刚好只测试了之前那块有问题的。
以后遇到sensor有工作MCLK,PCLK,V,H信号正常的情况下但是主控没有输出的情况可以判断是主控的问题。

















 1529
1529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









