



 本文介绍了一种算法,用于寻找整数数组中具有最大和的子数组,以及判断给定方阵是否为上三角矩阵的方法。通过具体实例展示了算法的实现过程,包括读写文件操作。
本文介绍了一种算法,用于寻找整数数组中具有最大和的子数组,以及判断给定方阵是否为上三角矩阵的方法。通过具体实例展示了算法的实现过程,包括读写文件操作。
基础作业
本周请大家完成上周挑战作业的第一部分:给定一个整数数组(包含正负数),找到一个具有最大和的子数组,返回其最大的子数组的和。
例如:[1, -2, 3, 10, -4, 7, 2, -5]的最大子数组为[3, 10, -4, 7, 2]
输入:
请建立以自己英文名字命名的txt文件,并输入数组元素数值,元素值之间用逗号分隔。
输出
在不删除原有文件内容的情况下,将最大子数组以及子数组的和写入文件。
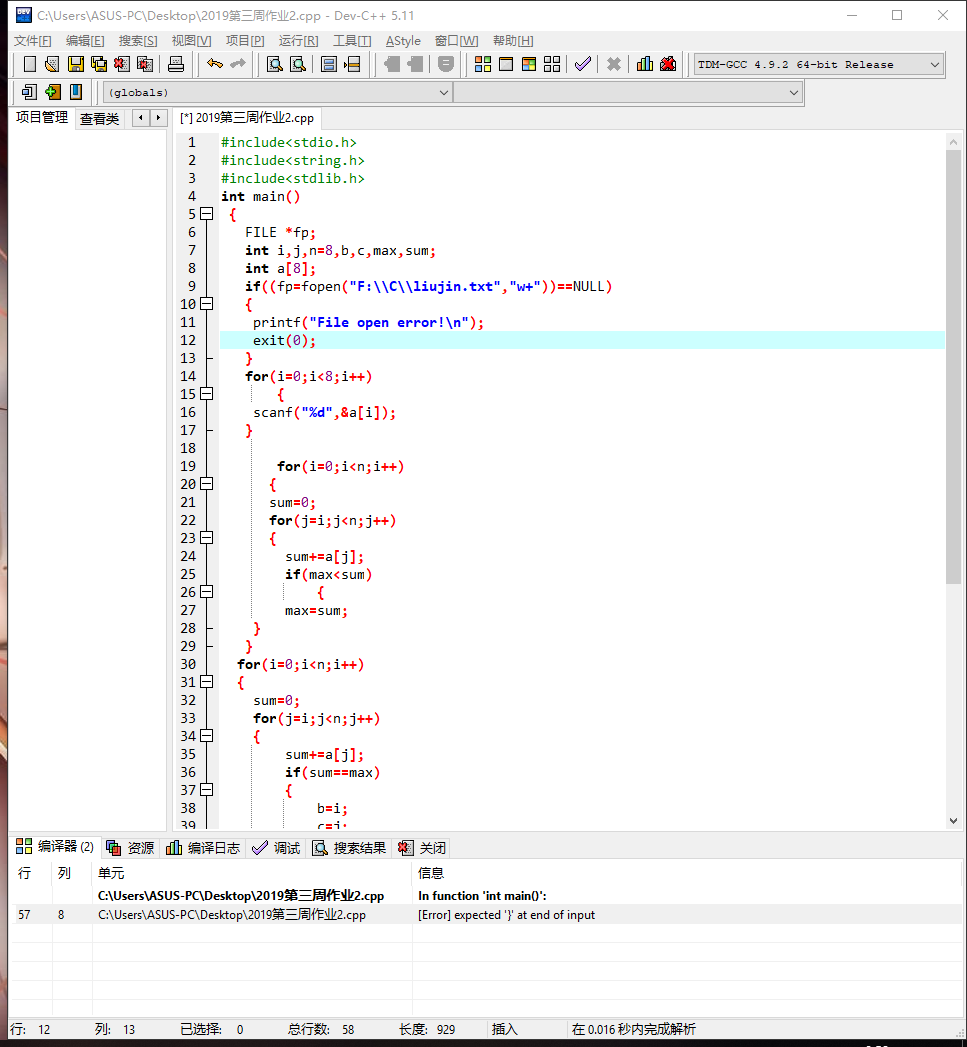
实验代码
#include<stdio.h>
#include<string.h>
#include<stdlib.h>
int main()
{
FILE *fp;
int i,j,n=8,b,c,max,sum;
int a[8];
if((fp=fopen("F:\\C\\liujin.txt","w+"))==NULL)
{
printf("File open error!\n");
exit(0);
}
for(i=0;i<8;i++)
{
scanf("%d",&a[i]);
}
for(i=0;i<n;i++)
{
sum=0;
for(j=i;j<n;j++)
{
sum+=a[j];
if(max<sum)
{
max=sum;
}
}
for(i=0;i<n;i++)
{
sum=0;
for(j=i;j<n;j++)
{
sum+=a[j];
if(sum==max)
{
b=i;
c=j;
break;
}
}
}
for(i=b;i<=c;i++)
{
fprintf(fp,"%d ",a[i]);
printf("%d ",a[i]);
}
fprintf(fp,"\n%d",max);
printf("\n%d",max);
if(fclose(fp))
{
printf("Can not close the file!\n");
exit(0);
}
return 0;
}
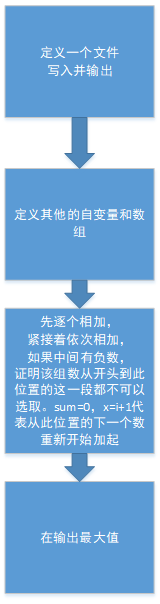
}流程框图
运行结果图
判断上三角矩阵
上三角矩阵指主对角线以下的元素都为0的矩阵;主对角线为从矩阵的左上角至右下角的连线。
本题要求编写程序,判断一个给定的方阵是否上三角矩阵。
输入格式:
输入第一行给出一个正整数T,为待测矩阵的个数。接下来给出T个矩阵的信息:每个矩阵信息的第一行给出一个不超过10的正整数n。随后n行,每行给出n个整数,其间以空格分隔。
输出格式:
每个矩阵的判断结果占一行。如果输入的矩阵是上三角矩阵,输出“YES”,否则输出“NO”。
输入样例:
2
3
1 2 3
0 4 5
0 0 6
2
1 0
-8 2输出样例:
YES
NO实验代码
#include <stdio.h>
int main() {
int t,n,i,j,k;
int a[10][10];
scanf("%d",&t);
int count=0;
int b[100]={0};
for(k=0; k<t; k++){
scanf("%d",&n);
for(i=0; i<n; i++){
for(j=0; j<n; j++){
scanf("%d",&a[i][j]);
}
}
for(i=0; i<n; i++){
for(j=0; j<n; j++){
if(i>j && a[i][j] != 0){
count++;
}
}
}
if(count==0 ){
b[k] = 1;
}else{
b[k] = 0;
}
count=0;
}
for(k=0; k<t; k++){
if(b[k]==1){
printf("YES\n");
}else{
printf("NO\n");
}
}
return 0;
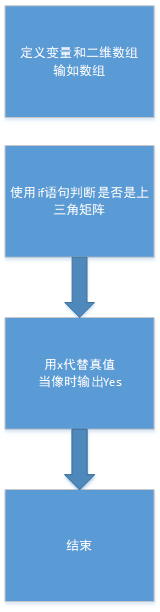
}流程框图
PTA运行结果图

周学习总结
一 文件的运用
二 学习/作业过程中遇到的问题及解决过程
问题一:文件的读和写
问题一的解决办法:r代表读但文件的数据会被更改,写是w可以把数据写入文件中。
三 预习内容总结
运用文件
以及如何定义一个文件和读取。
本周学习进度条
| 周/日 | 这周所花时间 | 代码行 | 学到的知识点 |
|---|---|---|---|
| 3/10-3/16 | 十小时 | 200行 | 文件的读与写 |

















 1805
1805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









