



 本文讲述了作者作为一名房产中介在北京的工作日常及内心感悟。包括了与客户交流的经验、个人成长的反思以及对未来生活的憧憬。
本文讲述了作者作为一名房产中介在北京的工作日常及内心感悟。包括了与客户交流的经验、个人成长的反思以及对未来生活的憧憬。
“拼搏到无能为力,坚持到感动自己”,今天刚刚改的微信个性签名,答辩回北京十天了,十天的时间真的是觉得经历了很多,工作,爱情,友谊好像都发生了某些变化,本以为这次回来会是美好的开始,下定决心留在北京好好努力的心突然又开始动荡了,早上开晨会的时候,听着经理那些激励人心的话,心里还是很不服气,没有卖过一套大房子,觉得还是有点遗憾,心理一直不服气,不服气的是一样的年龄,别人都住在大房子里面,开着几十万的车子,我在想为什么?凭什么?
早上开完晨会,替客户去看了金隅景和园的一个三居室,90平 ,报价450万,房子是小区最里面的楼栋8号楼,单元是2单元,楼层20层,房子是租户在住,一家三口,进门看房的时候,孩子大周末的要去舞蹈班学习,家里的老人负责做饭,收拾卫生,父母陪同孩子上辅导班,三代之家,其乐融融,甚是幸福,想着自己什么时候可以带着自己的父母,遇到一个能陪伴我一生的那个人,有一个两个可爱的孩子呢?拍完视频跟随着一个同事下的楼,一路上听着同事跟客户的谈话,谈论着税费以及购房流程的问题,每个人身上都有着自己所需要学习的地方,突然觉得好像外貌并没有自己认为的那么重要,只要有一颗能为客户着想的心,把客户所想的事情所犹豫的东西了解并为客户找到解决的办法,我想这大概就算是成功了吧?
从金隅景和园出门打算回店面,骑着自行车在路上,突然想四处转转,穿过奥道,突然想去自己还是新人跑盘的时候,看到的一个早市,就像自己家乡的集市,卖着那些新鲜又便宜的新鲜水果蔬菜,很是热闹,在这个地方感觉不像是在北京,感觉是在家一样,突然有种想回家的念头,想回到小时候,跟在我妈的屁股后面帮着她拎着菜跟水果,手指被勒出红印的感觉涌上了心头,逛完市场又在会店面的路上发现了一条小路,就想着去尝试一下,很安静的路,也很宽敞,骑着自行车就好想把双手张开,可惜没有那么高的车技,看着时间还早,就又骑着自行车去了还在建的坝河休闲公园,公园还不小,看到了恒大别墅门口的花,说不上来是什么名字,但是自己真的挺喜欢那种跟蝴蝶似的花朵,从公园回来的路上又萌发了一个想法,想买个好看的本子,随身携带好记录自己这一路走来的收获与感受。
中午跟着室友吃的泡面,好久都没有吃泡面了,买了自己想吃的火鸡面,买了火腿,室友买了其他的泡面说是不能吃辣,我们煮的泡面,煮鸡蛋,火腿肠,这个是上学时候一直向往的午餐,上班之后好像顿顿都是这样,想自己煮饭炒菜好像都没有时间来做,跟室友的关系好像回到了当初,却又好像怎么都回不到当初一样,两个人住一起,我一直认为相互嫌弃很正常,因为每个人的生活习惯不同,但是大家都是北漂过来,两个人能住在一起,相互照应也是一种缘分,那件事情过后,我再也没有把自己变得像一张白纸一样了,对她变得敬人三分了,因为我觉得掏心掏肺的,并不会换来别人的掏心掏肺,这个时候我的心里开始学会了装事情,因为不知道心里话该向谁表达,谁又能对我的事情守口如瓶,为我着想呢?
刚做好饭,师父的微信就发过来让我帮助她带看,本想着可以睡会午觉,又打水漂了,吃过饭,什么都没有收拾就回了店面,打印了房源纸,准备好了鞋套,记录了物业地址,师父一个电话说客户提前到了,准备打车去小区,谁知道怎么滴滴那么紧张,还需要排队,只能骑着自行车过去了,到了小区门口给客户打电话,客户在朝阳新城四区,在去看房的路上被客户询问房子长时间卖不出的原因,我如实告知了,客户比较介意怎么都不去看房,推荐其他的房子,客户觉得房价太高超过了自己的预算,却怎么也不去看,正在这个时候,师父来了,她推荐的房子客户已经跟双桥的同事约好时间了,客户来了,一套房子都没有看成,回去的路上被师父批评了,说是先看房再说原因,通过这件事,也学到了不少的知识。
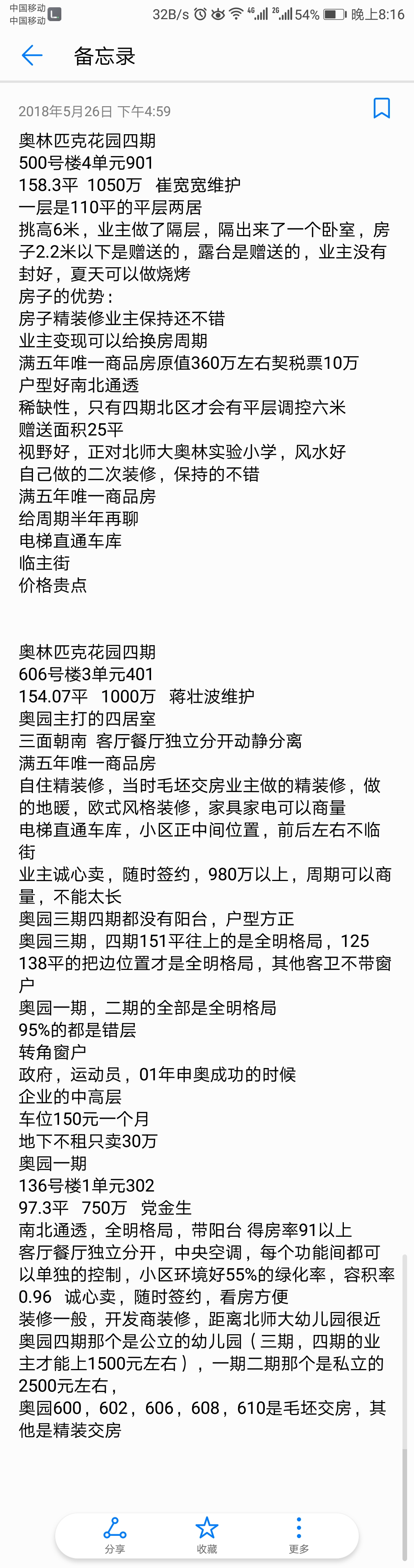
下午跟同事约好开发,没有任何的效果,分开之后,我去了奥林匹克花园四期店面,跟同事聊聊天,学习了点知识,看了两个房子,知道了小区的一些情况,
今天一天的收获大概就是这些吧,我想让自己变得优秀起来,只是不知道这样的努力我又能坚持多久,我想拼搏到无能为力,变得优秀起来,遇到那个人。

















 299
299

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









