



9.2.4.1 基本数学原理
如果某非线性规划的目标函数为自变量的二次函数,约束条件全是线性函数,就称这种规划为二次规划。其数学模型为: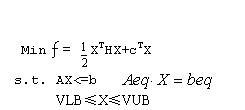
其中,H, A,和Aeq为矩阵,f, b, beq, lb, ub,和x为向量。
9.2.4.2 相关函数介绍
quadprog函数
功能:求解二次规划问题。
语法:
x = quadprog(H,f,A,b)
x = quadprog(H,f,A,b,Aeq,beq)
x = quadprog(H,f,A,b,Aeq,beq,lb,ub)
x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0)
x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)
[x,fval] = quadprog(...)
[x,fval,exitflag] = quadprog(...)
[x,fval,exitflag,output] = quadprog(...)
[x,fval,exitflag,output,lambda] = quadprog(...)
描述:
x = quadprog(H,f,A,b) 返回向量x,最小化函数 1/2*x'*H*x + f'*x ,其约束条件为 A*x <= b。
x = quadprog(H,f,A,b,Aeq,beq)仍然求解上面的问题,但添加了等式约束条件Aeq*x = beq。
x = quadprog(H,f,A,b,lb,ub)定义设计变量的下界lb和上界ub,使得lb <= x <= ub。
x = quadprog(H,f,A,b,lb,ub,x0)同上,并设置初值x0。
x = quadprog(H,f,A,b,lb,ub,x0,options)根据options参数指定的优化参数进行最小化。
[x,fval] = quadprog(...)返回解x处的目标函数值fval = 0.5*x'*H*x + f'*x。
[x,fval,exitflag] = quadprog(...)返回exitflag参数,描述计算的退出条件。
[x,fval,exitflag,output] = quadprog(...)返回包含优化信息的结构输出output。
[x,fval,exitflag,output,lambda] = quadprog(...)返回解x处包含拉格朗日乘子的lambda参数。
变量:
各变量的意义同前。
注意:
1. 一般地,如果问题不是严格凸性的,用quadprog函数得到的可能是局部最优解。
2. 如果用Aeq和Beq明确地指定等式约束,而不是用lb和ub指定,则可以得到更好的数值解。
3. 若x的组分没有上限或下限,则quadprog函数希望将对应的组分设置为Inf(对于上限)或-Inf(对于下限),而不是强制性地给予上限一个很大的数或给予下限一个很小的负数。
4. 对于大型优化问题,若没有提供初值x0,或x0不是严格可行,则quadprog函数会选择一个新的初始可行点。
5. 若为等式约束,且quadprog函数发现负曲度(negative curvature),则优化过程终止,exitflag的值等于-1。
算法:
大型优化算法 当优化问题只有上界和下界,而没有线性不等式或等式约束,则缺省算法为大型算法。或者,如果优化问题中只有线性等式,而没有上界和下界或线性不等式时,缺省算法也是大型算法。
本法是基于内部映射牛顿法(interior-reflective Newton method)的子空间置信域法(subspace trust-region)。该法的具体算法请参见文献[2]。该法的每一次迭代都与用PCG法求解大型线性系统得到的近似解有关。
中型优化算法 quadprog函数使用活动集法,它也是一种投影法,首先通过求解线性规划问题来获得初始可行解。
诊断:
1. 大型优化问题 大型优化问题不允许约束上限和下限相等,如若lb(2)==ub(2),则给出以下出错信息:
Equal upper and lower bounds not permitted in this large-scale method.Use equality constraints and the medium-scale method instead.
若优化模型中只有等式约束,仍然可以使用大型算法;如果模型中既有等式约束又有边界约束,则必须使用中型方法。
2.中型优化问题 当解不可行时,quadprog函数给出以下警告:
Warning: The constraints are overly stringent;there is no feasible solution.
这里,quadprog函数生成使约束矛盾最坏程度最小的结果。
当等式约束不连续时,给出下面的警告信息:
Warning: The equality constraints are overly stringent;there is no feasible solution.
当Hessian矩阵为负半定时,生成无边界解,给出下面的警告信息:
Warning: The solution is unbounded and at infinity;the constraints are not restrictive enough.
这里,quadprog函数返回满足约束条件的x值。
局限性:
1. 此时,显示水平只能选择'off'和'final',迭代参数'iter'不可用。
2.当问题不定或负定时,常常无解(此时exitflag参数给出一个负值,表示优化过程不收敛)。若正定解存在,则quadprog函数可能只给出局部极小值,因为问题可能时非凸的。
3.对于大型问题,不能依靠线性等式,因为Aeq必须是行满秩的,即Aeq的行数必须不多于列数。若不满足要求,必须调用中型算法进行计算。
9.2.4.3 应用实例
[例一] 求解下面的最优化问题:
目标函数
约束条件
首先,目标函数可以写成下面的矩阵形式:
其中
输入下列系数矩阵:
H = [1 -1; -1 2]
f = [-2; -6]
A = [1 1; -1 2; 2 1]
b = [2; 2; 3]
lb = zeros(2,1)
然后调用二次规划函数quadratic:
[x,fval,exitflag,output,lambda] = quadprog(H,f,A,b,[],[],lb)
得问题的解
x =
0.6667
1.3333
fval =
-8.2222
exitflag =
1
output =
iterations: 3
algorithm: 'medium-scale: active-set'
firstorderopt: []
cgiterations: []
lambda.ineqlin
ans =
3.1111
0.4444
0
lambda.lower
ans =
0
0
磁盘中本问题的M文件为opt24_1.m。

















 1109
1109

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









