






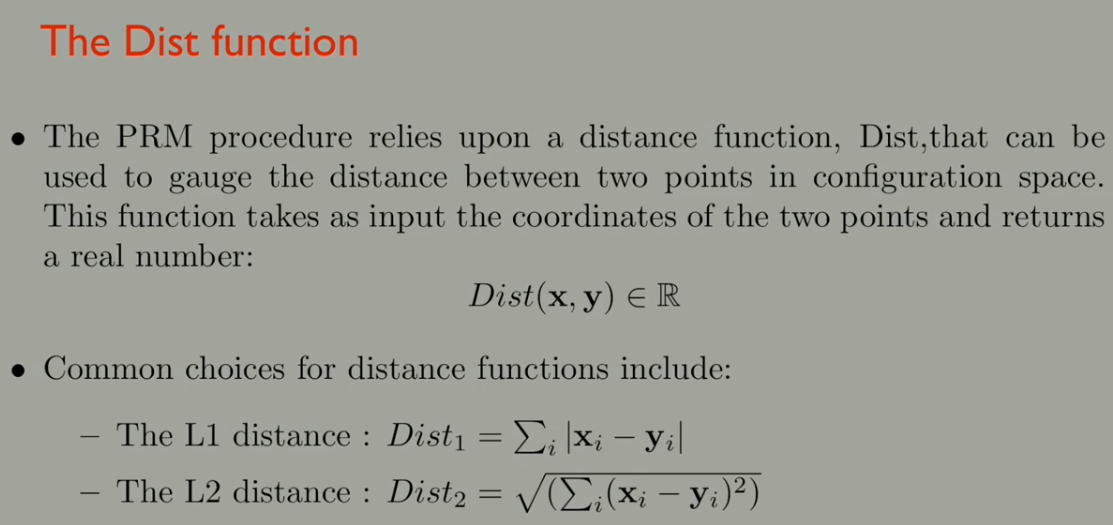
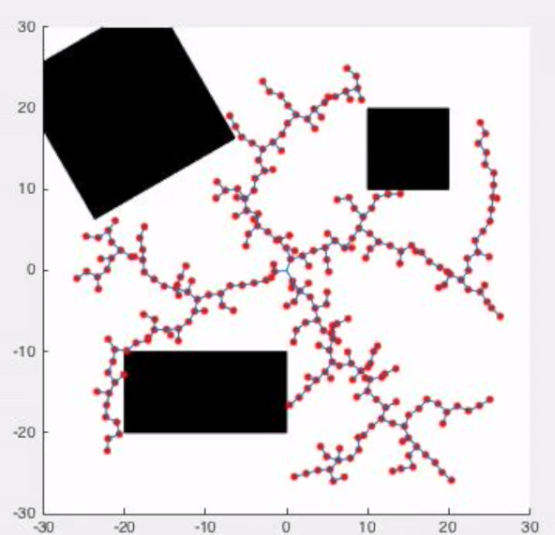
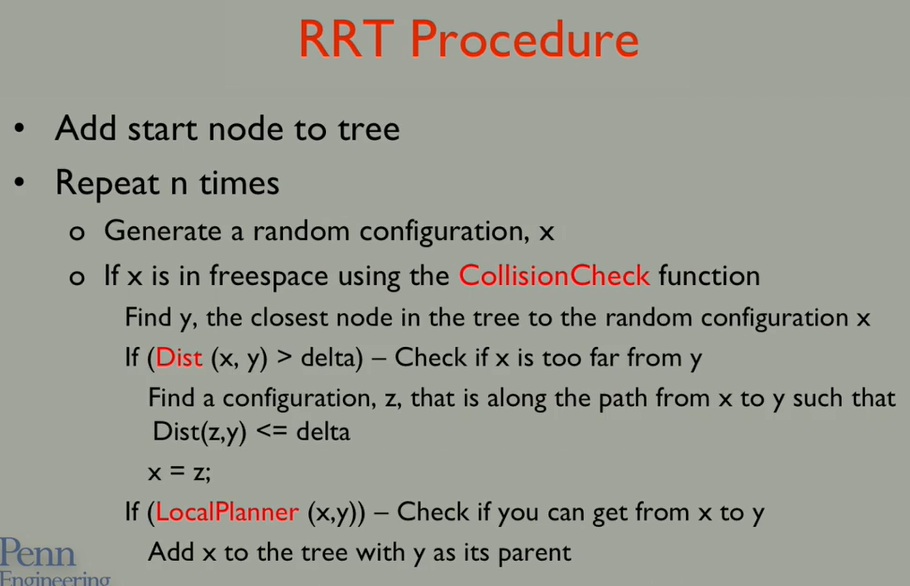
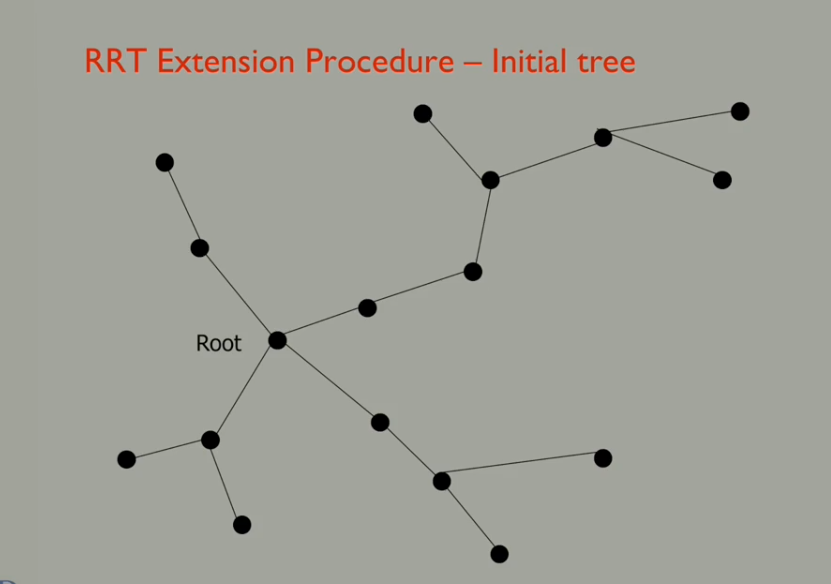
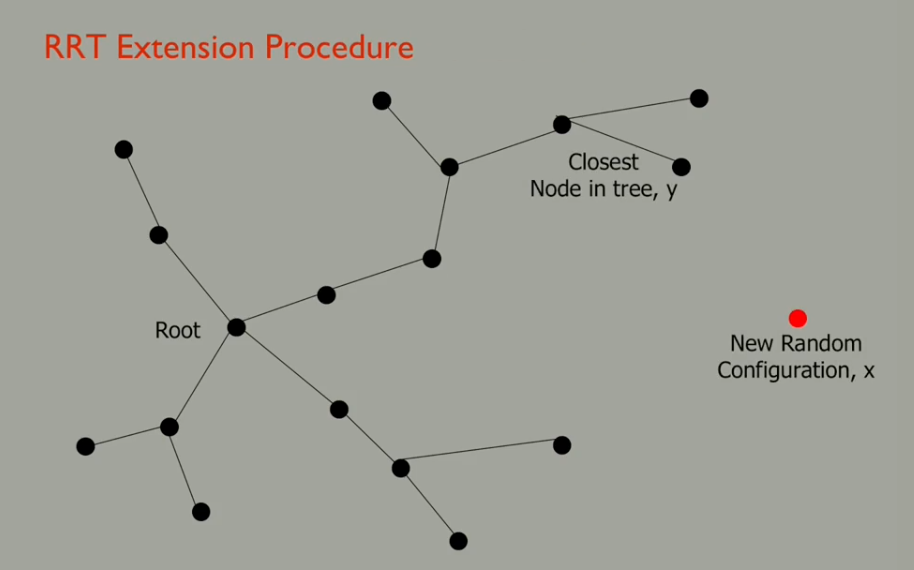
 本文深入探讨了路径规划算法中两种主流方法:概率路线图(PRM)与快速探索随机树(RRT)。PRM虽然在生成地图方面适用于多个任务,但效率低下,尤其在搜索整个自由空间时。相比之下,RRT在动态约束环境下表现更佳,如汽车机器人等系统。通过实例讲解,文章展示了RRT如何逐步构建路径,最终成功连接起始与目标节点。
本文深入探讨了路径规划算法中两种主流方法:概率路线图(PRM)与快速探索随机树(RRT)。PRM虽然在生成地图方面适用于多个任务,但效率低下,尤其在搜索整个自由空间时。相比之下,RRT在动态约束环境下表现更佳,如汽车机器人等系统。通过实例讲解,文章展示了RRT如何逐步构建路径,最终成功连接起始与目标节点。
https://blog.youkuaiyun.com/DinnerHowe/article/details/80267062
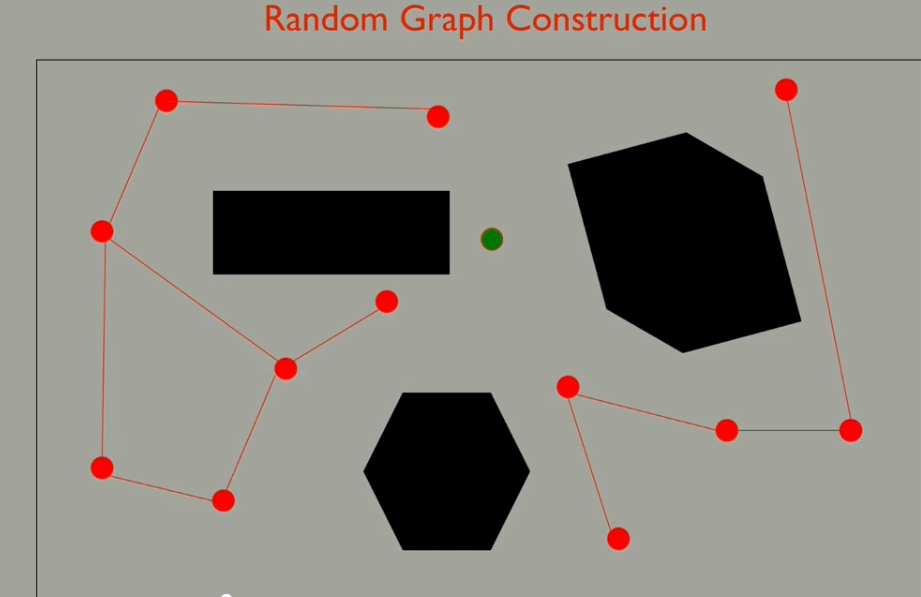
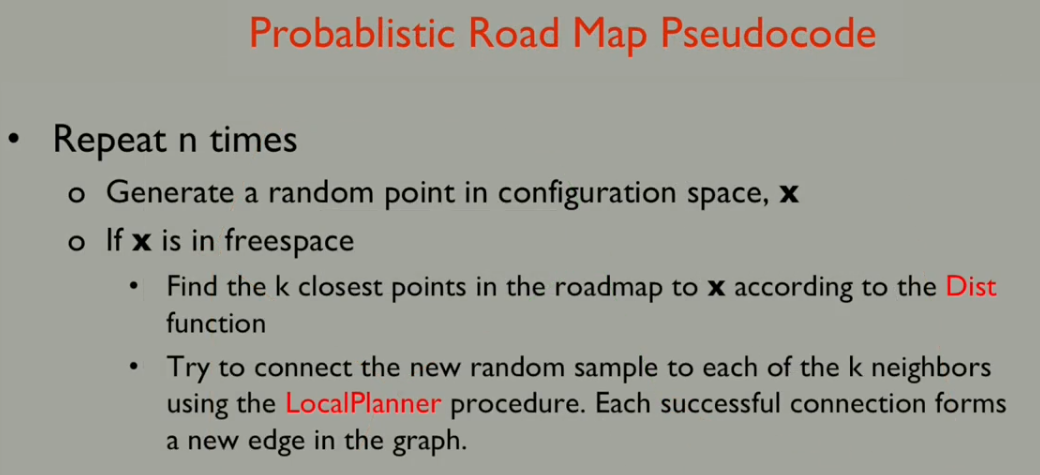
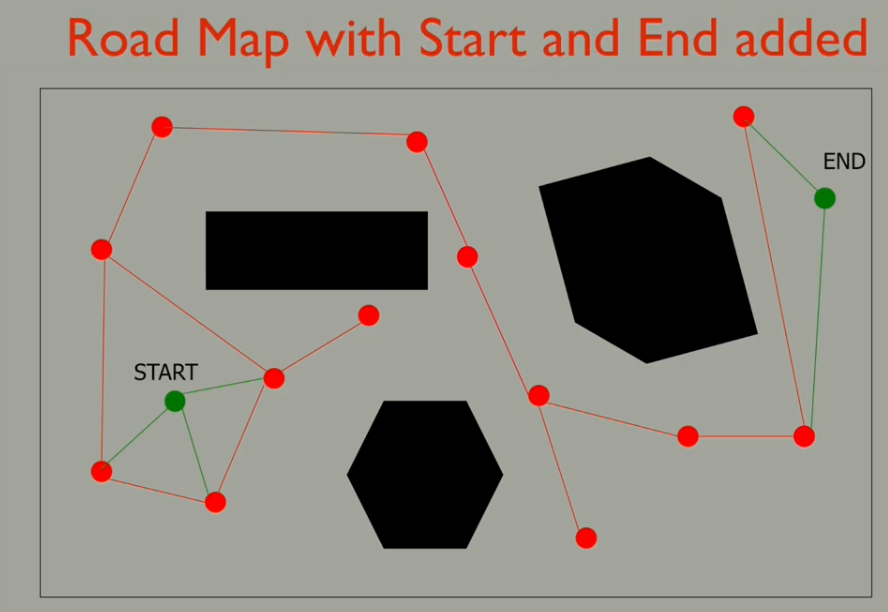
1, initialize by random sampling
PRM is not Not complete
Edge case:
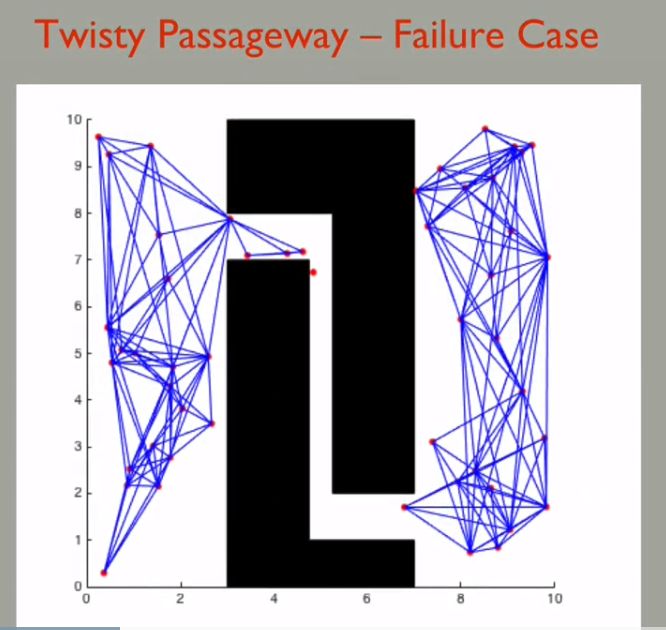
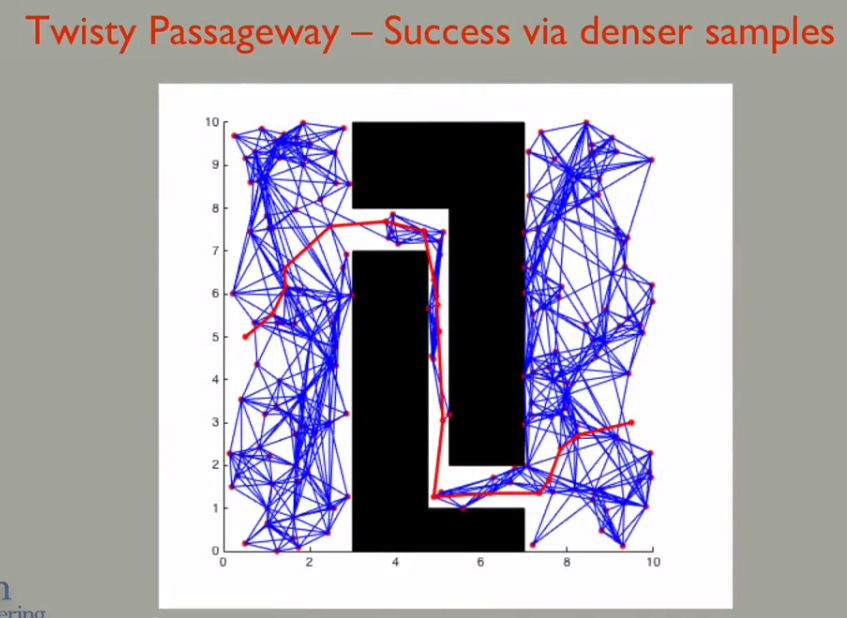 only probably complete, one stratety is to generate more samples between closed barriers.
only probably complete, one stratety is to generate more samples between closed barriers.
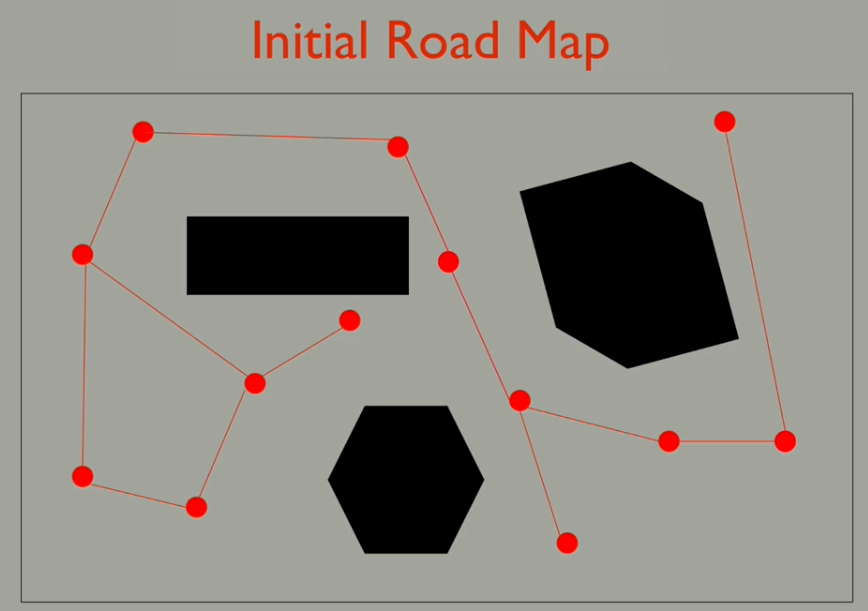
(PRM buiding the map, whcih can be used in multiple tasks, but it's not efficient when only have to solve one problem and search the entire free space)
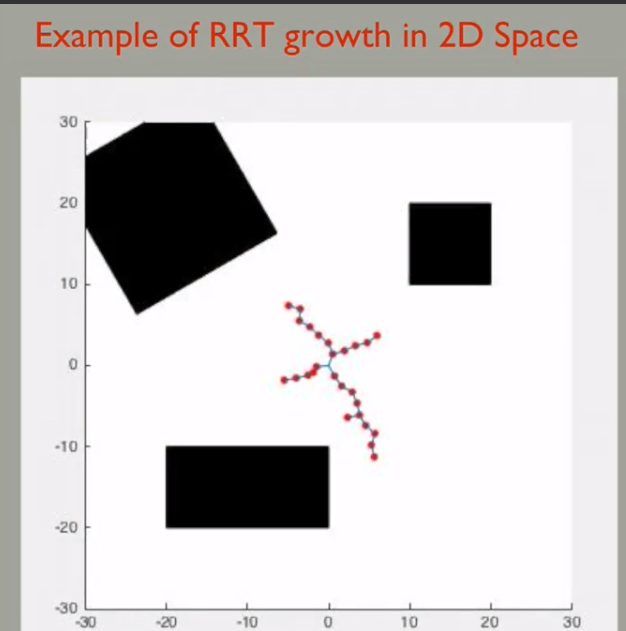
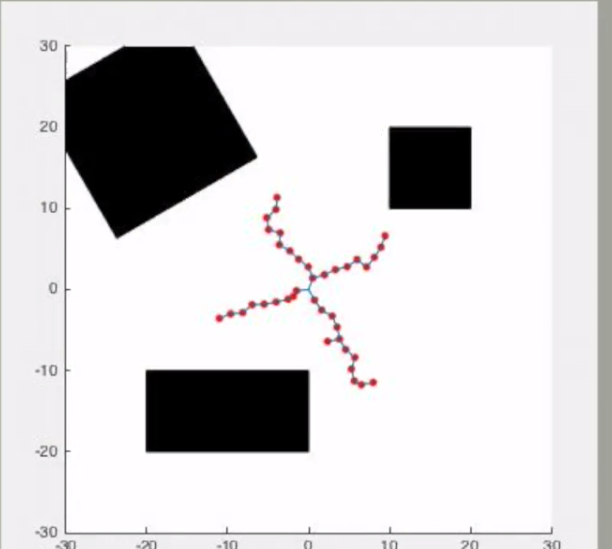
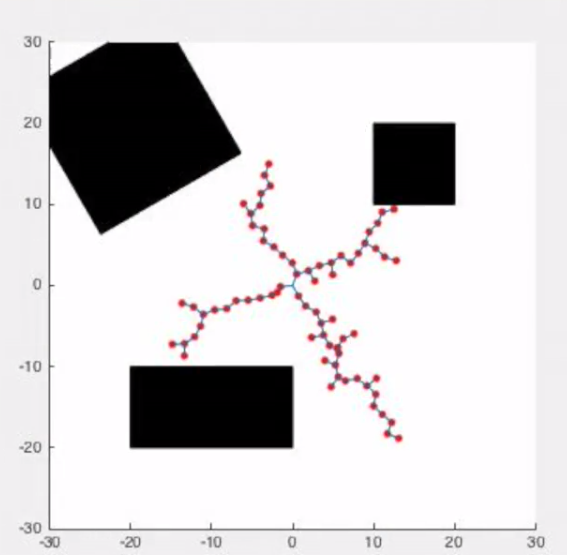
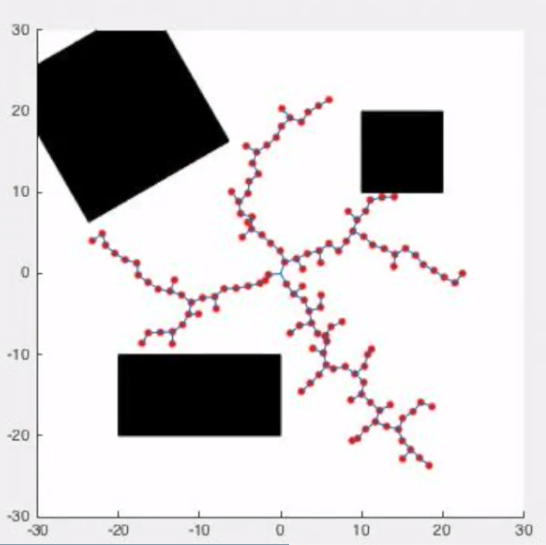
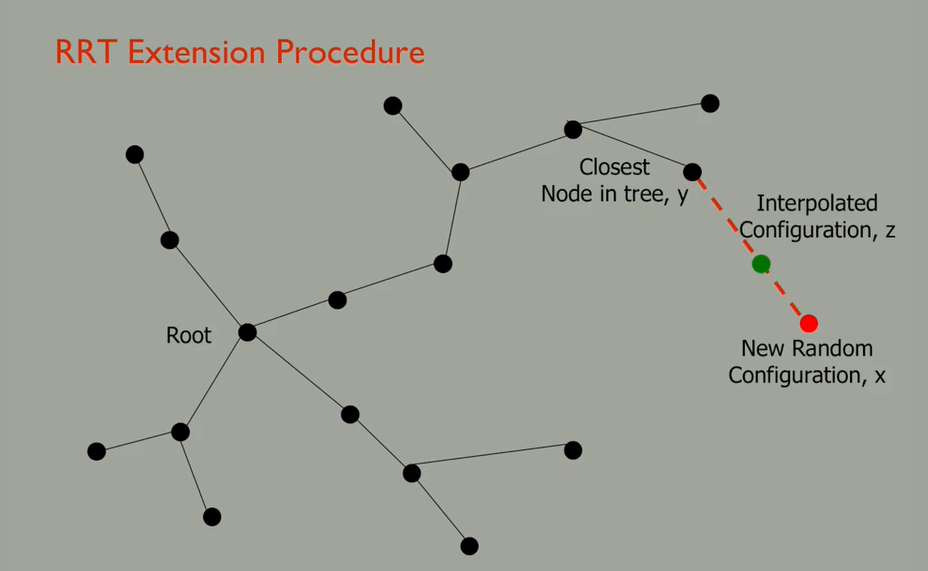
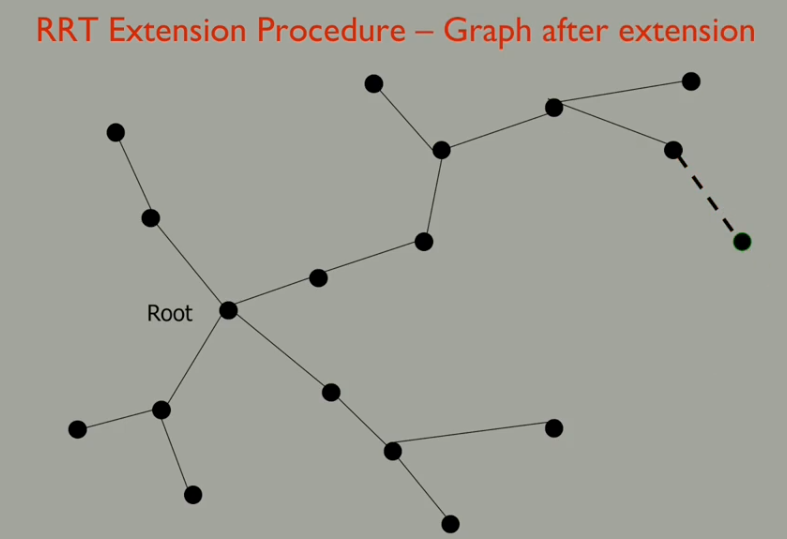
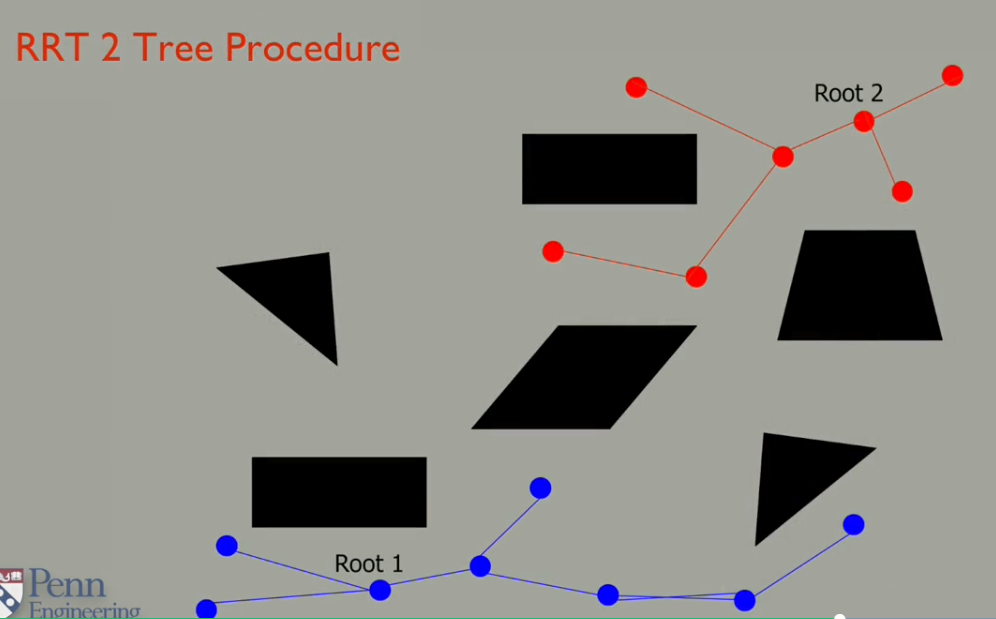
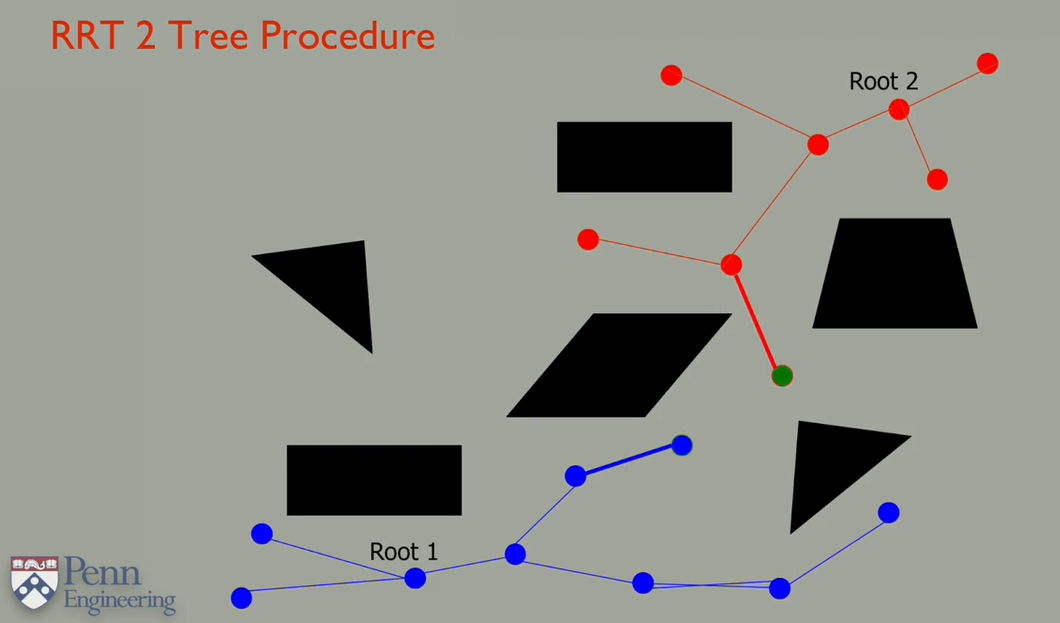
Rapid Exploring Random Trees (RRT)

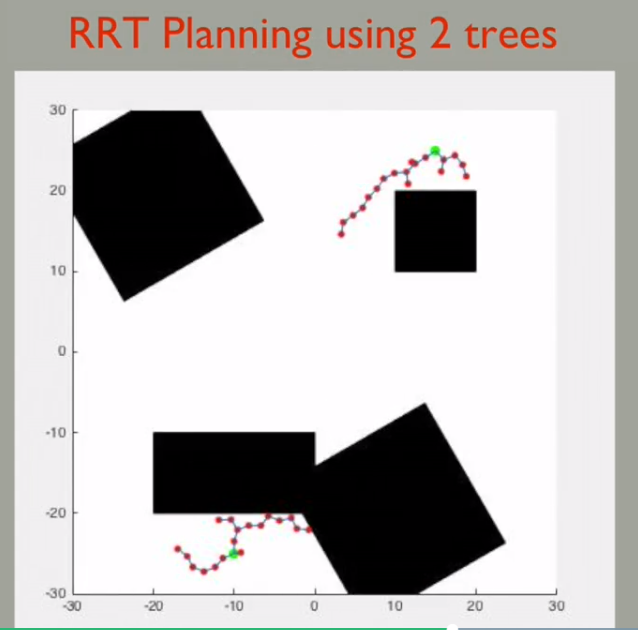
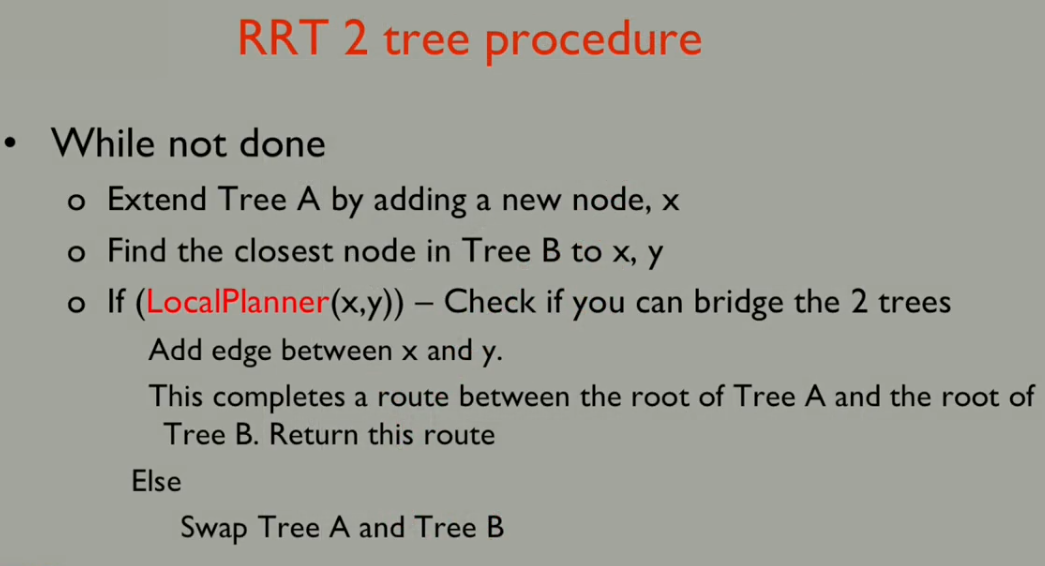
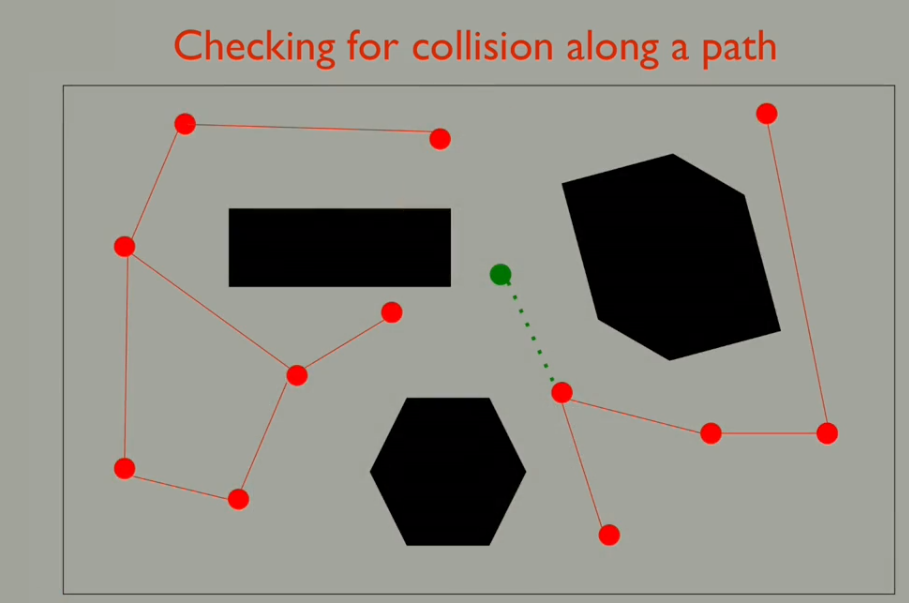
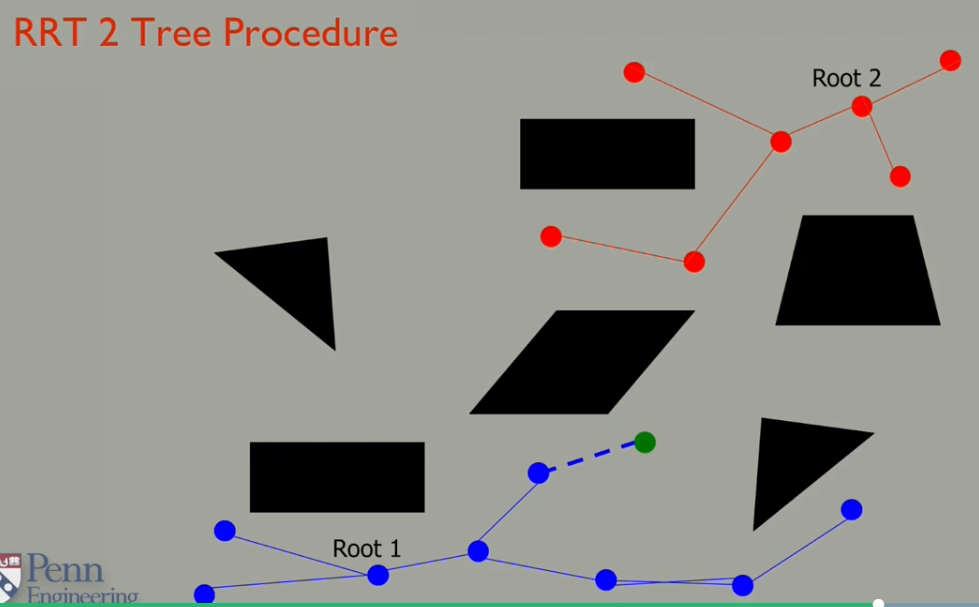 check if green node (new node in blue tree) can be lined to the red tree
check if green node (new node in blue tree) can be lined to the red tree
 not succeed
not succeed
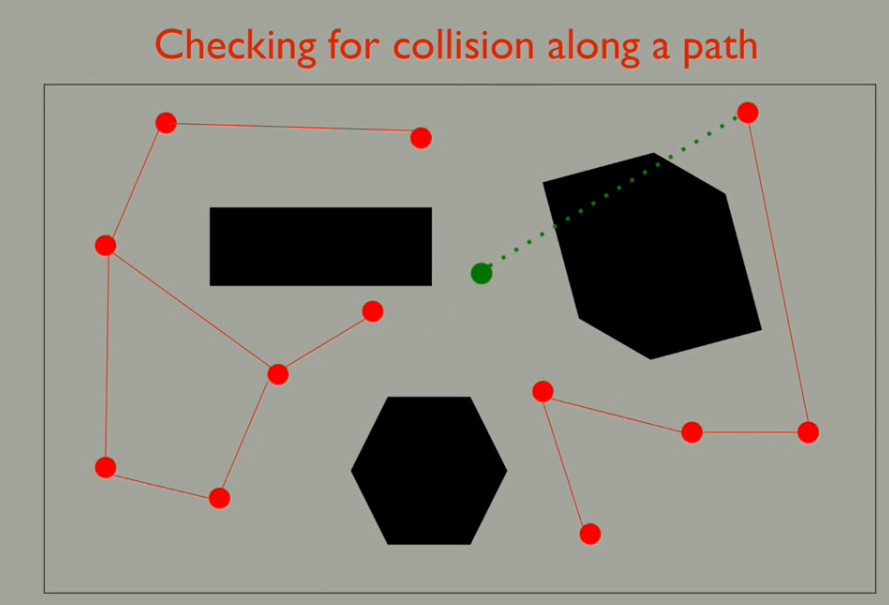
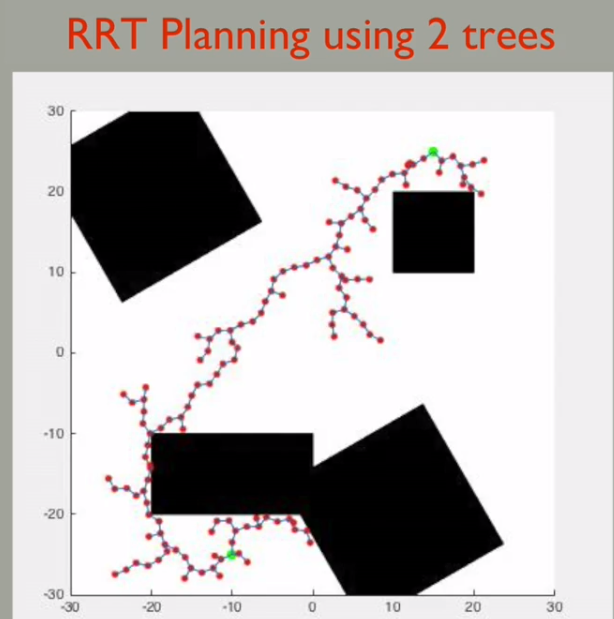
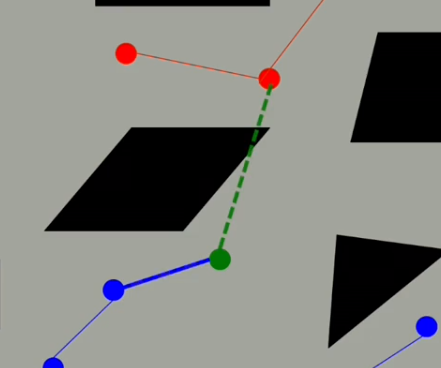
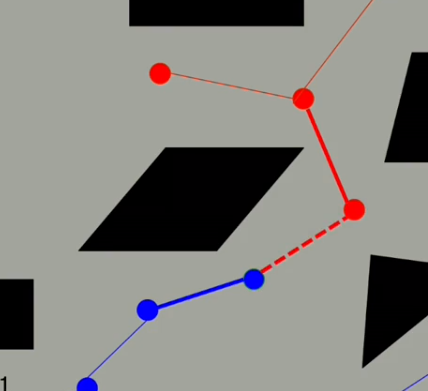 succeed this time
succeed this time
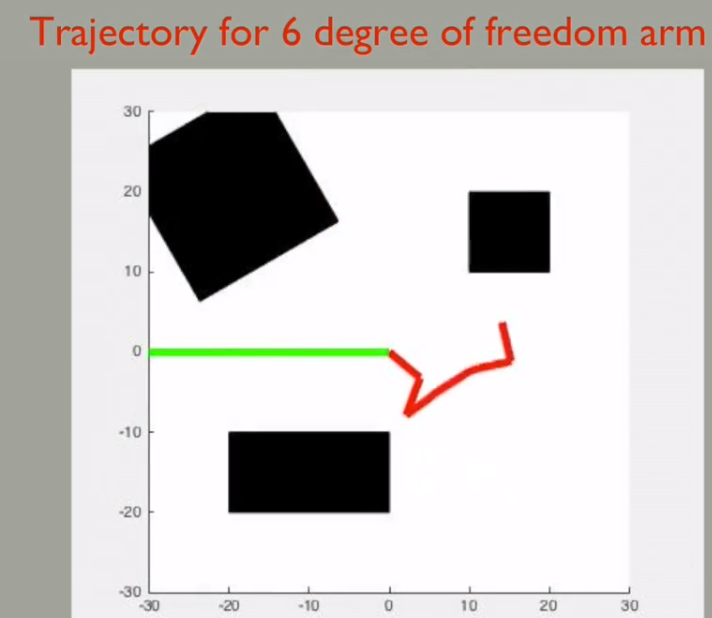
Another important feature of the RRT approach is it can be used on systems that
have dynamic constraints, which limit how they can move.
Example: Car-like robot

















 12万+
12万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









