



1. Origin
原始目标检测: HOG梯度模型+目标匹配
为了提过对目标形变的鲁棒性(多视角->多组件):
目标形态多样性—>多个模型
目标的动态变化多视角—> 子模型
目标形变—> 图结构的组件模型策略
DPM目标检测:
HOG特征提取+SVM分类器+滑动窗
2. 改进的HOG特征
1) 原始HOG特征(histogram of gradient)->局部物体外形能被光强梯度或边缘方向的分布所描述,一幅图被分为小的连接区域(cells)
对图像局部出现的方向梯度进行计数,与边缘方向直方图,scale-invariant feature transform 类似, 不同点HOG基于一致空间密度矩 阵来提高准确率。
局部直方图通过计算图像中的一个较大的区域(block)的光强作为对比标准化,然后归一化block中的所有cells。(光照,映射不变形)
计算流程:
灰度化->分为cells->计算每个cell中pixels的gradient->统计cell的梯度直方图,每个cell的描述子
没有旋转,尺度不变形,计算量小;
解决尺度变换: 图像进行尺度房宿
解决旋转变换:建立不同方向的模板
2)改进HOG
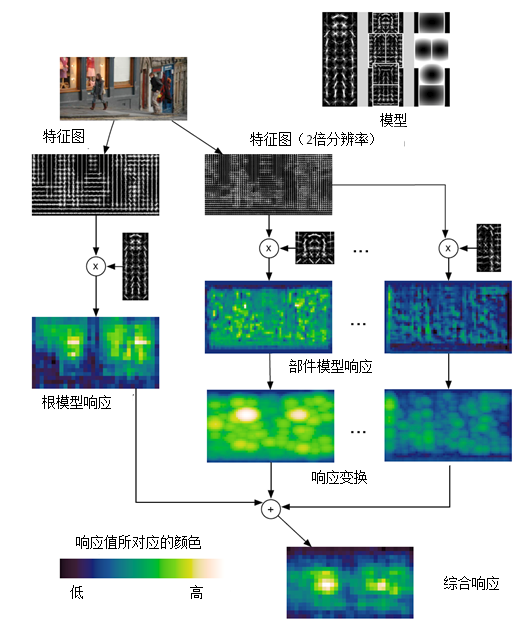
3. DPM检测
采用滑动窗检测,通过构建尺度金字塔在各个尺度搜索(解决尺度变换问题)
对于旋转问题:建立多个模板?
基本结构:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









